


決定、決定:ハードウェアアクセラレータまたはDSP?
このトピックに関する最初の2つのブログでは、DSPが突然どこにでも出現する理由と、特にDSPがより柔軟で将来性のあるオプションとして一部のカスタムハードウェアアクセラレータ(HWA)に取って代わり始めている理由について話しました。このブログでは、HWAの実装ではなくDSPについて考える必要があるかどうかを判断するために従うことができる、より詳細な分析について説明したいと思います。

(出典:CEVA)
前回のブログで、DSPの理想的なアプリケーションのいくつかについて触れました。モデムまたはオーディオ信号の信号処理は明らかな例です。もう1つの非常に一般的な例は、自動運転車のレーダーでの信号処理です。これは、モデムでの信号処理と非常によく似ています。これらの多くは、小さなコントローラーと組み合わせたハードウェアアクセラレータを中心に構築されています。現在、これらのソリューションプロバイダーの間で、HWAによって現在処理されている信号処理と一部の制御を組み合わせて、機能の多くがDSP上で実行されるソフトウェアに基づくアーキテクチャに切り替えるという重要な傾向が見られます。理由は単純です。ソフトウェアは、機能の柔軟性を高め、コストを大幅に削減し、進化する通信標準に適応するためのタイムリーな機能を提供します。
全地球測位は別のアプリケーションであり、この場合、三角測量の計算にDSPに固有の数学機能を大いに活用しています。最初は、GPSサポートだけが必要だと思うかもしれません。おそらく、ハードウェアアクセラレータで非常に高速な実装を構築できます。ただし、グローバルGNSS標準では、GLONASS(ロシア)、Galileo(ヨーロッパ)、BeiDou(中国)のサポートも考慮する必要があります。 DSPで実行している場合、すべてのバリアントのサポートはソフトウェアで実行できるため、GPSのハードワイヤード実装は、市場を不必要に制限する可能性があります。
これまでのところ、原則としては非常に優れていますが、DSP実装は、カスタムハードウェア実装と比較してどのように機能しますか?今日は、人気のある1つの例を挙げて説明します。IoTアプリケーションを構築していて、通信にNB-IoTを使用することを計画しているとします。サブフレームの長さは1msで、その時間内に完了する必要がある特定の処理の制限を定義します。この例では、物理層アルゴリズム、L1制御コード、およびプロトコルスタックが含まれます。 100MHzで動作する一般的な低電力DSP / NB-IoTプラットフォームの場合、1msでこれらの計算を完了するための100kサイクルが得られます。
