


AgNWsおよびMNs-PDMSに基づく柔軟な磁場センサー
要約
この論文は、サンドイッチ構造のポリジメチルシロキサン(AgNWs&MNs-PDMS)にドープされたAgナノワイヤーと磁性ナノ粒子に基づく新しい柔軟な磁場センサーを提示します。 MNは、この作業で磁場検知用の高感度ユニットとして機能します。その上、導電性ネットワークは変形中にAgNWによって作られます。磁歪は、AgNWおよびMN-PDMSセンサーの抵抗変化につながります。さらに、MNは電子の導電経路を増加させるため、変形中の初期抵抗が低くなり、結果として得られるセンサーの感度が高くなります。強調する価値のある点は、AgNWとMNの相互作用が磁場検知においてかけがえのない役割を果たしていることです。そのため、伸縮中の抵抗変化を調査しました。 MNとAgNWの質量比が1:5であるフレキシブル磁場センサーは、磁場検知実験で最高の感度24.14Ω/ Tを示しました。最後に、センサーのメカニズムを調査するために、磁歪およびピエゾ抵抗センシングモデルが確立されました。
背景
フレキシブル電子デバイスは、その容易な相互作用の長期監視機能により、最近大きな注目を集めています[1,2,3,4,5]。これらは、軽量、ポータブル、優れた電気的特性、高度な統合などの利点により、最も有望な電気センサーの1つになります[6、7、8、9、10、11]。間違いなく、ナノマテリアルは、その優れた特性、たとえば、小さなサイズ、表面効果、および量子トンネル効果のために、柔軟なセンサーにおいてかけがえのない役割を果たします[12、13、14]。ナノ材料の共鳴トンネル効果に基づいて、多くの研究は、変形によって抵抗が変化するピエゾ抵抗ひずみセンサーに焦点を合わせています[15、16、17]。ソフトひずみセンサーの主要なアプリケーションの1つは柔軟な電子スキンであるため、マルチフィクション化がセンサーの開発トレンドです。一部のレポートでは、ひずみ検知アレイに温度[18、19]および湿度[20、21]の検知モジュールを追加することを宣言しています。
ひずみ、温度、湿度の検知機能に加えて、電子皮膚検知アレイはいくつかの新しい機能を非常に必要としています。言い換えれば、より多くの機能が電子スキンをよりインテリジェントにします。新しい機能の中で、磁場検知は新しいアプリケーションです。将来的には、軟磁場センサーのみが電子皮膚のモジュールとして使用できることに言及する必要があります。軟磁場センサーを所有することは、その柔軟性と弾力性に基づいてより複雑な領域で使用することができ、一部の研究者はこの磁場に取り組んでいます[22、23、24、25、26]。 Chlaihawi etal。 H ac 用に準備されたMEフレキシブル薄膜センサー センシングアプリケーション[27]。 