


自動車用カメラリンクの課題の克服
カメラシステムとカメラリンクテクノロジーは、ドライバーを支援し、運転体験を向上させるために、車両のますます多くのアプリケーションに導入されています。 1台のカメラを備えた従来のリアビューカメラ(RVC)システムは、車両の360度の視点を提供する4台以上のカメラを備えたサラウンドビューシステム(SVS)に取って代わられています。ドライブレコーダー、ブラインドスポットモニタリング、ナイトビジョン、道路標識認識、車線逸脱モニター、アダプティブクルーズコントロール、緊急ブレーキ、低速衝突回避システムはすべて、ドライバーの負担を軽減するのに役立ちます。運転体験を強化するために、ドライバーのバイタルサインの監視、乗員の検出、ヒューマンマシンインターフェース(HMI)のジェスチャ認識など、さまざまなアプリケーションにカメラが導入されています。カメラシステムの開発により、自動車メーカーは、ドアミラーなどの従来の機能を置き換えることで、車両のシルエットを再考することさえ可能になっています。
クリックすると拡大画像が表示されます
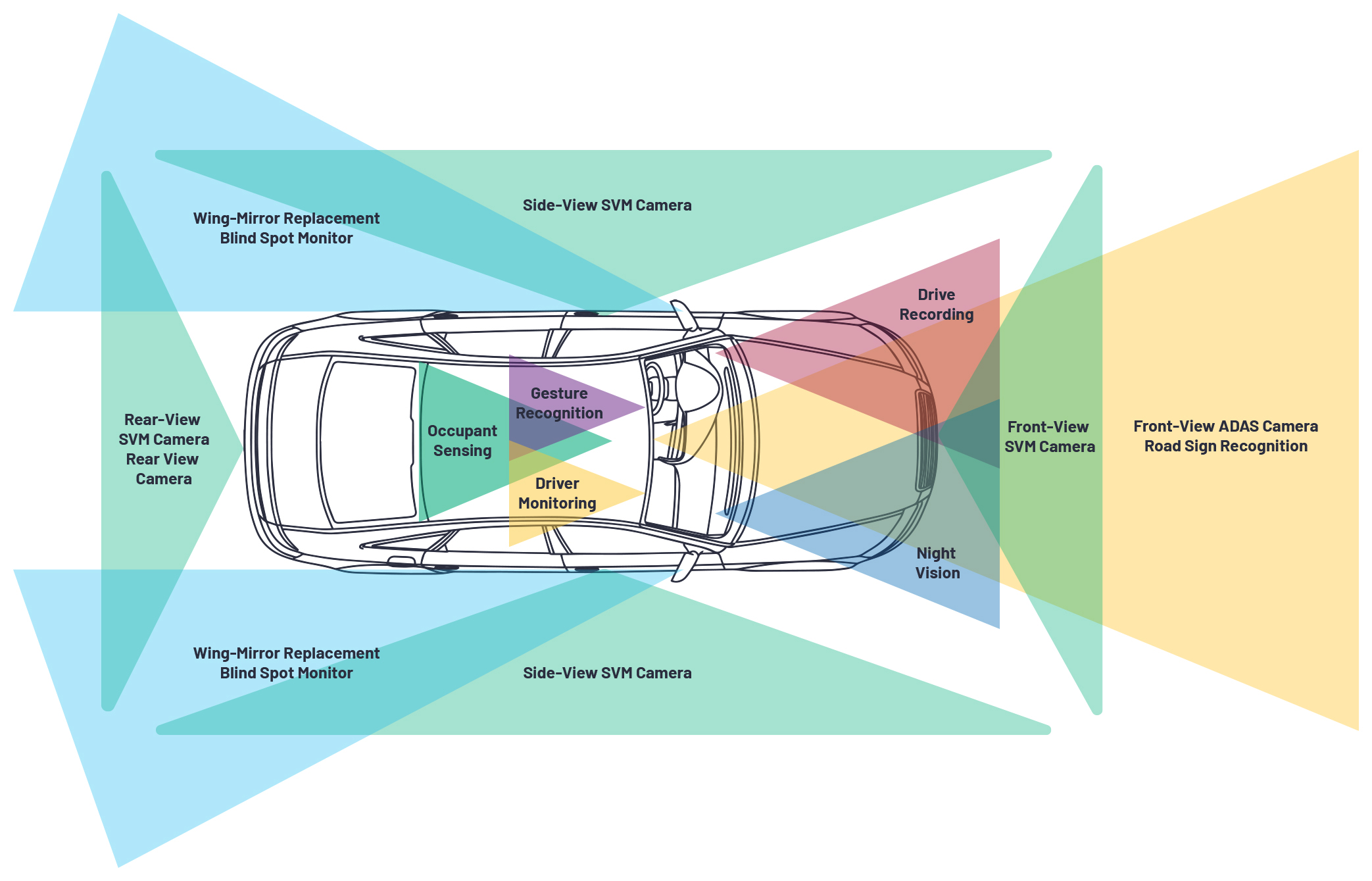
図1.現代の車両におけるカメラの急増。 (出典:Analog Devices)
リストされているカメラアプリケーションの多様な配列の多くは、今日の多くの車両にまだ搭載されている標準画質(SD)RVCシステムの起源を共有しています。 SDカメラシステムは、10年以上にわたって自動車アプリケーションに日常的に導入されており、法律上の要件や顧客の期待に応えて、プレミアム車両からより幅広い車両ラインに普及しています。 SDビデオシステムは、自動車OEMに多くの価値ある利点を提供しました。長年にわたって消費者向けテレビ業界で証明された技術の成熟による低リスク、低帯域幅の需要により、制御されたエミッションを維持しながら安価なケーブルとコネクタを使用できるようになりました。不安定な可能性のあるビデオ入力の処理が実証された、成熟した範囲のビデオエンコーダーおよびデコーダー。
今日、消費者向けデバイスでの超高精細(UHD)ディスプレイの普及により、あらゆるタイプの車両でのより大型で高精細なディスプレイの要件が高まっています。 SDビデオは小さいディスプレイでは満足のいくように見えるかもしれませんが、今日の消費者は大きいディスプレイではその欠点を簡単に認識できます(たとえば、SDビデオの帯域幅の制限による高周波ディテールの欠如、または輝度を分離するときに導入されるクロスカラーアーティファクトおよび変調信号内の相互のクロミナンス信号)。