


LiDARシステムでの波長選択の理解
LiDARにはさまざまな種類があります。自動車産業に携わる人々は、それぞれの相対的な長所と短所を認識している必要があります。
先進運転支援システム(ADAS)と自動運転(AD)は、自律航法を可能にするアルゴリズムにフィードする車両を取り巻く環境を効果的に検知することで成功できることが広く認識されています。ライフクリティカルな状況でのセンシングへの絶対的な依存を考えると、複数のセンサーモダリティが使用され、データが融合されて相互に補強し、冗長性を提供します。これにより、各テクノロジーがその強みを発揮し、より適切に組み合わされたソリューションを提供できるようになります。
今後ADASおよびADの車両で使用されるセンサーで目立つ3つのモダリティは、イメージセンサー、レーダー、およびLiDAR(光検出および測距)です。これらのセンサーにはそれぞれ独自の長所があり、データを提供する完全なセンサースイートを組み合わせて、自律知覚アルゴリズムがセンサーフュージョンで意思決定を行えるようにすることができます。シーン。
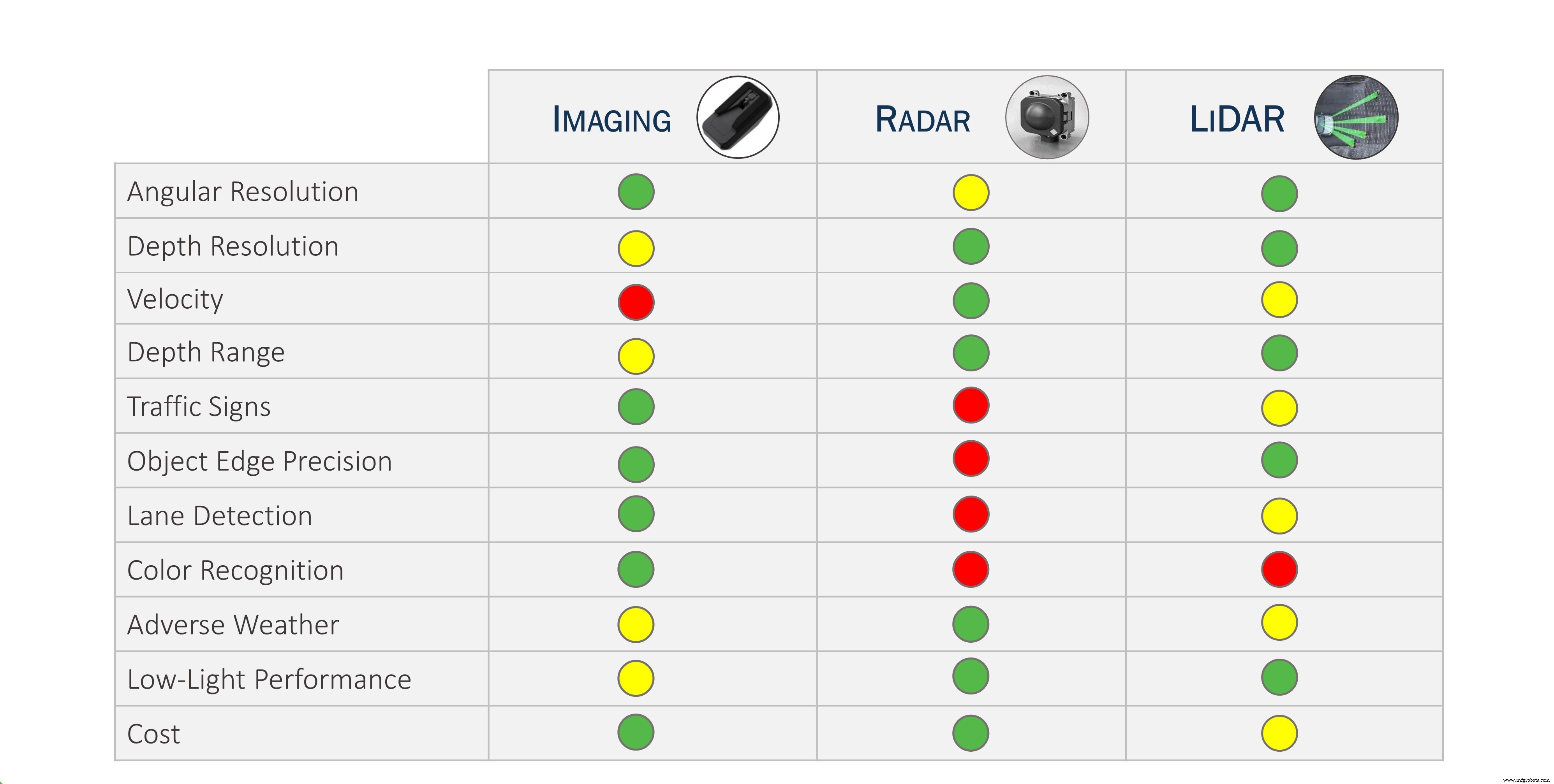
図1:センサーフュージョンは、各モダリティの長所を利用して、車両の周囲に関する完全な情報を提供します。
これらの3つの主要なモダリティのうち、距離を測定するために光を使用するという概念は数十年前にさかのぼりますが、LiDARはマスマーケットでの使用のために商業化される最も初期の技術です。 YoleDéveloppementによると、自動車用LiDARの市場は、完全なセンサースイートを必要とする自律システムの急増に牽引されて、2020年の3900万ドルから2025年には17.5億ドルと予測される目覚ましい成長を示すと見込まれています。