Jogschies etal。磁場検知用の薄いNiFe81 / 19ポリイミド層を調査しました[28]。 Tekgületal。 CoFe / Cu磁性多層膜をGMRセンサーに適用しました[29]。 Melzer etal。ホール効果に依存する柔軟な磁場センサーが報告されました[30]。多くの柔軟な光磁場センサーも研究されています[31、32、33、34]。従来の磁場検出器と比較して、柔軟な磁場センサーは適用がより便利であり、より小さく、複雑な環境での検出により適しています。しかし、多機能電子皮膚に面した軟磁場センサーに関する研究は、私たちが知る限りほとんど報告されていません。
Ag NW [35,36,37]とMN(Ni-Fe)[38、39]の優れた電子特性と磁気特性により、この論文では、柔軟なAgNWとMN-PDMS磁場センサーの設計と測定を提案します。磁歪効果とピエゾ抵抗効果に基づくサンドイッチ構造を備えています。 MNは、AgNWベースのピエゾ抵抗ひずみセンサーに磁場に敏感なユニットとして導入されました。 AgNWsとMNs-PDMSベースのセンサーの異なる磁歪変形は、異なる抵抗変動を引き起こします。ナノ材料の特性評価後、MNとAgNWの3つの異なる質量比(AgNWとMN; 1:1、1:2、1:5)を使用して、柔軟な磁場センサーを準備しました。センサーの磁場検知特性を調査する前に、抵抗の変化と伸縮の関係を調べて、MNとAgNWの相互作用を結論付けました。特性評価の結果に基づいて、この研究で得られた磁場センサーは、将来、多機能電子機器に適用することができます。
メソッド
フレキシブルセンサーの準備
MNはラテックス配合法[24、25]によって合成されました。 AgNW(長沙Weixi New Material Technology Corporation、中国から購入した長さ)の直径と長さは、それぞれ50nmと20μmです。ナノマテリアルの適切な量を調査するために、MNとAgNWのさまざまな比率が選択されました。したがって、質量比が0:1、1:5、1:2、および1:1のMNおよびAgNWは、無水エタノールに超音波分散されました。図1に、センサーの製造プロセスの概略図を示します。質量比10:1のPDMSエラストマーと架橋剤を長方形のテープを貼り付けて基板に滴下しました。 70°Cで2時間加熱した後、溝のあるPDMSを剥がして必要な形状に切断し、溝のサイズは30mm×5mmです。異なる比率のAgNWとMNの4つのサンプルが、それぞれPDMSフィルムのノッチに充填されました。両側に2つの軟銅電極を取り付け、PDMSを上部に落とし、電極とナノ材料を固定しました。 70°Cで2時間加熱した後、センサーを取得しました。
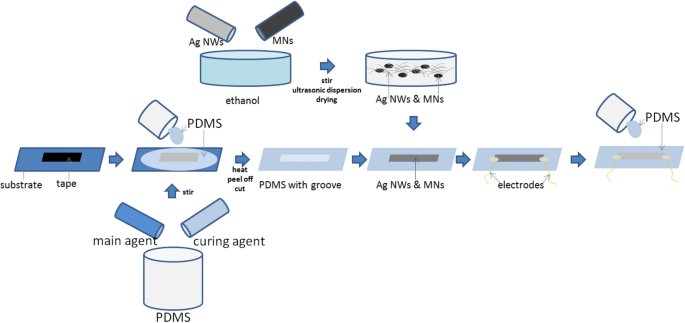
