


小型化されたモーター駆動設計のための高速反応フィードバックシステムの設計
位置、速度、方向などのモーター回転情報は、さまざまな新しいアプリケーションで正確なドライバーとコントローラーを生成するために正確である必要があります。たとえば、限られたプリント回路基板に微細なコンポーネントを取り付けるピックアンドプレースマシンなどです。 (PCB)エリア。最近、モーター制御が小型化され、ヘルスケア用の外科用ロボットや航空宇宙および防衛用のドローンでの新しいアプリケーションが可能になりました。より小さなモーターコントローラーはまた、産業および商業施設での新しいアプリケーションを可能にします。設計者にとっての課題は、高速アプリケーションで位置フィードバックセンサーの高精度要件を満たすと同時に、ロボットアームなどの小さなエンクロージャー内に収まるようにすべてのコンポーネントを限られたPCBスペースに注入することです。
クリックすると拡大画像が表示されます
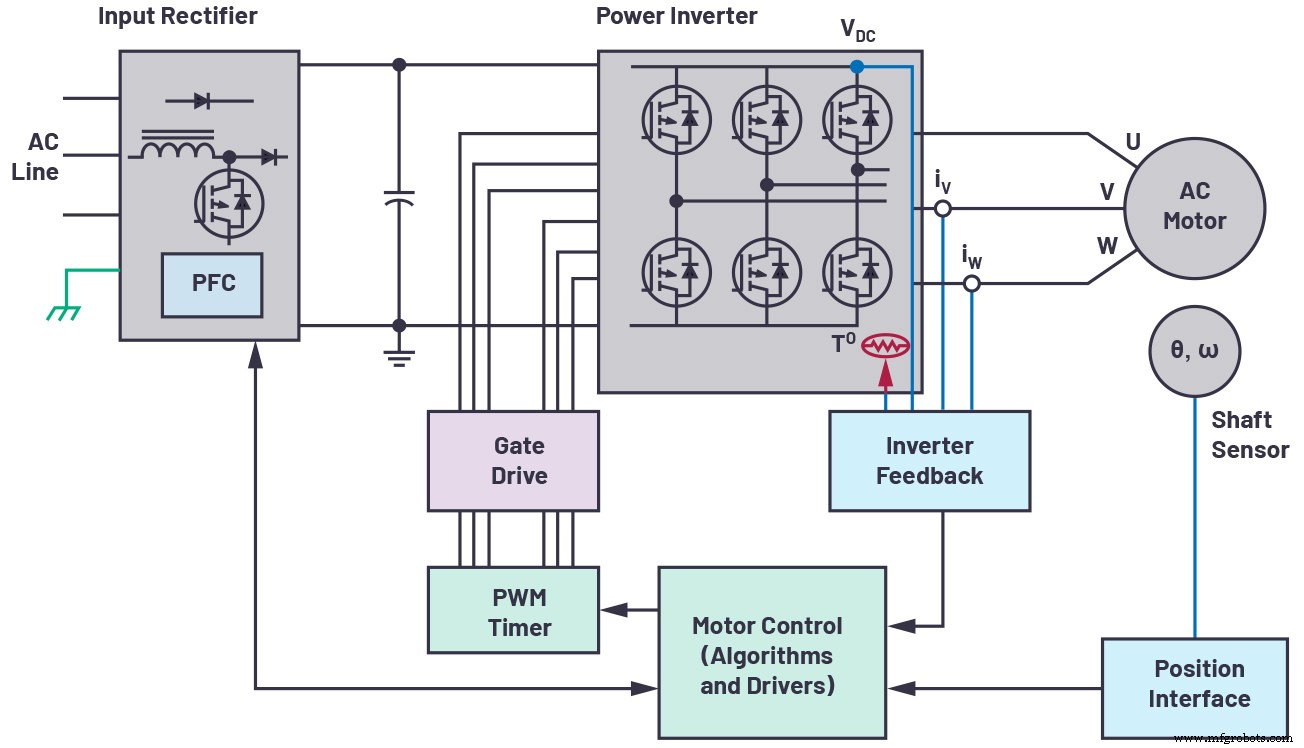
図1.閉ループモーター制御フィードバックシステム。 (出典:Analog Devices、Inc。)
モーターコントロール
図1に示すように、モーター制御ループは、主にモーター、コントローラー、および位置フィードバックインターフェイスで構成されています。モーターは回転シャフトを回転させ、それに応じて機械のアームを動かします。モーターコントローラーは、力を加えるか、停止するか、回転を続けるかをモーターに指示します。ループ内の位置インターフェースは、回転速度と位置情報をコントローラーに提供します。このデータは、小さな表面実装PCBを組み立てるためのピックアンドプレースマシンの適切な操作の中心です。これらのアプリケーションはすべて、回転する物体に関する正確な位置測定情報を必要とします。