機会が非常に大きいため、LiDARテクノロジーに取り組んでいる企業は100社をはるかに超えており、これらの企業への累積投資額は2020年までに15億ドルを超えます。これは、SPAC主導の新規株式公開が一握り以上行われる前のことです。 2020年後半に始まったLiDAR企業。しかし、単一の技術に取り組んでいる企業が非常に多い場合(使用されている光の波長(905nmと1550nmなどの著名な例)など、根本的に異なる企業もあります)、ネットワーキング用のイーサネットであろうとビデオ用のVHSであろうと、何度も見られるように、勝利を収めるテクノロジーと統合になります。
LiDARテクノロジーのユーザー、つまり自動車メーカーと、人や物を輸送するための自律型ロボット車両を設計および製造する企業を見ると、彼らの頭の中で最も重要なことは彼らの要件です。最終的に、これらの企業は、低反射物体の測距と検出の性能仕様を満たしながら、低コストで信頼性の高いLiDARセンサーをサプライヤーに提供することを望んでいます。すべてのエンジニアは強力な視点を持っていますが、サプライヤが適切なコストでパフォーマンスと信頼性の要件を満たすことができれば、これらの企業はテクノロジの実装にとらわれない可能性があります。そして、それはこの記事が解決を助けることを目的としているという根本的な議論につながります:自動車のLiDARアプリケーションにはどの波長が普及するのでしょうか?
LiDARの概要