同等のDSP実装で期待できるパフォーマンスの種類を見積もるには、組み込みDSPベンダーと協力する必要があります。このような企業は、パフォーマンスとパワーを特徴とする複数のアプリケーション向けに、プラットフォーム上でソフトウェアソリューションをすでに提供しているはずです。パフォーマンスのために、関数(この場合はNB-IoTモデム)のサイクルカウントの見積もりを提供し、以下のようなグラフを提供できる必要があります。グラフの各ポイントは、実行に必要なサイクル数を表し、グラフは、時間とともに変化する負荷の範囲にわたってグラフ化されます。グラフには、選択した動作周波数でのピーク許容サイクルも表示されます。
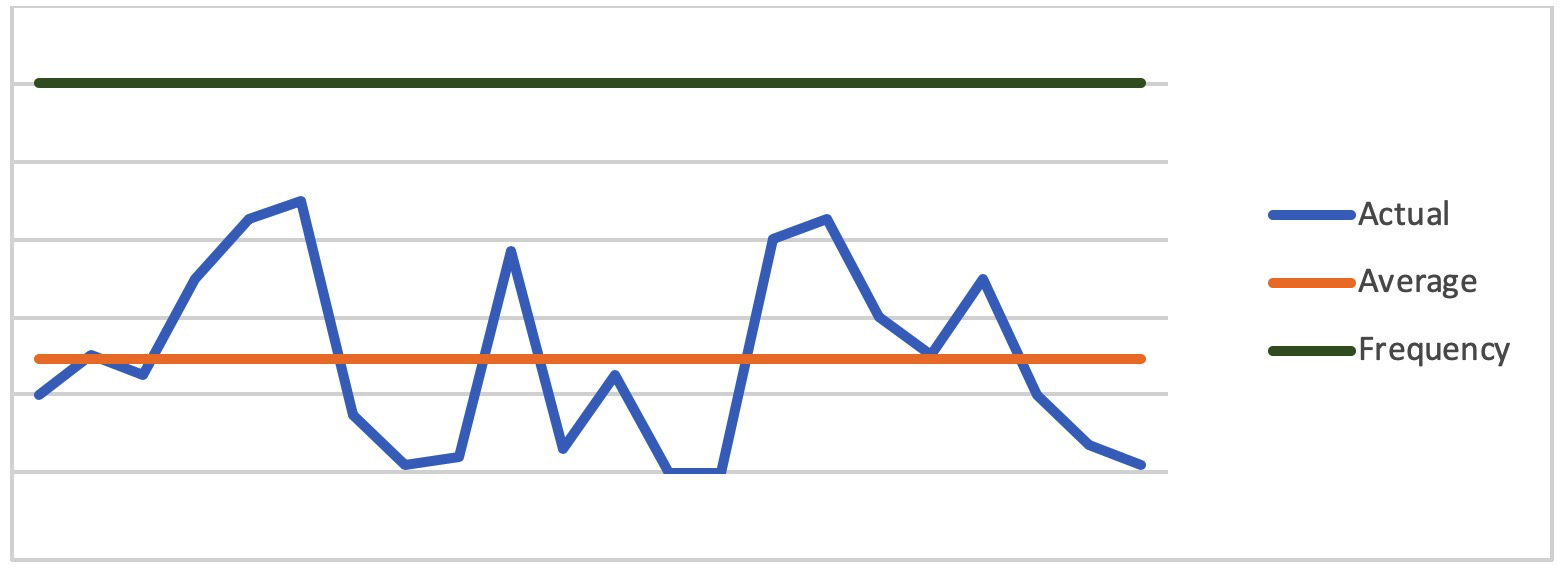
(出典:CEVA)
これで、アプリケーションの負荷がその頻度で機能するかどうか、またはヘッドルームを増やすために頻度を増やす必要があるかどうかを見積もる方法があります。もちろん、この見積もりはベンダーのソフトウェア実装に基づいていますが、かなり適切に調整されると期待するのは妥当です。彼らのソフトウェアを使用することを約束する必要はありませんが、見積もりは意思決定を導くのに十分なものでなければなりません。
希望する動作周波数で十分な余裕がある場合は、HWA機能をDSPに移動したり、GNSSロケーションサポートなどの差別化機能を追加したりできます。一方、遅延要件を満たすために周波数を上げる必要がある場合は、周波数を上げると面積と消費電力が増えることを考慮に入れる必要がありますが、それも可能です。
電力の見積もりを取得する簡単な方法は、並列処理、MACユニットなどを使用して、ソフトウェアのどれだけが真のDSPコードに入るのか、そしてどれだけが制御コードに入るのかを調べることです。関数を呼び出し、意思決定やその他の標準的な操作を行う目的のコード。通常、この分割を目で確認できます。たとえば、40%の制御コードと60%のDSPコードです。 DSPベンダーは、これら2つのケースの一般的な電力数を提供することがよくあります。たとえば、制御コードの場合は2mW、DSPコードの場合は4mW(いずれの場合も100MHz)です。計算では、DSPの平均アクティビティ、たとえば周波数の50%を考慮に入れる必要があります。したがって、この例では、(0.4 * 2 + 0.6 * 4)* 0.5 =1.6mWの平均電力(50%の平均アクティビティを想定)を推定します。
要約すると、アクセラレータ機能のDSP実装に期待できるパフォーマンスとパワーのかなり合理的な見積もりを作成できるはずです(本当に珍しいものを開発している場合を除きます。この場合、DSPでアプリケーションをモデル化する必要があります。サイクルカウントのかなり正確な見積もりを取得するためのSWツール)。ソフトウェアの実装によって得られる柔軟性の向上と、複数のアクセラレータを1つのプロセッサに組み合わせることでコストを節約できることを考えると、DSPソリューションは非常に魅力的です。
埋め込み