センサーの構造設計と製造プロセスのフローチャートの概略図
特性評価
異なる混合比のAgNWおよびMNは、走査型電子顕微鏡(SEM、S4700 SEM Hitachi Corporation、東京、日本)を介して特性評価されました。さまざまな質量比のAgNWおよびMNの成分は、波長1.5406ÅのCu K放射線を使用したXRD測定(Buker D8 Advance)によって特徴づけられました。
電流-電圧曲線は、Keithley 2400 Source Meterによって室温(室温は25°C)で測定されました。ストレッチング実験はストレッチングプラットフォーム(ZolixTSM25-1AおよびZolixTSMV60-1 s、Zolix Corporation、北京、中国)で実行され、センサーの抵抗はKeithley 2400 SourceMeteratによって測定されました。フレキシブルセンサーを異なる磁場に固定したときに、磁場検知実験を行いました。磁場の強さは0Tから始まり、0.1Tずつ増加します。
結果と考察
MNのXRDスペクトルを図2に示しました。特徴的なピークは、MNがFeCo、FeNi、およびCo(OH) 2 で構成されていることを示しています。 。結果は、これらすべての組成物が磁性材料であることを示しています。
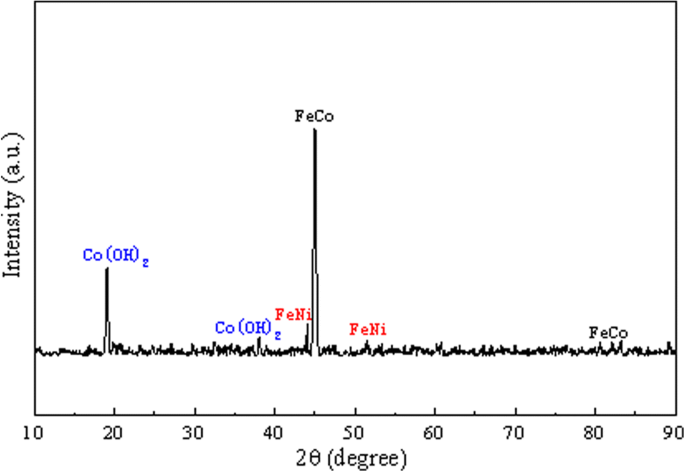
MNのXRDスペクトル
AgNWとMNのSEM画像を図3に示します。長さ20μm、直径50nmの純粋なAgNWは、図3aで観察できる線形ネットワークを形成します。図3b–dに、質量比5:1、2:1、および1:1のAgNWとMNの形態を示します。図3bでは、AgNWの中に少量のMNが見られます。図3cのネットワークは、明らかに図3a、bと比較してまばらです。さらに、AgNWとより多くのMNの曲がりが図3dに見られます。図3a〜dでは、AgNWによって構築された導電性ネットワークとMNの量が明らかに増加しています。図3a〜dに示すAg NWとMNの均一な混合は、伸縮時のセンサーの感度を高めるための接続の役割を果たします。 AgNWとMNが果たした役割は、図3の結果で説明できます。
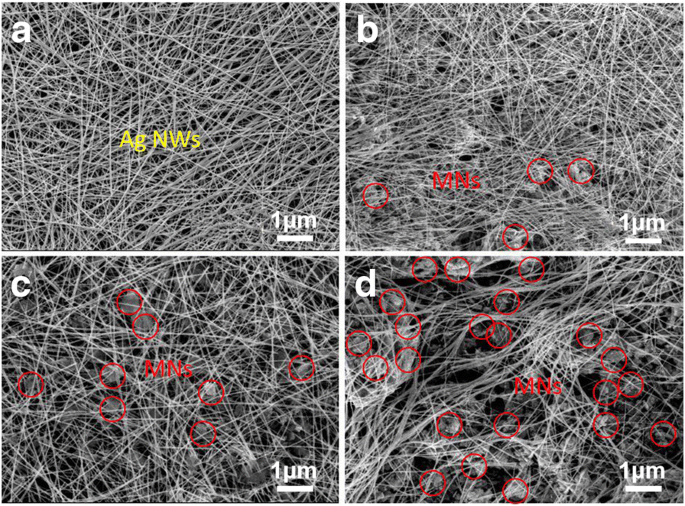
a 質量比1:0のAgNWとMN、 b 5:1、 c 2:1、および d 1:1
質量比1:0、5:1、2:1、1:1のAgNWとMNに基づくセンサーのIV曲線を図4に示します。4つの曲線はすべて滑らかな直線であり、 4つのセンサーは重要なオーム特性を示します。これらのセンサーは導電性であり、変形することなく安定していることを宣言しています。
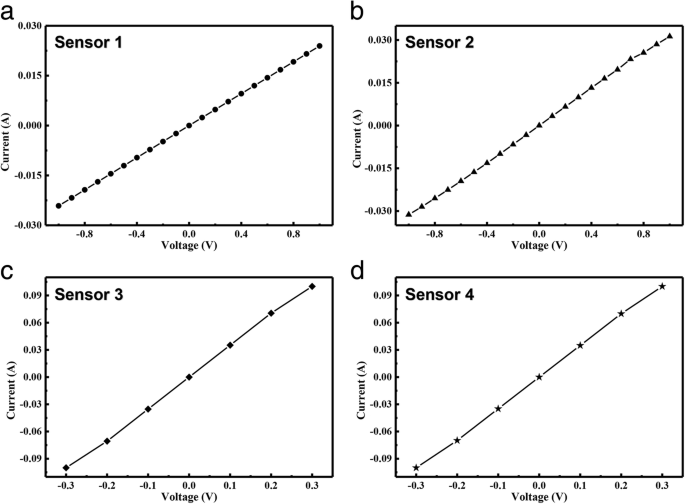