この質問に対処するには、さまざまなアーキテクチャが存在するLiDARシステムの構造を理解する必要があります。コヒーレントLiDARは、周波数変調連続波(FMCW)と呼ばれるタイプで、送信されたレーザー信号と反射光を混合して、オブジェクトの範囲と速度を計算します。 FMCWにはいくつかの利点がありますが、最も一般的なLiDARアプローチである直接飛行時間(dToF)LiDARと比較すると、比較的まれなままです。この実装では、照明源から送信された非常に短い光パルスがオブジェクトで反射されてセンサーによって検出されるまでにかかる時間を計ることにより、オブジェクトまでの距離を測定します。光速を使用して直接 時間、速度、距離に関連する簡単な数式を使用して、オブジェクトまでの距離を計算します。典型的なdToFLiDARシステムには、6つの主要なハードウェア機能がありますが、波長の選択は主に送信機能と受信機能に影響を与えます。
クリックしてフルサイズの画像を表示
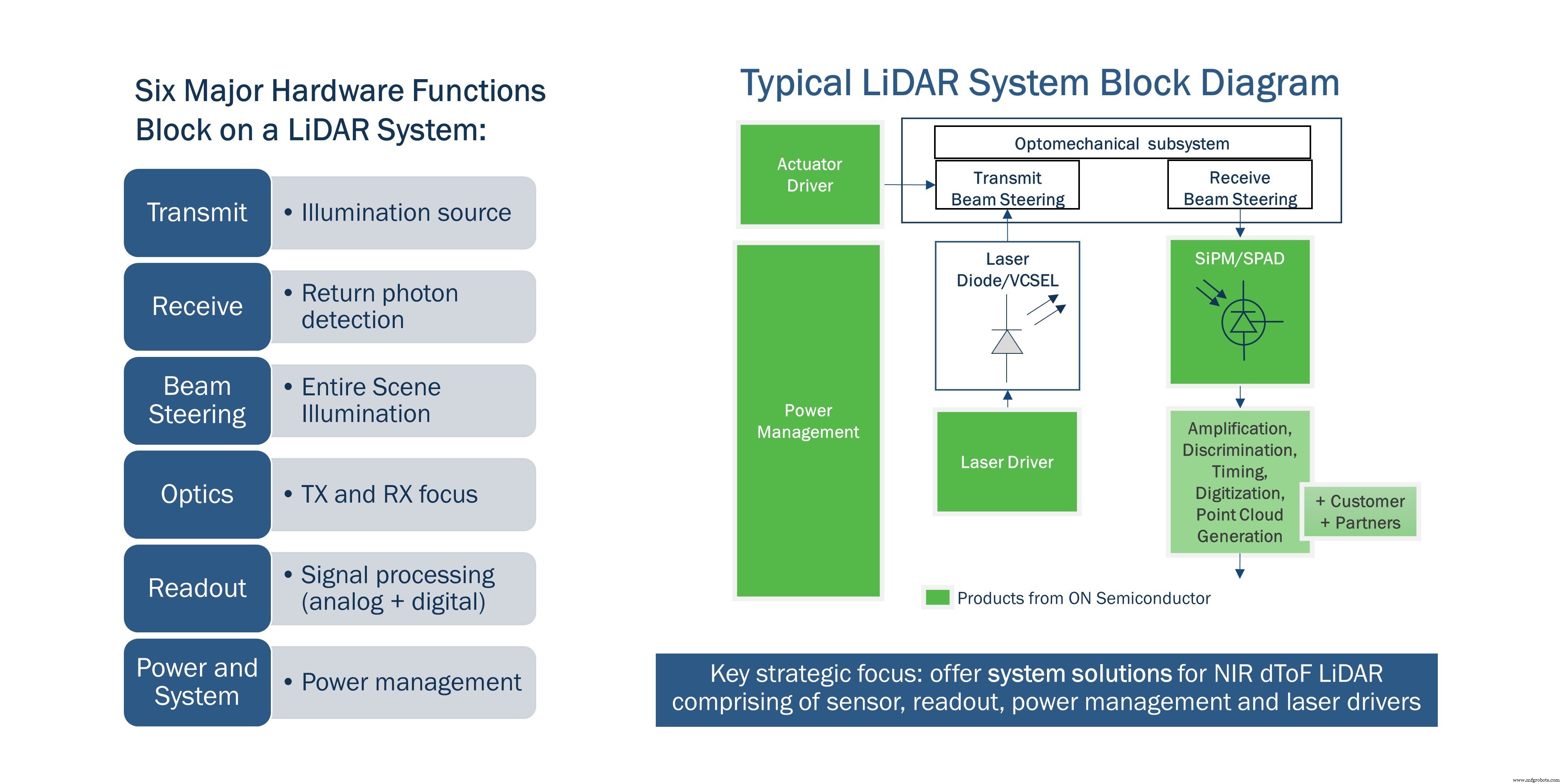
図2:オンセミコンダクター製品のいくつかの重点分野を表す緑色の部分がある典型的なdToFシステムのブロック図。
表1は、既知の自動車用Tier-1から世界中のすべての地域の新興企業に至るまでのさまざまなLiDARメーカーのリストを示しています。市場レポートと公開情報に基づくと、これらの企業の大多数は、短波赤外線(SWIR)波長ではなく、近赤外線(NIR)波長でLiDARを運用しています。さらに、FMCWに取り組んでいるSWIRに焦点を当てたサプライヤはこれらの波長に制限されていますが、直接飛行時間を実装しているサプライヤのほとんどは、NIR波長を使用してシステムを作成するためのパスを持っており、ビームステアリングや信号処理などの機能に関する既存のIPの多く。
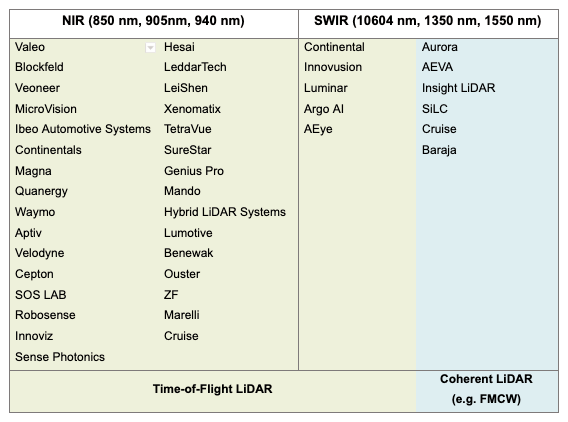
