


フィールド指向の制御アルゴリズムによるEVパワートレイン性能の平滑化
高性能モーターには、滑らかさ、信頼性、効率を高める制御メカニズムが必要です。このようなアプリケーションの最も適切な例の1つは、電気自動車(EV)パワートレインで使用されるモーターです。これは、フィールド指向制御(FOC)ベースのシステムで制御できます。
EVパワートレインがスムーズに駆動するためには、モーターが広範囲の速度で動作し、最低速度で最大トルクを生成できるように制御する必要があります。技術的に言えば、モーター制御はトルクと磁束に基づいている必要があるため、電流を制御することでトルクを正確に制御できます。
モーターのローターを回転させる基本原理は、ステーターに磁場を発生させることです。これは、固定子コイルに交流電流を加えることによって行われます。モーターのスムーズな動作の秘訣は、ローターの磁束軸とステーターの磁気軸の間の角度であるローターの位置を知ることにあります。この値がわかれば、固定子電流は回転子のトルク軸に合わせられます。ピーク効率を達成するには、固定子の磁束が回転子の磁束に対して垂直である必要があります。
FOCベースのモーター制御
紙の上では、典型的なフィールド指向制御(FOC)ベースのモーター制御システムが図1に示すように表示されます。
クリックしてフルサイズの画像を表示
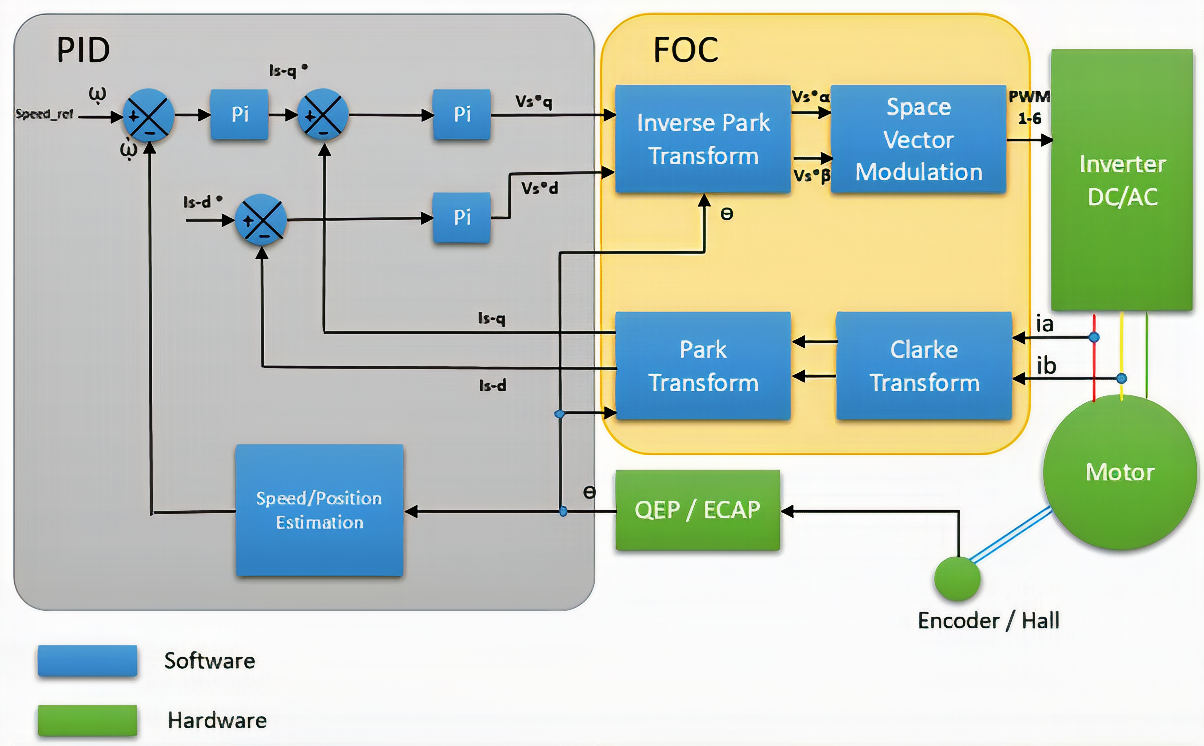
図1:この図は、FOCベースのモーター制御システムのハードウェアおよびソフトウェアコンポーネントを示しています。出典:Texas Instruments
ソフトウェアとハードウェアの各コンポーネントを理解しましょう:
- 三相インバーター :三相AC / DCインバーターは、駆動用のPMSM / BLDCモーターに三相電圧を供給します。空間ベクトル変調(SVM)ブロックからパルス幅変調(PWM)信号を受け取ります。
- QEPインターフェース :エンコーダーと連動してローターの機械的位置を取得し、他のブロックに渡します。
- 速度/位置推定ブロック :名前が示すように、ローターの位置と速度を取得するための計算は、このブロックで実行されます。
- PID制御 :比例積分微分(PID)は、トルクの形でモーターからのフィードバックに依存する制御ループです。目的のトルクとPark変換ブロックから受け取ったトルクの差を計算することにより、修正を行います。
- クラークトランスフォーム :Clarke変換ブロックは、Clarke変換式を使用して、固定子電流(ia、ib)を磁束およびトルク(d-q)座標系に変換します。三相システムの静止座標系は、静止座標系で2象限システムに変換されます。
- パーク変換と逆パーク変換 :このブロックは、直交軸を持つ2相システムで静止座標系を回転座標系に変換します。直交成分はd-qであり、それぞれモーターの直接軸と直交軸です。逆パーク変換ブロックは、固定子出力電圧を固定フレーム基準(固定子基準)に変換し直す必要がある場合に表示されます。
- 空間ベクトル変調 :これは、モーターに適用されるPWM信号を決定する手法です。 SVMは、入力として固定子電圧ベクトルを受け取り、出力として三相出力電圧を生成します。