位置センサーの分解能は非常に高くなければなりません。モーターシャフトの位置を正確に検出し、小さなコンポーネントを正しくピックアップして、ボード上に正確に配置するのに十分です。また、モーターの回転速度が高いほど、ループ帯域幅が高くなり、遅延要件が低くなります。
位置フィードバックシステム
ローエンドのアプリケーションでは、コンパレータとともにインクリメンタルセンサーで位置検出に十分な場合がありますが、ハイエンドのアプリケーションでは、より複雑な信号チェーンが必要になります。これらのフィードバックシステムは、位置センサーと、それに続くアナログフロントエンド信号調整、アナログ-デジタルコンバーター(ADC)、およびデータがデジタルドメインに入る前のそのドライバーで構成されます。
最も正確な位置センサーの1つは、光学式エンコーダです。光学式エンコーダは、発光ダイオード(LED)光源、モーターシャフトに取り付けられたマーク付きディスク、および光検出器で構成されています。ディスクは、光を覆い隠したり、光を通過させたりする不透明および透明な領域のマスクされたパターンを備えています。光検出器は結果として生じる光を感知し、オン/オフ光信号は電気信号に変換されます。
ディスクが回転すると、光検出器は、ディスクのパターンと連動して、mVまたはµVレベルの小さな正弦波および余弦信号を生成します。このシステムは、アブソリュートポジション光学式エンコーダで一般的です。これらの信号は、通常はディスクリートアンプまたはアナログプログラマブルゲインアンプ(PGA)で構成されるアナログ信号調整回路に供給され、1 Vのピークツーピーク範囲まで信号を取得します。通常、ADC入力電圧範囲に適合します。最大ダイナミックレンジ用。増幅された正弦波と余弦波の各信号は、同時サンプリングADCのドライバアンプによって取得されます。