より大きなディスプレイへの傾向により、自動車OEMは、残りのカメラアーキテクチャを高解像度にアップグレードすることが課題となっています。この課題に対処するための重要な構成要素の1つは、カメラから受信ユニット(ECUやディスプレイなど)に画像データを転送するために選択されたカメラリンクテクノロジーです。
アプリケーションに新しいカメラリンクテクノロジーを選択する際の最初の使用例の特徴は、必要な帯域幅です。カメラシステムは、帯域幅要件の点で広範囲に及びます。 SDビデオ解像度を使用する従来のRVCシステムは、低帯域幅(たとえば、6 MHz)を必要とします。通常低速で使用されるSVMシステムは、露出を最大化するために低いリフレッシュレート(たとえば、30 Hz)を使用します。これにより、必要な帯域幅が制限される可能性があります。車両の動作速度の全範囲で動作するドアミラー交換システムは、より高いリフレッシュレート(たとえば、60 Hz以上)を使用して、帯域幅の増加を必要とする遅延を最小限に抑えます。自動運転アプリケーション用の前面カメラは、超高解像度(たとえば、18 + MPixel)を必要とするため、非常に高い帯域幅要件があります。幅広い帯域幅機能を提供するために、多くのカメラリンクテクノロジーが存在します。それらの選択は、カメラシステムと車両全体のいくつかの側面に影響され、影響を与える可能性があります。
画質
カメラリンクテクノロジーが可能にする画質は、アーキテクチャ設計の重要な要素です。十分な帯域幅を提供しないカメラリンクテクノロジーを介してビデオデータを送信すると、画像の整合性が失われたり、画像が完全に失われたりする可能性があります。カメラリンクテクノロジーによって引き起こされる画像の劣化は、画像の鮮明さやダイナミックレンジなどの要素を測定することで評価できます。
ケーブル属性
現代の車両の完全なケーブルアセンブリまたはワイヤーハーネスは、最も複雑で、重く、取り付けが難しいコンポーネントの1つです。平均的な車は1kmをはるかに超える配線を備えているため、ハーネスには深刻な考慮が必要です。第一に、より高い帯域幅要件を持つアプリケーション(たとえば、自動運転車用の超高解像度前面カメラ)には、高品質で重いケーブルが必要です。