表1:NIRおよびSWIR波長で動作するLiDARメーカーのリスト。包括的なリストではありません。 (画像ソース:Yole、IHS Markit、および公開情報)
すべてではありませんが、これらのメーカーの大多数がNIR波長を選択していることを考えると、どのようにしてこの決定に至ったのか、そしてどのような影響があるのかを考慮する必要があります。議論の中心は、LiDARで使用されるコンポーネントを構成する光と半導体材料の特性に関連するいくつかの基本的な物理学です。
LiDARシステムのレーザーによって発射された光子は、物体に当たって跳ね返り、検出器によって受信されることを目的としており、太陽から来る周囲の光子と競合する必要があります。太陽放射のスペクトルを見て、大気吸収を考慮に入れると、システムのノイズとして存在する光子の量を減らす特定の波長での放射照度に「ディップ」があります。 905nmでは、1550nmよりも約3倍の日射量があります。つまり、NIRシステムは、センサーに干渉する可能性のあるより多くのノイズに対処する必要があります。ただし、これはLiDARシステムの波長を選択する際に考慮すべき要素の1つにすぎません。
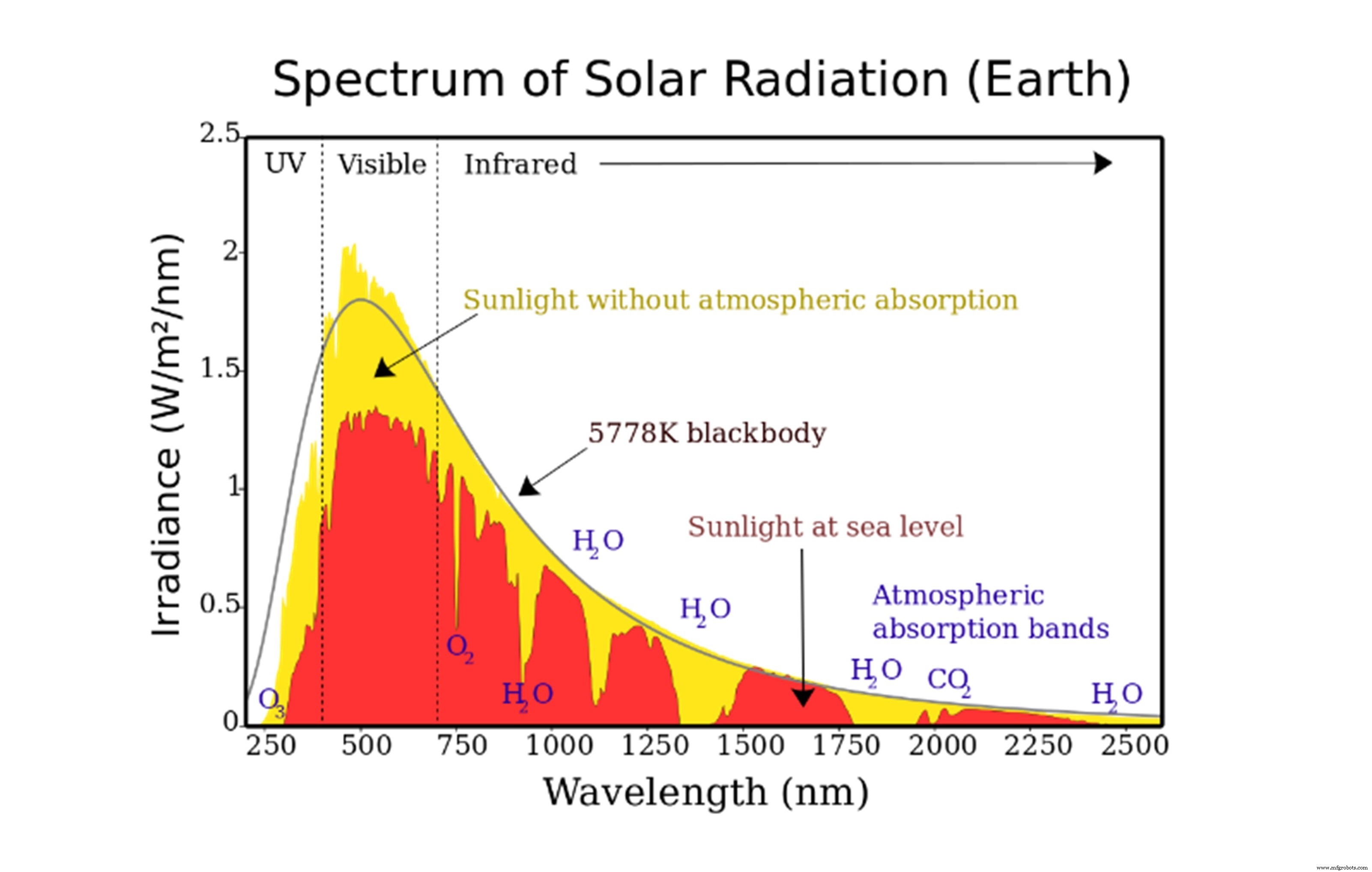
図3:大気中の光の吸収により、明確なピークが得られます。
センサー
LiDARシステムで光子を検出するコンポーネントはさまざまなタイプの光検出器であるため、検出する波長に応じてさまざまな半導体材料で構成されている理由を説明することが重要です。半導体では、バンドギャップが価電子帯と伝導帯を分離します。光子は、電子がそのバンドギャップを克服して半導体を導電性にするのを助けるエネルギーを提供し、それによって光電流を生成します。