ADCは、正弦波と余弦波のデータポイントがまったく同じ時点で取得されるように、チャネルでの同時サンプリングを特徴とする必要があります。これは、その組み合わせがシャフトの位置情報を提供するためです。 ADC変換の結果は、特定用途向け集積回路(ASIC)またはマイクロコントローラーに渡されます。モーターコントローラーは、パルス幅変調(PWM)サイクルごとにエンコーダーの位置を照会し、このデータを使用して、受信した命令に基づいてモーターを駆動します。これまで、システム設計者は、制限のあるボードフットプリントに合わせるために、ADC速度またはチャネル数を交換する必要がありました。
クリックすると拡大画像が表示されます
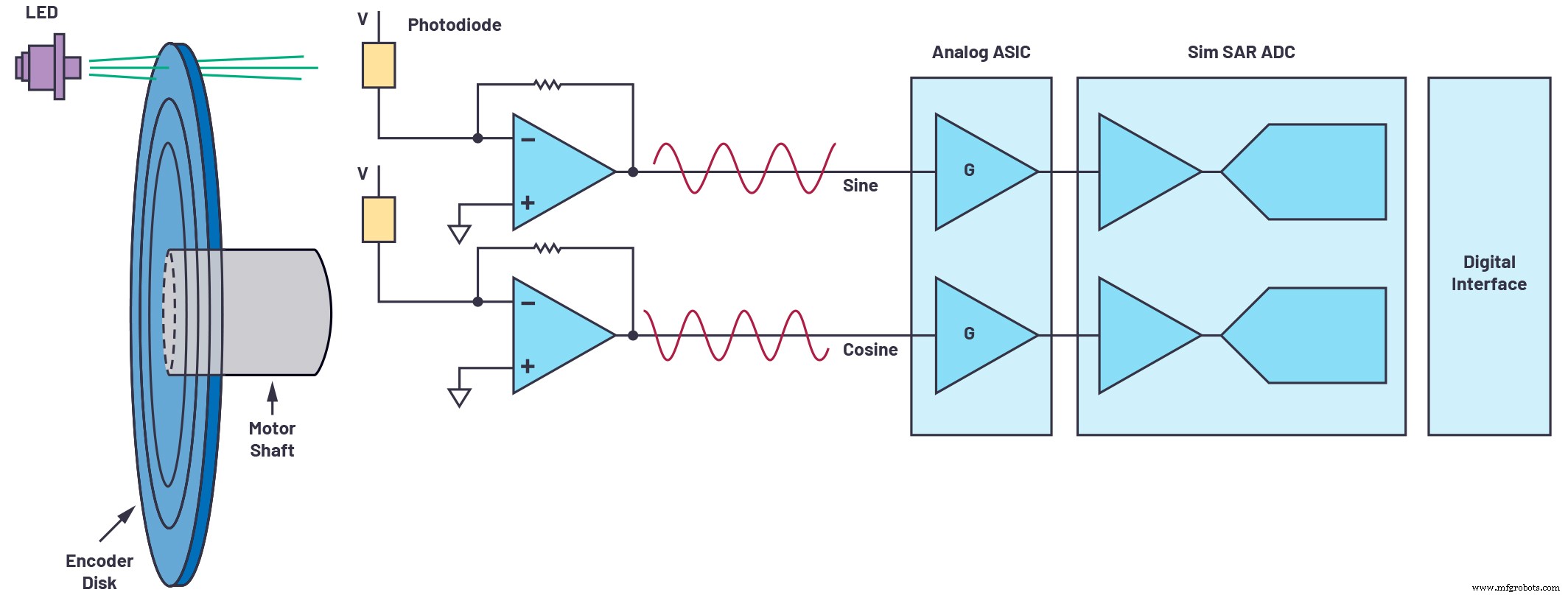
図2.位置フィードバックシステム。 (出典:Analog Devices、Inc。)
位置フィードバックの最適化
進化する技術の要求により、高精度の位置検出を必要とするモーター制御アプリケーションに革新がもたらされました。光学式エンコーダの解像度は、ディスクのファインリソグラフィから刻まれたスロットの数に基づくことができます。通常は数百または数千です。
これらの正弦波および余弦信号を高速で高性能なADCに補間することにより、エンコーダディスクにシステムを変更することなく、より高解像度のエンコーダを作成できます。たとえば、エンコーダのサインおよびコサイン信号がより遅いレートでサンプリングされる場合、図3に示すように、キャプチャされる信号の値は少なくなります。これにより、位置キャップの精度も制限されます。
クリックすると拡大画像が表示されます