次に、これらのコンポーネントがFOCアルゴリズムを使用してモーターを駆動する際にどのように使用されるかを探ります。
FOCワークフローのビュー
三相電気モーターを制御するには、相電流Ia、Ib、Icを読み取ってモーターに適切な電圧を供給する必要があります。それらを制御しないと、回転子磁束ベクトルに対して90度の固定子磁束ベクトルを作成することはできません。
FOCは数学を多用するアルゴリズムであり、FOCの開発は非常に複雑ですが、これ以上のことを簡単に実現できます。 FOCアルゴリズムは、三相正弦波電流の参照フレームを磁束とトルク(d-q)の参照フレームに分解することにより、それらの参照フレームの制御を簡素化することができます。これら2つのコンポーネントは別々に制御できます。
図1は、ローターの位置を決定し、それを速度/位置ブロックに渡すエンコーダー/ホールを示しています。この値は、パークおよび逆パーク変換ブロックにも供給されます。同時に、モーターからの相電流(ia、ib)がクラーク変換ブロックに供給されます。モーターからの相電流は、クラーク変換によって2つの直交電流(iα、iβ)に変換されます。新しく変換された相電流は、それぞれトルク生成電流と磁束生成電流を意味します。相電流を磁束成分とトルク成分に分解することに成功しましたが、それらは依然として正弦波であるため、変化し続けるため制御が困難です。
FOCアルゴリズムの次のタスクは、正弦波を取り除くことです。これには、1つの重要な入力であるローター位置が必要です。この図では、この値がPark-transformブロックにも供給されていることがわかります。このブロックでは、固定子の観点から静止した参照フレームから、回転子の観点から回転する参照フレームに移動するのがコツです。簡単に言えば、パーク変換ブロックは2つのAC電流(iα、iβ)をDC電流に変換します。これにより、PIDブロックが希望どおりに制御するのが非常に簡単になります。
それでは、PIDブロックを写真に取り入れましょう。 FOCブロックからPIDブロックへの入力は、IqとId、トルクと磁束成分です。 EVのコンテキストでは、ドライバーがスロットルを操作すると、PIDブロックは速度基準を受け取ります。 PIDブロックは、2つの値を比較し、エラーを計算します。このエラーは、PIDブロックがモーターを回転させる必要がある値です。 PIDブロックが提供する出力はVqとVdです。この出力は、クラークとパークの逆変換に到達し、クラークとパークの変換の正反対が行われます。逆パーク変換ブロックは、回転座標系を静止座標系に変換して、モーターの位相を整流できるようにします。
クリックしてフルサイズの画像を表示
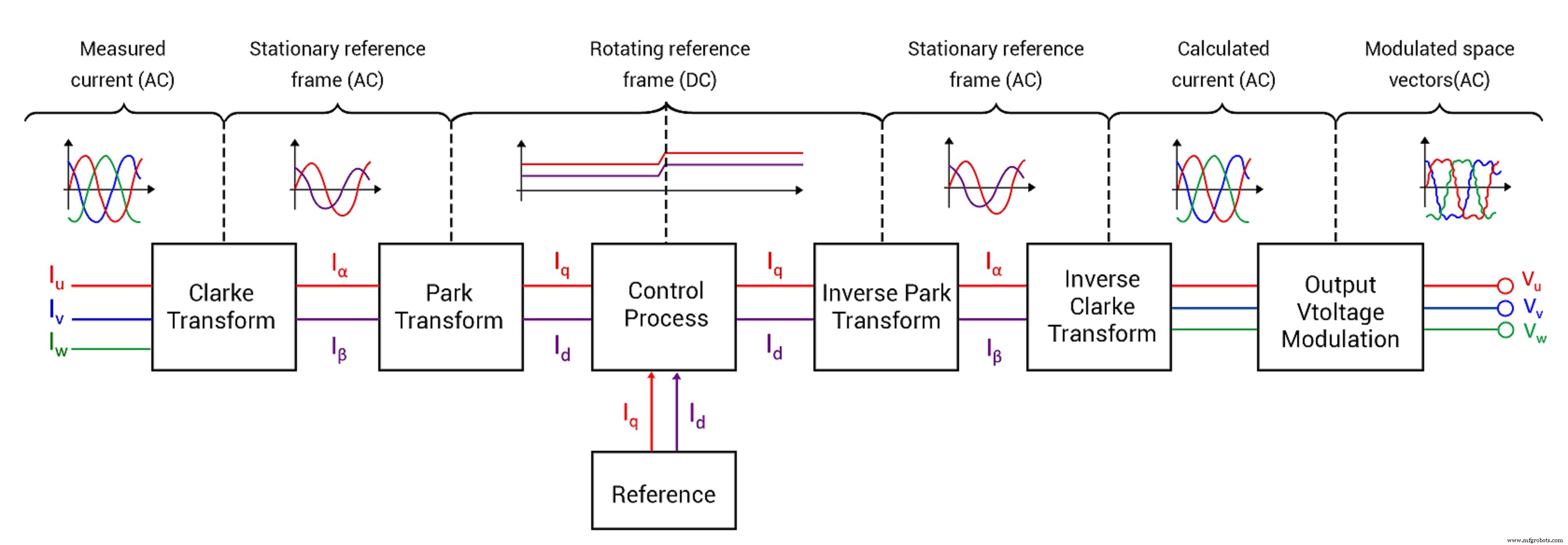
図2:PIDからの出力は、クラークとパークの逆変換に到達し、クラークとパークの変換の正反対が行われます。出典:Texas Instruments
FOCアルゴリズムベースのモーター制御の最後のステップでは、空間ベクトル変調(SVM)の役割が非常に重要になります。 SVMの役割は、インバーターに供給されるPWM信号を生成し、インバーターがモーターを駆動する三相電圧を生成することです。ある意味で、SVMは逆クラーク変換の役割も果たします。