すべての光子のエネルギーはその波長に関連し、半導体のバンドギャップはその感度に関連しています。これが、検出される光の波長に応じて異なる半導体材料が必要になる理由です。製造するのに最も一般的で最も安価な半導体であるシリコンは、約1000nmまでの可視およびNIR波長に応答します。 SWIR範囲を超える波長を検出するには、よりエキゾチックなIII / V族半導体の合金化を行って、1000nmから2500nmまでの光の波長を検出できるInGaAsのような材料を作成できます。
初期のLiDARは、センサーとしてPINフォトダイオードを使用していました。 PINフォトダイオードには固有のゲインがないため、弱い信号を簡単に検出することはできません。アバランシェフォトダイオード(APD)は、今日LiDARで使用されている最も顕著なタイプのセンサーであり、適度なゲインを提供します。ただし、APDは、光子の到着からの信号を統合するためにPINフォトダイオードのように線形モードで動作する必要があり、非常に高いバイアス電圧を必要とする一方で、部品間の均一性が低いという問題もあります。 LiDARでますます使用される最新のタイプのセンサーは、単一光子アバランシェダイオード(SPAD)に基づいて構築されています。これは、非常に大きなゲインを持ち、検出されたすべての単一光子から測定可能な電流出力を生成できます。シリコン光電子増倍管(SiPM)は、シリコンベースのSPADのアレイであり、生成された信号の振幅を調べることで、単一光子と複数光子を区別できるという利点があります。
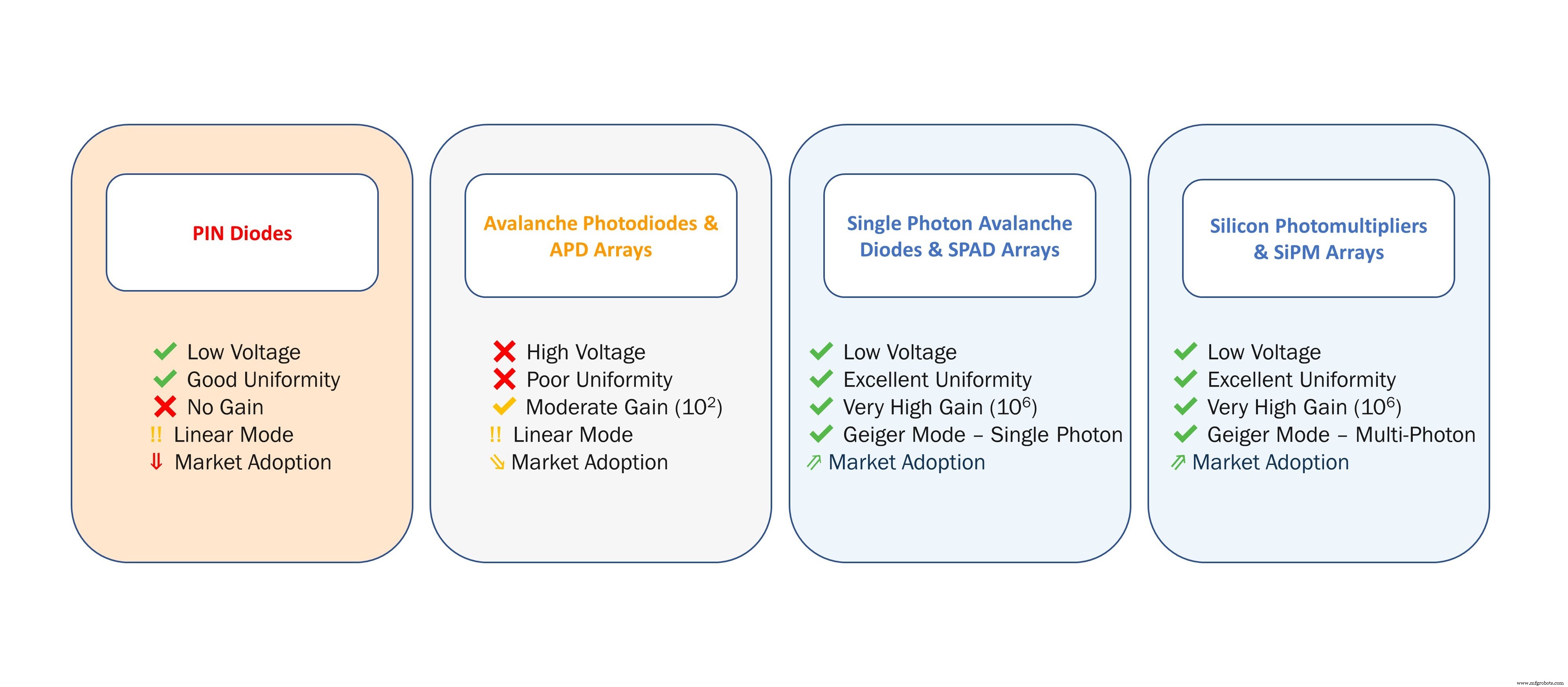