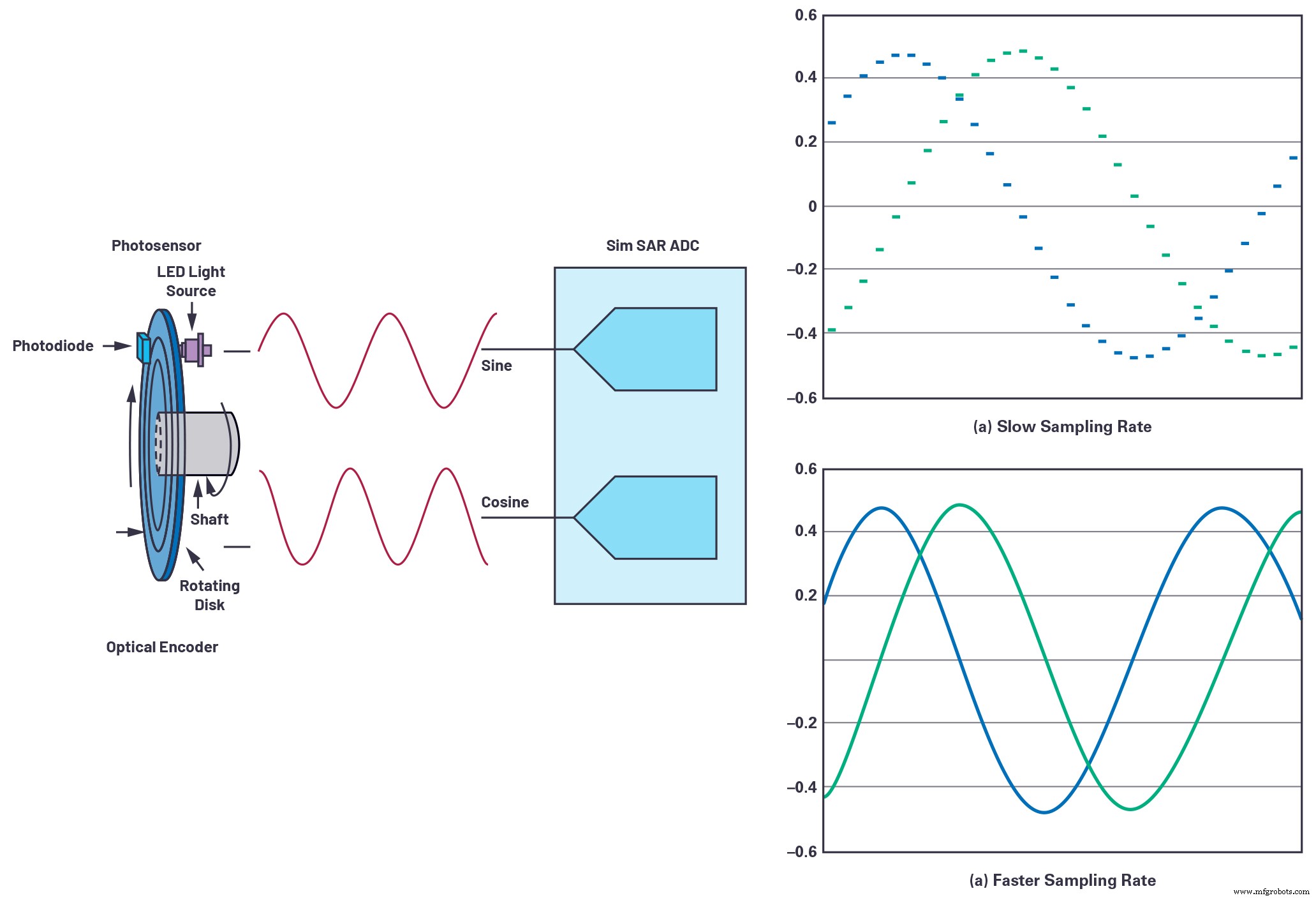
図3.サンプリングレート。 (出典:Analog Devices、Inc。)
図3では、ADCがより高速でサンプリングすると、信号のより詳細な値がキャプチャされ、より精度の高い位置が決定されます。 ADCの高速サンプリングレートにより、オーバーサンプリングが可能になり、ノイズパフォーマンスがさらに向上し、デジタル後処理の必要性がなくなります。同時に、ADCからの出力データレートを低下させます。つまり、より遅いシリアル周波数信号を可能にするため、デジタルインターフェイスが簡素化されます。モーター位置フィードバックシステムはモーターアセンブリに取り付けられており、特定のアプリケーションではかなり小さい場合があります。そのため、エンコーダモジュールの限られたPCB領域に収まるようにサイズが重要です。単一の小さなパッケージに複数のチャネルコンポーネントが登場することは、スペースの節約に最適です。
光学式エンコーダ位置フィードバックの設計例
最適化された光学式エンコーダ位置フィードバックシステムの例を図4に示します。回路は、エンコーダからの差動正弦波および余弦信号を回路でキャプチャできるアブソリュートタイプの光学式エンコーダに接続できます。図4は、ADCを駆動するADA4940-2フロントエンド、デュアルチャネル、完全差動アンプを示しています。この場合、AD7380、デュアルチャネル、16ビット、完全差動、4 MSPS、同時サンプリングSAR ADC、小型の3mm×3mmLFCSPパッケージ。
クリックすると拡大画像が表示されます
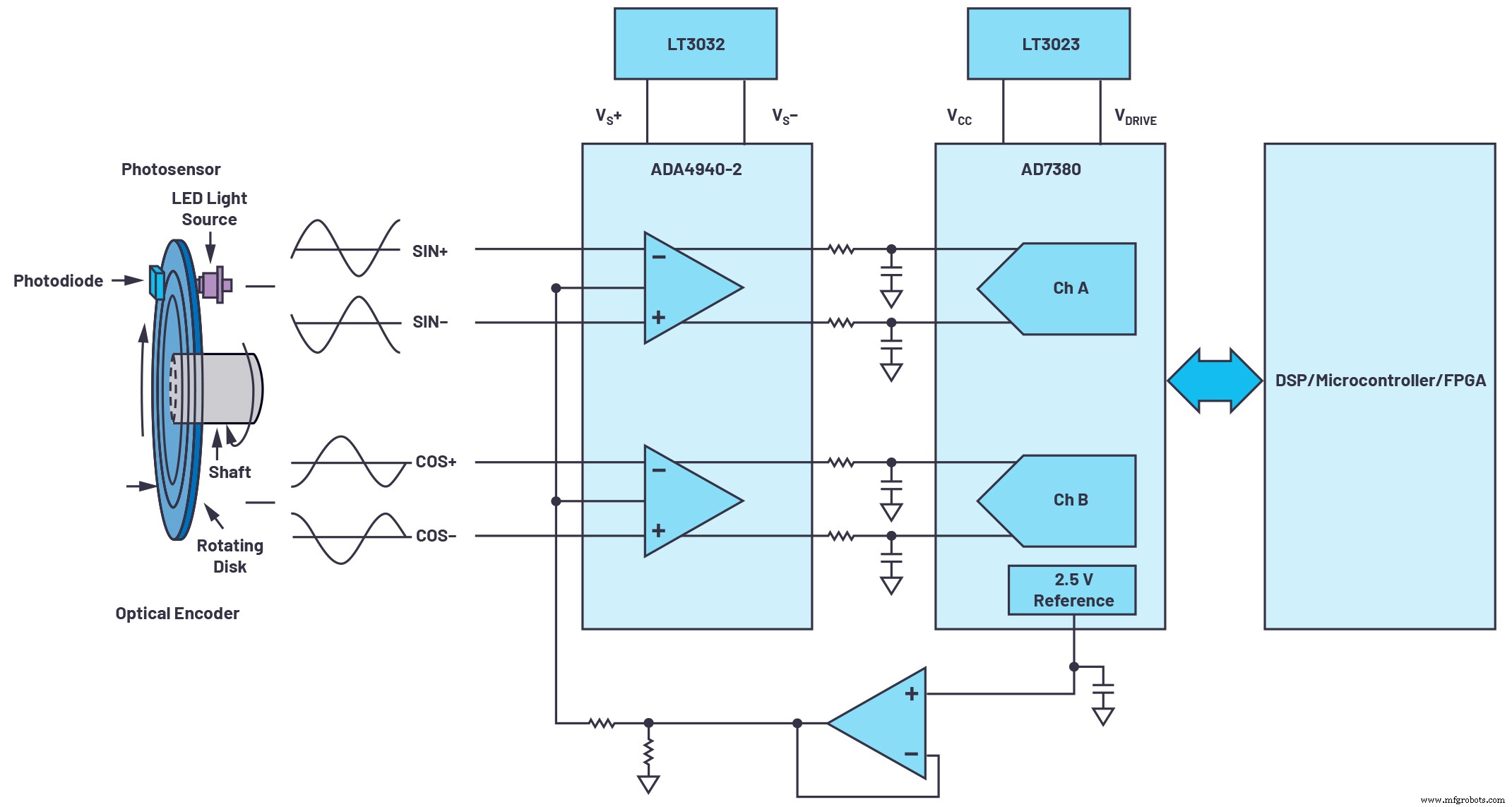
図4.最適化されたフィードバックシステムの設計。 (出典:Analog Devices、Inc。)