a の質量比のAgNWおよびMNに基づくセンサーのI-V曲線 1:0、 b 5:1、 c 2:1、および d 1:1
図4aから、高感度ユニットが純粋なAgNWの場合、センサーの抵抗は41.58Ωであると計算できます。図4b–dに示すように、質量比1:0、5:1、2:1、および1:1のAgNWおよびMNに基づくセンサーの抵抗は、30.2Ω、5.04Ω、および2.87Ωです。 MNが敏感な細胞に導入されたとき、それは減少する抵抗傾向を示します。 4つのセンサーの抵抗を比較すると、MNの比率が高くなると、柔軟な磁場センサーの抵抗は減少し、質量比が1:1のAgNWとMNのセンサーで最小の抵抗が発生すると結論付けることができます。また、AgNWとMNを特定の比率で混合すると、MNの導電性コンポーネントがネットワーク内の導電性パスをより多く導いたため、抵抗を減らすのに役立つことも証明できます。
変形中のMNとAgNWの間の相互作用を結論付けるために、抵抗の変化と伸縮または収縮との関係が研究されました。室温下で伸長したAgNWおよびMNベースのセンサーの相対的な抵抗変化を図5a〜dに示します。ストレッチプロセス中の抵抗の変化は黒い曲線で表され、リリースプロセス中の抵抗の変化は赤い曲線でプロットされます。 Δ R および R 0 センサーの変形と初期抵抗の下での相対抵抗変化を表し、 L 0 およびΔ L センサーの軸方向試験片の初期長さと相対伸びを表します。センサーのゲージファクターは、ゲージファクター(GF)=Δ R の式から計算できます。 / R 0 :Δ L / L 0 。図5aは、引張長さが元の長さの7.12%以内で、GFが129.6の場合、AgNWベースのセンサーが伸縮および回復プロセスで導電性であることを示しています。ストレッチ中に抵抗が増加します。これは、変形中のセンサー内のAgNW間の間隔の増加、トンネルチャネル、および導電パスの減少に起因する可能性があります。逆のプロセスにより、収縮中の抵抗が減少しました。 MNが高感度ユニットに導入されると、フレキシブルデバイスのひずみ検知特性も変化します。質量比5:1のAgNWとMNに基づくセンサーの抵抗は、ストレッチ範囲が図5bの元の長さの4.4%以内の場合、ほぼ直線的に変化します。引張長さが元の長さの3.9%を超えると、抵抗の増加が大きくなります。センサーのGFは257に増加します。これは、純粋なAgNWに基づくセンサーと比較してセンサーの感度が増加したことを意味します。ただし、ひずみ範囲は、5:1の質量比にMNが参加しても改善されません。これは、図5a、bで確認できます。図5cは、2:1の質量比のAgNWとMNに基づくセンサーの抵抗が、伸縮範囲が元の長さの8.7%以内で、センサーのGFが264.4である場合に直線的に変化することを示しています。