ケーブルの重量は、燃焼機関車と電気自動車の両方の航続距離を伸ばすために自動車をより軽く、より効率的にすることに焦点が当てられていることから、近年、ますます精査されるトピックとして浮上しています。車両を通る複雑なルーティングを伴うアプリケーションでは、ケーブルでサポートされる曲げ半径が重要になる場合があります。カメラがヒンジ付きの本体部分に配置されているアプリケーション(たとえば、SVMシステムのドアやRVCおよびSVMシステムのトランクリッド)の場合、サイクルを開閉するケーブルの堅牢性が重要です。ケーブルが過酷な環境にさらされる可能性のあるアプリケーションでは、耐水性が必要になる場合があります。
選択したカメラリンクテクノロジーとケーブルタイプに関係なく、ケーブル1センチメートルごとにコストがかかり、ハーネスのすべてのコストを照合すると、ハーネスが車両の3つの最も高価な要素の1つになる可能性があります。
従来のSDビデオシステムは、帯域幅の需要が低いため、非常に費用効果の高い軽量ケーブルの使用を容易にします。多くの場合、CANなどの低速制御リンクに通常使用されるものと同様のシールドなしツイストペア(UTP)ケーブルがSDビデオに使用されます。
コネクタ
ワイヤーハーネスとそれに接続されたモジュールのもう1つの重要な要素は、電気コネクタです。ハーネスを制御モジュール、センサー、またはモーターに接続することに加えて、コネクタは、ハーネス内の同じケーブルの異なるセクションを結合するためにも使用されます(インラインコネクタ)。インラインコネクタは、ハーネスの構造、設置、および保守性を簡素化するために、自動車業界で広く使用されています。たとえば、カメラのすぐ近くにインラインコネクタを使用すると、カメラが損傷した場合でも、車両の他のワイヤーハーネスに大きな影響を与えることなくカメラを交換できます。
上記のケーブルの選択と同様に、コネクタの選択は、カメラシステムの全体的なコストを大きく左右する可能性があります。高解像度システムは通常、より高い帯域幅をサポートするコネクタを必要とするため、より高価です。
その他のコネクタの考慮事項には、PCBおよびECU表面でのコネクタのフットプリント、コネクタをシールする必要があるか、シールを解除する必要があるか、色分け/キーイングが必要かどうかなどがあります。