図4:LiDARの信号を検出するために使用されるさまざまなタイプの光検出器
波長のトピックとの関連性に戻ると、これらのタイプの光検出器はすべて、シリコン(NIR検出用)またはIII / V半導体(SWIR検出用)上に構築できます。一方、製造可能性とコストは技術の実行可能性の鍵であり、CMOSシリコンファウンドリはそのようなセンサーの大量かつ低コストの製造を可能にします。これが、パフォーマンスの向上に加えて、LiDARにSiPMがますます採用される主な理由です。 SWIR用のAPDとSPADは存在しますが、プロセスがシリコンベースではないため、これらを読み出しロジックと統合することは困難です。最後に、SWIR用のIII / VベースのSPADアレイと光電子増倍管(SiPMに類似)はまだ商品化されていないため、エコシステムの可用性はNIR波長に有利です。
レーザー
フォトンの生成には、まったく異なるプロセスが含まれます。利得媒体としての半導体p-n接合を使用して、レーザーを作成できます。これは、接合部に電流を流すことによって行われ、原子がより低いエネルギー帯域に移動するときに光子の共鳴放出を引き起こし、コヒーレントなレーザービーム出力をもたらします。半導体レーザーは、GaAsやInPなどの直接バンドギャップ材料に基づいており、シリコンなどの間接バンドギャップ材料とは異なり、原子が低エネルギーバンドに移動するときに発生する光子の生成に効率的です。
LiDARで使用されるレーザーには、主に2つのタイプがあります。エッジ発光レーザー(EEL)と垂直共振器面発光レーザー(VCSEL)です。 EELは、VCSELよりも低コストで出力効率が高いため、今日ではより広く使用されています。