これは、質量比1:0および5:1のAgNWおよびMNに基づくセンサー。図5dでは、1:1の質量比のAgNWとMNに基づくセンサーの抵抗は、伸縮範囲が元の長さの9%以内になると直線的に変化します。引張長さが元の長さの9%を超えると、抵抗が大幅に変化し、GFは222.2になります。要約すると、2:1の質量比のAgNWとMNに基づくフレキシブル磁場センサーは、264.4の最大のGFを示し、比較的広い伸縮範囲を持っています。さらに、このセンサーは、ストレスが増加するにつれてより敏感に応答し、抵抗の変化もより良い線形関係を持ちます。 MNの主成分は導電性合金であるFeCoです。これらの4種類のセンサーを比較すると、MNの参加が多いほど、ストレッチ中の敏感なユニットの導電性パスが多くなります。ただし、同じ品質のAg NWとMNのMNの比率が高いということは、Ag NWの存在量が少ないことを意味し、変形中の導電性ネットワークの安定性に悪影響を及ぼします。これが、9%の変位での相対抵抗の急落の理由です。したがって、質量比1:1のAgNWとMNは、この作業で設計したMNの最大量であり、質量比1:1未満のAgNWとMNに基づくセンサーは、伸長するとすぐに非導電性になります。図5の結果は、特定の比率でのAgNWとMNの相乗効果により、感度とひずみ範囲が向上することを示しています。
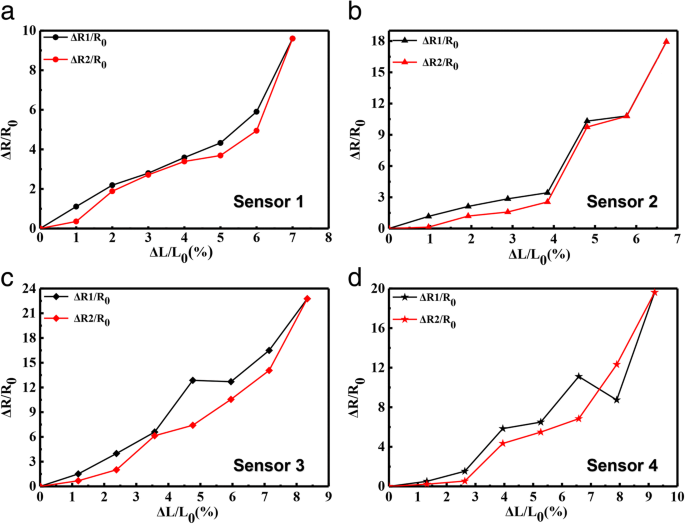
a の質量比でのAgNWとMNに基づくセンサーの相対抵抗変化 1:0、 b 5:1、 c 2:1、および d 変形あり1:1
MNは磁場の下で接近する可能性があるため、磁歪によってセンサーが収縮する可能性があります。収縮中のセンサーにおけるAgNWとMNの相互作用を特徴づけるために、収縮中の抵抗変化を測定し、実験結果を図6に示します。図6aは、AgNWベースのセンサーが収縮長が元の長さの1.6%以内で、最大GFが13.75の場合、収縮と回復。 PDMSに埋め込まれたAgNWは、収縮プロセス中に互いに接触し、伝導経路の増加につながります。したがって、収縮力が増加するにつれて抵抗は減少します。センサー内のAgNW間の間隔が狭くなると、重なり合うナノワイヤーが増え、センサーの抵抗が減少します。 MNをAgNWに導入したとき、図6bは、質量比5:1のAgNWとMNに基づくフレキシブルデバイスの収縮特性を示しています。センサーの抵抗は、収縮範囲が元の長さの2.5%で変化し、最高のGFは24です。実質的に、同じ抵抗の変化は、質量比2:1のAgNWとMNに基づくセンサーにも当てはまります。 1:1、これは図6c、dに示されています。センシティブユニットのMNの質量比を大きくすると、収縮範囲が元の長さの1.6%以内で、GFが21.875になると、質量比2:1のAgNWとMNに基づくセンサーの抵抗が変化します。