従来のSDビデオシステムは、カメラとECUまたはヘッドユニット(HU)の両方で費用効果の高いコネクタの使用を容易にします。たとえば、SDビデオRVCシステムのビデオ信号は、マルチピンコネクタ上の他の信号(たとえば、制御ネットワークや必要な電源信号)とともにECUまたはHUにルーティングされることがよくあります。デジタルリンクには通常、専用コネクタが必要です。これにより、ECUにPCBとパッケージングの制約が生じます。
車両アーキテクチャ
関連する車両のアーキテクチャは、適切なカメラリンクテクノロジーの選択にいくつかの影響を与える可能性があります。標準的な車両のケーブル長は、多くの場合、最大数メートルの長さになる可能性があり、消費者がより大型のスポーツユーティリティビークルに向かう傾向にあるため、ケーブル長は増加しています。一部の車両アーキテクチャには、トレーラーの逆転と操縦をサポートするトレーラーの逆転支援など、新しいケーブル長の課題を引き起こす可能性のある追加機能があります。
商用車は、カメラシステムがケーブルを最大長まで伸ばすというもう1つのアーキテクチャ上の課題です。ほとんどのカメラリンクテクノロジーは、これらの車両アーキテクチャと機能のいずれかをサポートできますが、長いケーブル長をサポートするために、リピーターや再送信機などの追加モジュールが必要になる場合があります。
EMC
ケーブルが車両内のアンテナになり、有害な結果をもたらす可能性があるため、ケーブルの電磁放射とイミュニティの堅牢性は、カメラリンクテクノロジーの選択プロセスにおけるもう1つの重要な要素です。車両内の電気および電子システムの急増により、互換性のある方法で一緒に存在するそのようなシステムへの依存度が高まっています。いずれかが有効になっている場合、あるシステム(RVCシステムなど)が別のシステム(電気自動車のトラクションモーターや電気シートメカニズムなど)に影響を与えたり、影響を受けたりすることは許容されません。このためには、選択する前に、リンクテクノロジーのエミッションとイミュニティパフォーマンスを考慮することが重要です。
内部または外部の攻撃者が車両内のシステムに干渉しないことを確認するために、自動車メーカーはすべてのシステムを特定のEMC規格に準拠してテストします。これらのテストは、最初にシステムレベルで実行されます(たとえば、リアビューカメラまたはサラウンドビューシステム)。このテストは、費用と時間がかかり、やりがいがありますが、車両に統合する前に、各モジュールが高レベルの堅牢性を備えていることを確認します。システムレベルのテストが正常に完了すると、自動車メーカーは、高出力の放射信号(放射イミュニティ)が照射されたときにシステムが動作する能力をテストすることにより、システムの動作と車両の性能も検証する必要があります。製造業者はまた、車両内のすべてのアンテナ(FM、GPS、セルラー、Wi-Fiなど)の受信帯域を測定して、干渉信号が存在しないことを確認します。車両レベルでEMCの問題を解決するには、費用と時間がかかる可能性があります。