オンチップの2.5Vリファレンスにより、この回路の最小コンポーネント要件が可能になります。 ADCのVCCとVDRIVE、およびアンプドライバの電源レールは、LT3023やLT3032などのLDOレギュレータから電力を供給できます。これらのリファレンスデザインがインターフェースされる場合(たとえば、エンコーダディスクの1回転で正弦と余弦の1024サイクルを生成する1024スロットの光学エンコーダ)、16ビットAD7380は各エンコーダスロットを216コードでサンプリングし、エンコーダを全体的に増やします。最大26ビットの解像度。
4 MSPSスループットレートにより、詳細な正弦および余弦サイクルがキャプチャされ、エンコーダの位置が最新になります。高いスループットレートにより、オンチップでのオーバーサンプリングが可能になり、正確なエンコーダ位置をモーターに供給するデジタルASICまたはマイクロコントローラーの時間ペナルティが軽減されます。オンチップのオーバーサンプリングにより、さらに2ビットの解像度が可能になり、オンチップの解像度ブースト機能で使用できます。解像度を上げると、最大28ビットの精度をさらに向上させることができます。
モーター制御システムは、より高い精度、より高速、そして小型化に対する要求が高まっています。光学式エンコーダは、モーターの位置検出デバイスとして使用されます。これを行うには、モーターの位置を測定するときに、光学式エンコーダの信号チェーンが高レベルの精度を備えている必要があります。高速、高スループットのADCは、情報を正確にキャプチャし、モーターの位置データをコントローラーにフィードするため、位置フィードバックシステムでより高いレベルの精度と最適化が可能になります。
作者について
センサー