それらはパッケージ化してアレイに組み込むのがより困難であり、温度による波長シフトにも悩まされ、検出器はより広い帯域の光子波長を探す必要があり、ノイズとしてより多くの周囲光子も検出できるようになります。より高いコストとより低い電力効率にもかかわらず、新しいVCSELテクノロジーには、ビームが上部から生成されるため、簡単で効率的なパッケージングという利点があります。コストが大幅に減少し続け、電力効率が向上するため、VCSELの市場での採用は増加しています。 EELとVCSELは、NIRとSWIRの両方の波長生成に存在しますが、重要な違いがあります。NIR波長はGaAsで生成できますが、SWIR波長ではInGaAsPを使用する必要があります。 GaAsレーザーは、より大きなウェーハサイズのファウンドリを使用できるため、コストを削減できます。これも、コストとサプライチェーンのセキュリティの両方の観点から、NIRLiDARメーカーのエコシステムに利点があることを示しています。
クリックしてフルサイズの画像を表示
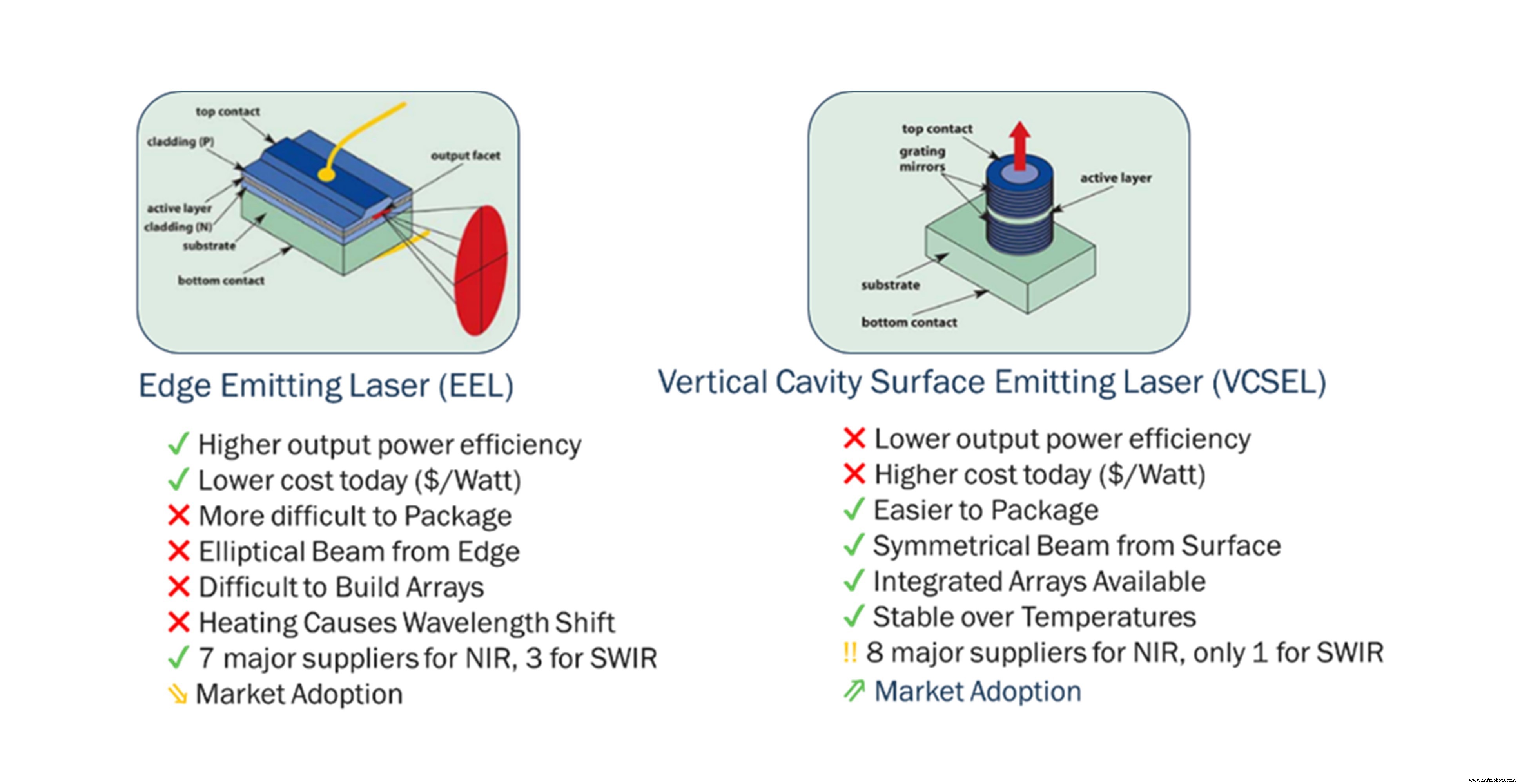
図5:LiDARで使用されるさまざまなタイプのレーザー。
レーザーパワーと目の安全性
波長の議論について話している間、LiDARシステムの目の安全性への影響を考慮することが不可欠です。 dToF LiDARの概念には、特定の画角にわたって高いピークパワーを持つ短いレーザーパルスを使用してシーンに放出することが含まれます。 LiDARの放射経路の経路に立っている歩行者は、レーザーがその方向に発射されても目が損傷しないことを保証する必要があります。IEC-60825は、さまざまな場所での最大許容露光量を規定する仕様です。光の波長。 NIR光は、可視光と同様に角膜を通過して人間の目の網膜に到達することができますが、SWIR光はほとんど角膜内で吸収されるため、より高いレベルで露光することができます。