その他の要件
すでに概説した要件に加えて、制御チャネルの可用性、ピクセル精度、ASIL定格など、他の無数の要求がカメラリンクテクノロジーの選択を導きます。
カメラリンクテクノロジーの選択
カメラシステムを設計する際のカメラリンクテクノロジーの選択は、多くの要因の影響を受けます。カメラリンクテクノロジーの選択は、それが統合されている車両のいくつかの側面にも影響を与えます。 SDビデオテクノロジーに基づいて構築された従来のRVCシステムは、自動車OEMに、車両内でビデオを転送するための非常に信頼性が高く費用効果の高い方法を提供していました。しかしながら、近年、消費者の傾向が現れて、SDビデオシステムをより大きなディスプレイでますます受け入れにくくしている。立法上の進展と消費者の期待も組み合わさって、新しい車両ごとにカメラの数を増やし続けています。
これらの傾向と発展は、自動車用カメラシステムのスペクトル全体で今日の車両で使用されているいくつかのカメラリンク技術の出現の背景として機能します。今日のカメラリンクテクノロジーは、従来のSD RVCシステムで実証されているSDビデオテクノロジー(CVBSなど)から、高解像度アナログリンクテクノロジー、高解像度デジタルリンクテクノロジーまで多岐にわたります。
SDビデオテクノロジーは、低帯域幅のアプリケーションのみを可能にしますが、逆に、非常にコスト効率の高いケーブルとコネクタを必要とします。デジタルリンクテクノロジーは、高帯域幅アプリケーションを可能にし、ピクセル精度などの利点を提供しますが、通常、より高価なケーブルとコネクタが必要です。カーカメラバス(C 2 )のような高解像度アナログリンクテクノロジー B)前述の2つのアプローチの妥協点を提供します。つまり、費用効果の高いケーブルとコネクタを介してEMC準拠の高解像度ビデオを配信します。
高解像度アナログカメラリンクテクノロジー
高解像度アナログビデオ伝送技術C 2 を使用する利点の1つ Bは、自動車のカメラリンクとして使用するために最初から設計されていることです。 C 2 Bは、シールドなしツイストペア(UTP)ケーブルおよびシールドなしコネクタを介したHDビデオをサポートします。これにより、既存のケーブルとコネクタのインフラストラクチャを変更することなく、SDカメラからHDカメラにアップグレードできます。