三相インバーターには、モーターに出力電圧を供給する6つのトランジスターがあります。これらの出力は、上部のトランジスタが閉じていて下部のトランジスタが開いているか、またはその逆である必要がある、本質的に2つの状態があります。 2つの状態と3つの出力で、合計8つの状態(2 3 )を計算できます。これらの8つの状態(ベースベクトルとも呼ばれます)を六角形の星の図にプロットすると、隣接する各ベクトルの位相差が60度離れていることがわかります。 SVMは、出力電圧(V out )を与える平均ベクトルを見つけます。 。
事実上のEVモーター制御
EVの設計には、モーター制御方式としてのFOCが不可欠です。 EVに求められるノイズのないスムーズなモーター動作を備えたFOCは、優れたフィット感として際立っています。多くのOEMおよび制御システム開発者は、EVプログラムの固有の要件に合わせて、標準のFOCアルゴリズムを微調整することがよくありますが、コアコンセプトは同じです。
Microchip社のPIC18Fxx39ファミリーのマイクロコントローラーやTIのC2000リアルタイムマイクロコントローラーなどの自動車グレードのMCUの進歩により、EVモーター制御システム用のFOCアルゴリズムの開発を促進することができます。
>>この記事は、もともと姉妹サイトであるEDNで公開されました。 。
>
 Vaibhav Anand Embitelのデジタルマーケティングエグゼクティブです。
Vaibhav Anand Embitelのデジタルマーケティングエグゼクティブです。  Saurabh S. Khobe Embitelの組み込みエンジニアです。
Saurabh S. Khobe Embitelの組み込みエンジニアです。
>
関連コンテンツ:
- 決定論的な多軸モーター制御設計の課題を解決する
- EVトラクションインバーターを安全に制御する
- 新しいソリューションは、電気自動車の電力管理を強化します
- E / E開発の要件を特定する
- モーターコントローラーはArmCortex-M0コアを統合します
Embeddedの詳細については、Embeddedの週刊メールニュースレターを購読してください。
埋め込み
- 許容回路とインターロック回路
- モーター制御回路
- ソフトウェアスイートは、モーター制御設計を簡素化します
- ザイリンクスは、5G無線用のデジタルフロントエンドハードIPでRFSoCのパフォーマンスを向上させます
- データモジュール:スマートコントロールを備えた23.1インチの超伸縮TFTディスプレイ
- マキシム:PWM除去を備えた双方向電流センスアンプ
- モーターコントローラーはArmCortex-M0コアを統合
- Lanner:マルチコアプロセッサを使用したガラス化に最適化されたソリューション
- ブログ:優れたパフォーマンスを備えた医療用ウェアラブル
- CNC付き旋盤
- モーターコントロールのすべてのニーズに対応するSEW-Eurodriveを信頼すべき理由