同時に、質量比1:1のAgNWとMNに基づくセンサーの抵抗も、収縮範囲が元の長さの2.8%以内で、GFが20.35のときに減少しました。収縮時の質量比5:1のAgNWとMNに基づくセンサーの抵抗変化は、他の3つのセンサーよりも大きく、感度が最大であると結論付けることができます。伸展プロセスとは異なり、収縮の長さが長くなると、すべてのセンサーの抵抗が減少します。質量比のAgNWとMNが5:1の場合、センサーは収縮プロセス中に最も高い感度係数を持ち、その最高のGFは24です。図6a–dと比較すると、MNの量が少ないほど、導電パスを接続しやすくなります。図5の結果とは逆に、収縮として移動する材料のスペース。したがって、質量比5:1のAgNWとMNに基づくセンサーのGFは、収縮時に最も高くなります。図6の結果は、AgNWとMNの比率が大きい場合に相乗効果が発生することを示しています。
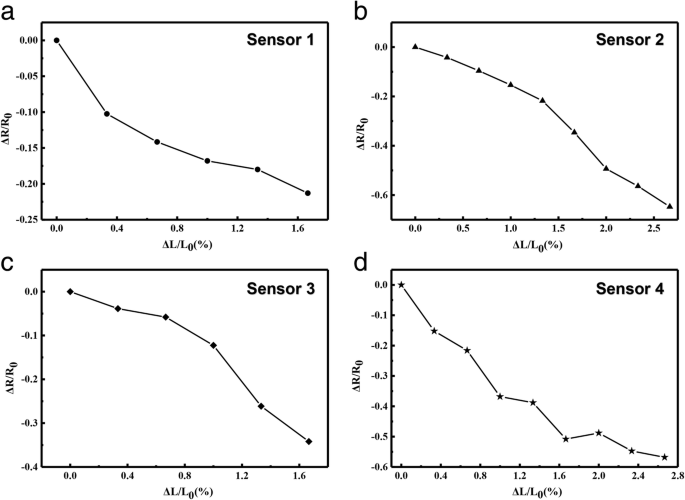
a の質量比でのAgNWとMNに基づくセンサーの相対抵抗変化 1:0、 b 5:1、 c 2:1、および d 収縮あり1:1
さまざまな磁場でのさまざまな柔軟な磁気センサーの抵抗変化を図7に示します。AgNWベースのセンサーの抵抗は41.58Ωです。図7aに示すように、純粋なAgNWに基づくセンサーを徐々に増加する磁場に置き、それに応じてセンサーの抵抗が振動するにつれて変化します。金属材料の磁歪効果により、センサーの抵抗がわずかに変化します。磁場の強さが0.4Tのときの最大抵抗変化率は0.037です。図7bに示すように、磁場の強さが増加すると、質量比5:1のAgNWとMNに基づくセンサーの抵抗も減少します。 MNのないセンサーと比較して、磁場の変化を伴う5:1の質量比のAgNWとMNに基づくセンサーの抵抗変化はより明白です。磁場の強さが0.4Tの場合、最大抵抗変化率は0.28です。図7c、dでは、質量比が2:1と1:1のAgNWとMNに基づくセンサーへの同じアプリケーションであり、磁場が増加すると抵抗の変化はそれぞれ0.14と0.19になります。質量比5:1のAgNWとMNに基づくセンサーの感度が最も高く、磁場による連続的な抵抗の変化を図8に示しました。さまざまな比率に基づくひずみセンサーのパラメーターの比較MNとAgNWの数を表1に示します。
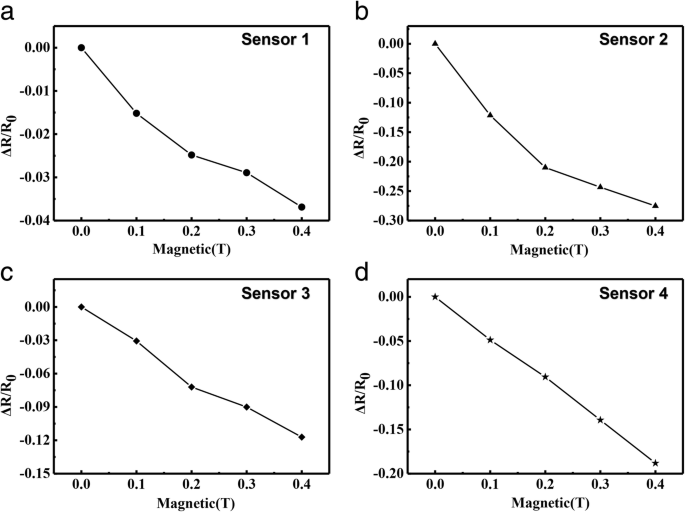
さまざまな磁場で抵抗が変化します
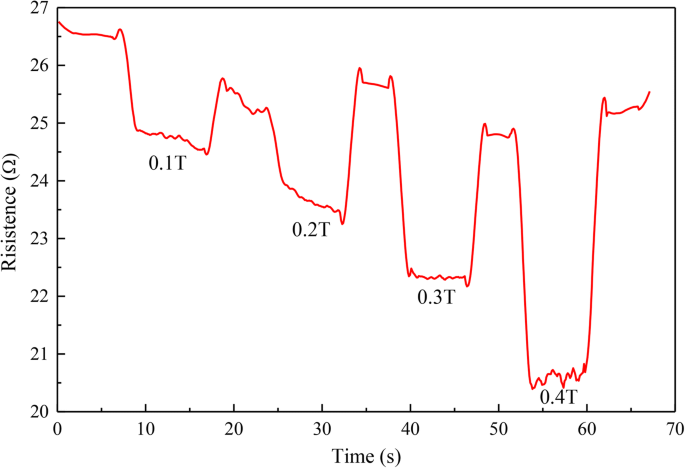
抵抗と異なる磁場の関係