C 2 Bは、最大2 MPixel(1920×1080)の解像度で送信機から受信機へのHDビデオの転送をサポートします。これは、SDビデオシステムに従来から採用されているUTPケーブルとコネクタの最大帯域幅容量を利用するように設計されており、再送信せずに最大30mのケーブル長を使用できます。 C 2 を確実にするため Bはすべての自動車要件を満たし、最適化された信号構造、アンチエイリアスフィルタ、スペクトル整形フィルタなど、EMCのいくつかの最適化機能を利用しています。
C 2 Bは、最大400 kHzのI2C信号、最大4つのGPIO信号、およびカメラモジュールからの割り込み信号の送信を処理できる制御チャネルを備えています。これにより、カメラモジュール内のマイクロコントローラーユニット(MCU)とECU / HU内のMCUを含むローカル構成だけでなく、カメラモジュールを構成するECU / HU内のMCUを使用したリモート構成も含むシステムアーキテクチャが容易になります。 4つのGPIOは、C 2 を介して静的信号を転送するために使用されます Bリンク。 C 2 を可能にするために、2つの割り込み信号が提供されます。 B送信機はステータス情報をC 2 に通信します Bレシーバー。 C 2 Bは、制御チャネルデータにCRCチェックを適用し、問題が発生した場合に自動的に再送信を開始できます。
クリックすると拡大画像が表示されます
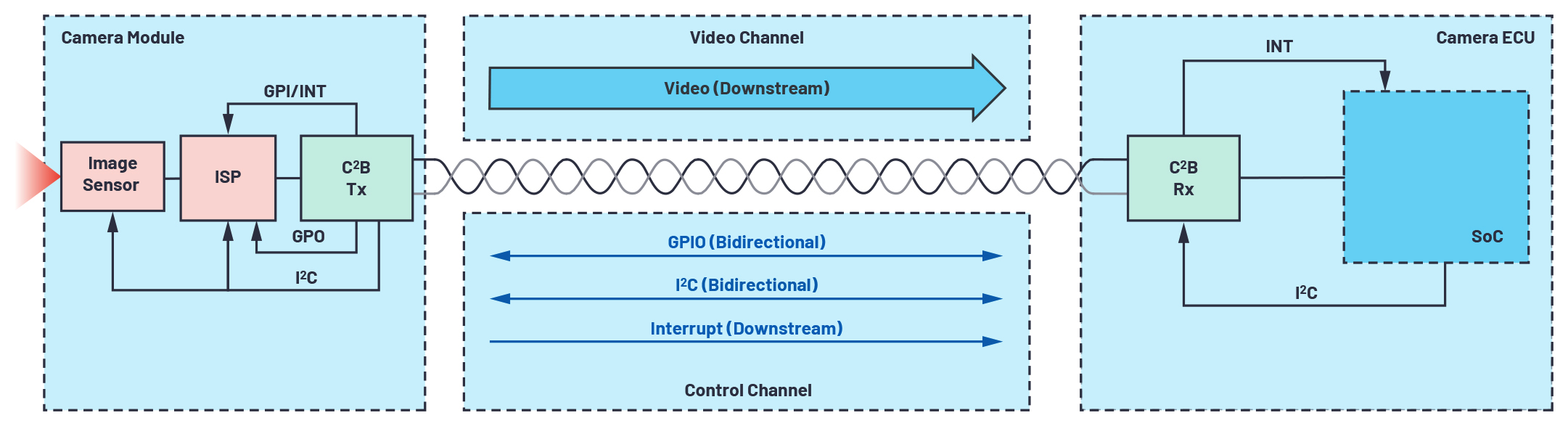
図2.C
2
Bアーキテクチャの概要。 (出典:Analog Devices)
C 2 Bは、ケーブル診断(ケーブルのバッテリー短絡およびアース短絡イベントの発生に関する情報収集)やフレーム数の収集、生成、デコード、送信などの自動車顧客向けの付加価値機能をサポートし、送信されたデータ。
自動車用途向けに定義および設計されたC 2 Bは、いくつかのブロックを使用して、低コストのUTPケーブルおよび低コストのシールドなしコネクタに対するEMC準拠を保証します。これらには、インピーダンス不整合のエコーキャンセレーション、ブロードバンド同相信号除去(UTPケーブルを使用する場合に重要)、およびエミッションを低減するための出力信号のスペクトル整形が含まれます。 