磁場センサーの感度は24.14Ω/ Tと計算できます。結論として、MNとAgNWの質量比が1:5の場合、変化する磁場に対するセンサーの応答は、24.14Ω/ Tの感度で最も感度が高くなります。この研究で得られた柔軟な磁場センサーは、磁場の強さの検出にさらに適用することができます。このアプリケーションのテスト結果は、図1および2の結果を比較した場合のセンサーの収縮プロセスに対応しています。これは、センサー内のナノ材料が磁場に置かれたときに一緒に移動することを意味します。メカニズム分析では、次のように詳細に宣言しています。
さまざまな磁場強度でのセンサーの抵抗変化を理解するために、図9に示すように、センサーの動作原理を説明する簡単なモデルを提案します。PDMS内の多数のAgNWとMNが導電性ネットワークを形成します。磁場のないAgNWとMNによって形成される導電経路は、図9aに赤い線で示されています。 MNは、磁場下で均一に配置される傾向があります。これを図9bに示します。ただし、MNの位置変更には小さなスペースがあるため、磁力線によってMNの方向のみが変更されます。より高い磁場強度は、AgNWのネットワーク制約を克服できるMNのより大きな力を表します。 MNの移動方向により、Ag NWが集まります。これが、導電性パスの数が増加する理由です。より多くの導電性経路はより多くの電子移動を意味し、それはより低い抵抗につながります、抵抗はこのように磁場強度の増加とともに減少します。
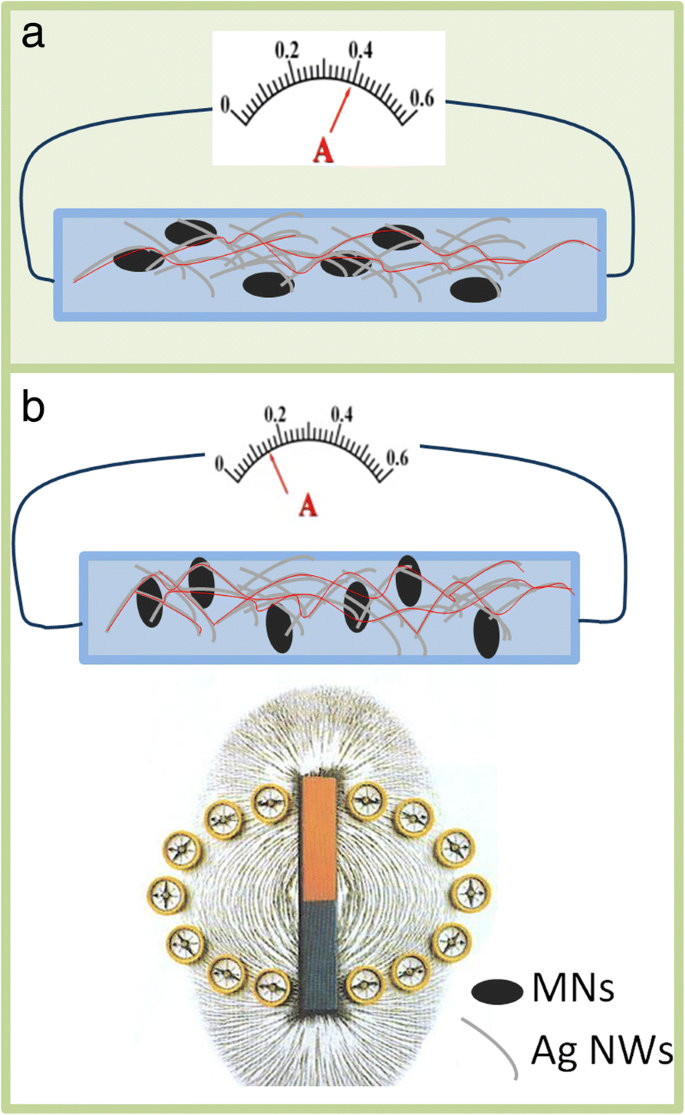
AgNWおよびMNの概略センシングモデル-PDMSベースの軟磁場センサー
結論
この論文で設計されたデバイスは、フレキシブルエレクトロニクスの開発動向に適合しています。この研究では、サンドイッチ構造のAgNWs&MNs-PDMSに基づく柔軟な磁場センサーを研究しました。 SEMおよびXRDの特性評価に基づいて、ナノマテリアルのさまざまな比率の成分と形態が決定されました。次に、AgNWとMNに基づくセンサーの電流-電圧曲線と抵抗変化を、それぞれ1:0、5:1、2:1、1:1の質量比で伸縮させて測定しました。変形中のAgNWとMNの間の相互作用は、特性評価の結果から結論付けられました。次に、MNとAgNWの異なる質量比に基づくセンサーを磁場検知特性について調査しました。 AgNWとMNの質量比が5:1の場合、準備されたままのセンサーは24.14Ω/ Tの最高感度を示します。実験結果は、磁場強度が増加するにつれてセンサーが収縮することを示しています。さらに、このセンサーのメカニズムを調査するために、磁歪およびピエゾ抵抗センシングモデルが確立されました。
略語
- AgNWs:
-
Agナノワイヤー
- GF:
-
ゲージファクター
- MN:
-
磁性ナノ粒子
- PDMS:
-
ポリジメチルシロキサン
- SEM:
-
走査型電子顕微鏡
- XRD:
-
X線回折
ナノマテリアル