C 2 Bはテストされ、国際デバイスレベルのEMC規格および国際システムレベルのEMC規格(CISPR25クラス5 [エミッション]、ISO 11452-2 / ISO 11452-4 / ISO 11452-9、ISO 7637-3 [イミュニティ])に準拠しています。 、ISO 10605 [ESD])。
これらの機能により、C 2 B 2種類の自動車メーカーにとって魅力的なソリューション:SDカメラソリューションをまだ使用していてリスクの低いアップグレードパスを探している人と、デジタルリンクテクノロジーベースのカメラソリューションにすでに切り替えてコスト削減パスを探している人高解像度のアナログリンクテクノロジー。
C 2 が存在するアプリケーションスペース Bは、リアビューカメラ、サラウンドビューカメラシステム、eミラー、乗員監視システムなどの代替テクノロジーに比べて、システムコストに大きなメリットがあります。独立して検証されたC 2 の視覚的に損失のない性質 Bは、デジタルリンクテクノロジーと同様の高解像度のパフォーマンスを提供すると同時に、システムレベルの大幅なコスト削減を実現します。
クリックすると拡大画像が表示されます
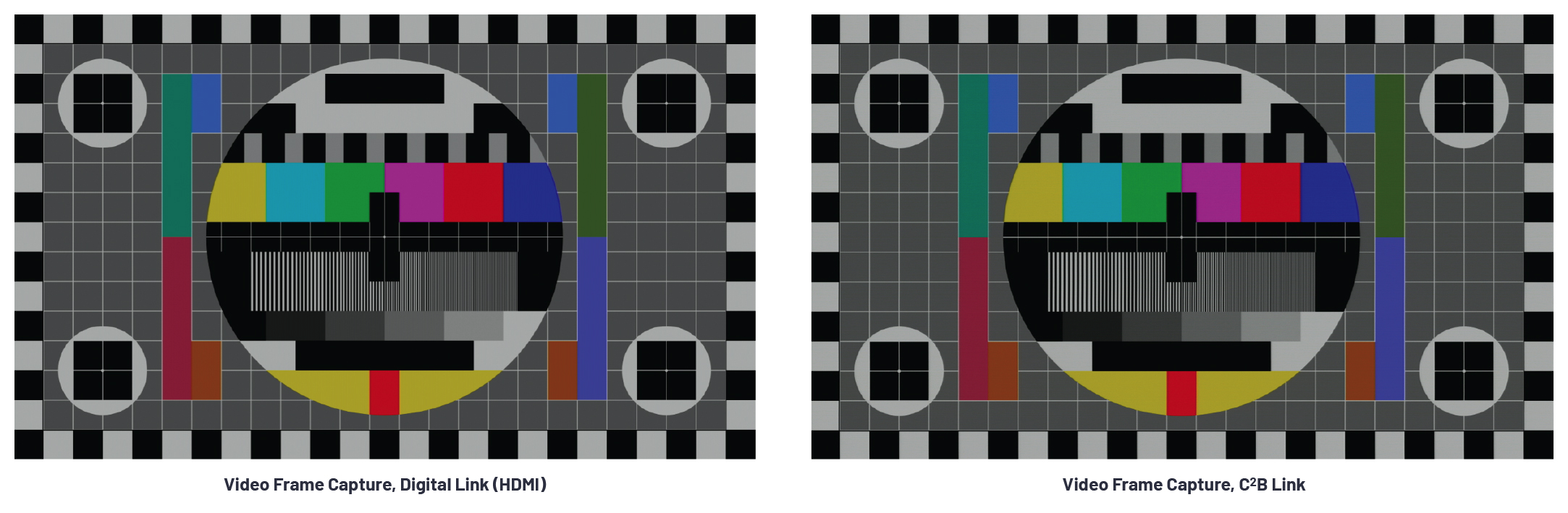
図3.デジタルリンクとC
2
のビデオフレームキャプチャの比較 Bリンク。 (出典:Analog Devices)
クリックすると拡大画像が表示されます
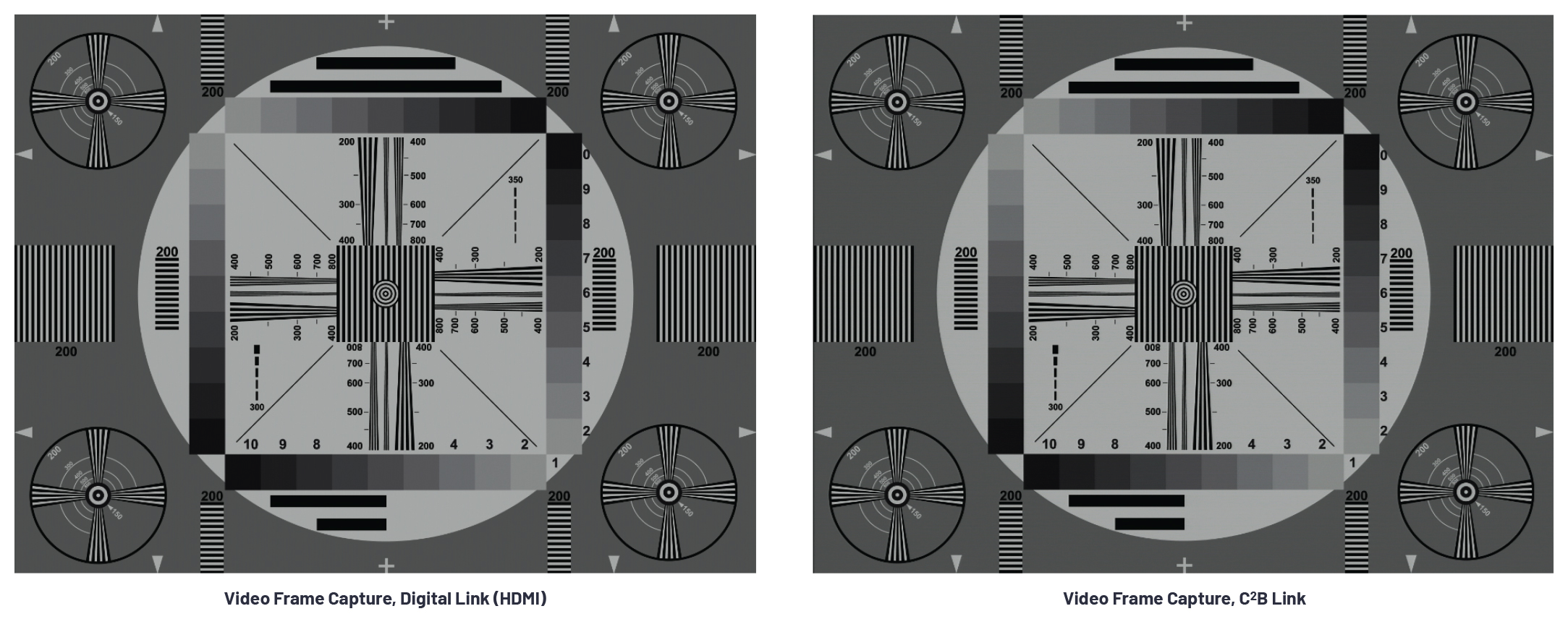
図4.デジタルリンクとC
2
のビデオフレームキャプチャの比較 Bリンク。 (出典:Analog Devices)
C 2 Bを使用すると、自動車メーカーは既存のSDカメラをHDにアップグレードしたり、デジタルリンクテクノロジーを使用してシステムの移行を容易にしたりして、システムコストを削減できます。 C 2 の評価ボード付き Bトランスミッター(ADV7992)およびC 2 アナログ・デバイセズから入手できるようなBレシーバー(ADV7382 / ADV7383)を使用すると、OEMは技術調査とシステムプロトタイピングを加速できます。システムプロトタイピング中、C 2 B送信機評価ボードはC 2 として使用できます レシーバーを開発する場合はBソース、C 2 Bレシーバー評価ボードはC 2 として使用できます カメラを開発する場合はBシンク。
埋め込み