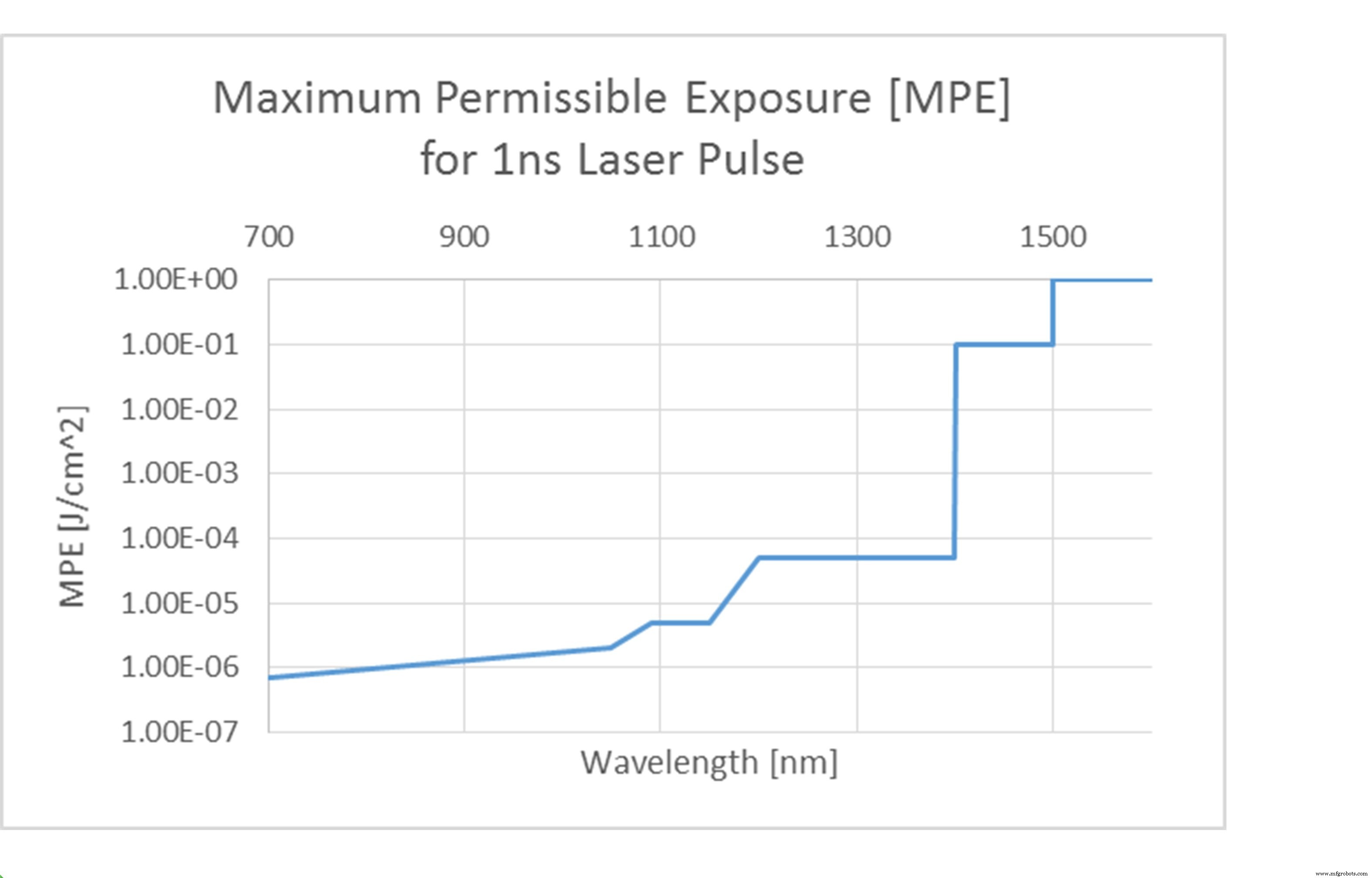
図6:アイセーフレーザー露光のIEC-60825仕様。
1550nmベースのシステムでは、より多くの光子を送信して検出に戻すことができるため、数桁高いレーザー出力を出力できることは、パフォーマンスの観点から有利です。ただし、より高いレーザー出力には、熱的なトレードオフも伴います。パルスあたりのエネルギーとレーザー開口のサイズを明確に考慮して、波長に関係なく適切なアイセーフ設計を行う必要があることに注意してください。 905nmベースのLiDARを使用すると、図7に示すように、これらの要因のいずれかによってピーク電力を増加させることができます。
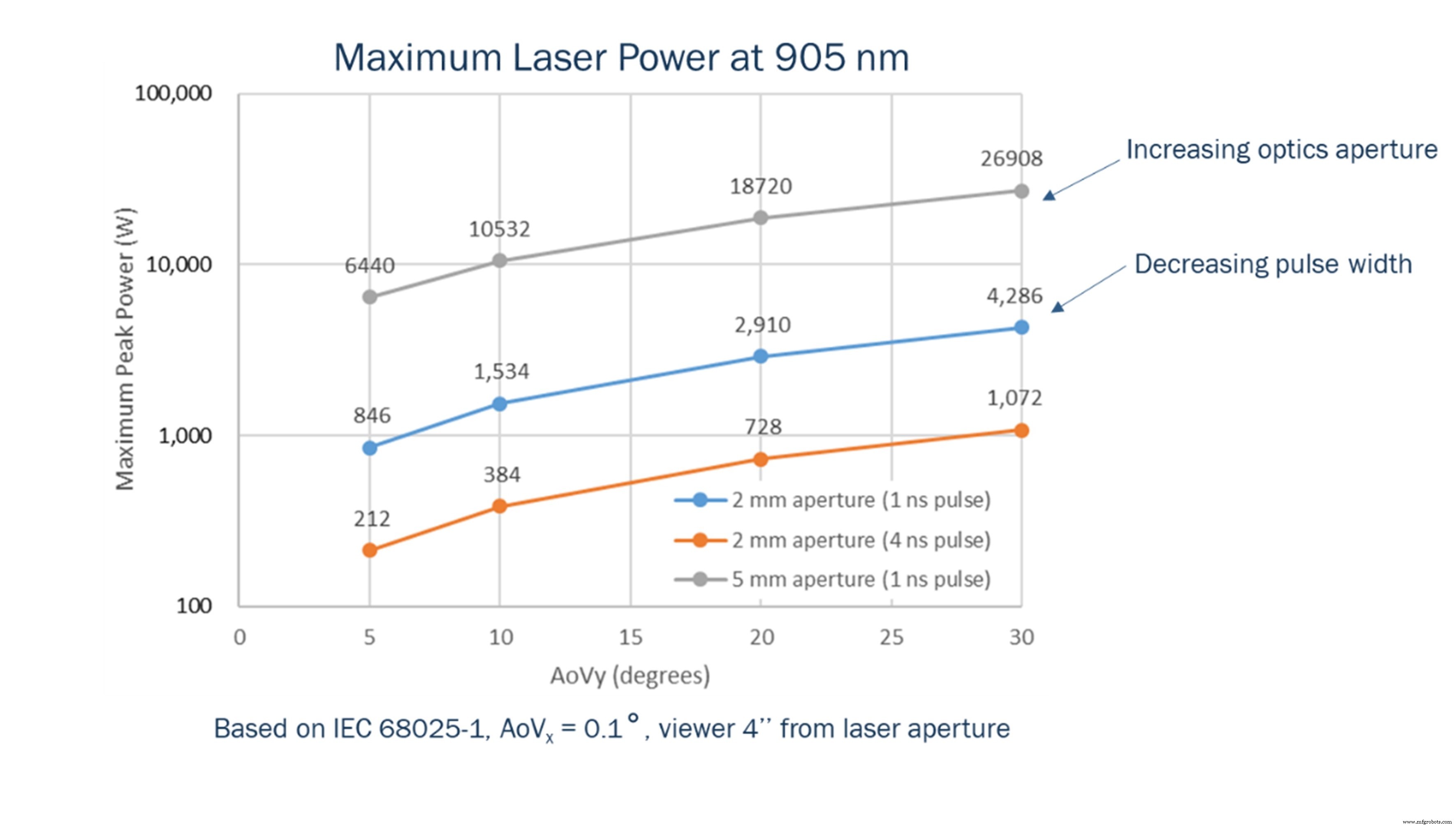
図7:さまざまな光学系とレーザーパラメータが与えられたNIRLiDARのアイセーフレーザー設計。
NIRシステムとSWIRLiDARシステムの比較
出力できるレーザー出力の量に上記の焦点を当てると、使用されているセンサーに戻ります。弱い信号を検出できる高性能センサーは、より長い範囲を達成できる、または同じ範囲を達成するためにより少ないレーザー出力を使用できるという点で、システムに複数の点で明らかにメリットがあります。オン・セミコンダクターは、最新のRDMシリーズセンサーを使用して、光子検出効率(PDE)(感度を示す重要なパラメーター)を市場をリードする18%に駆動するNIRLiDAR用の一連のSiPMを開発しました。
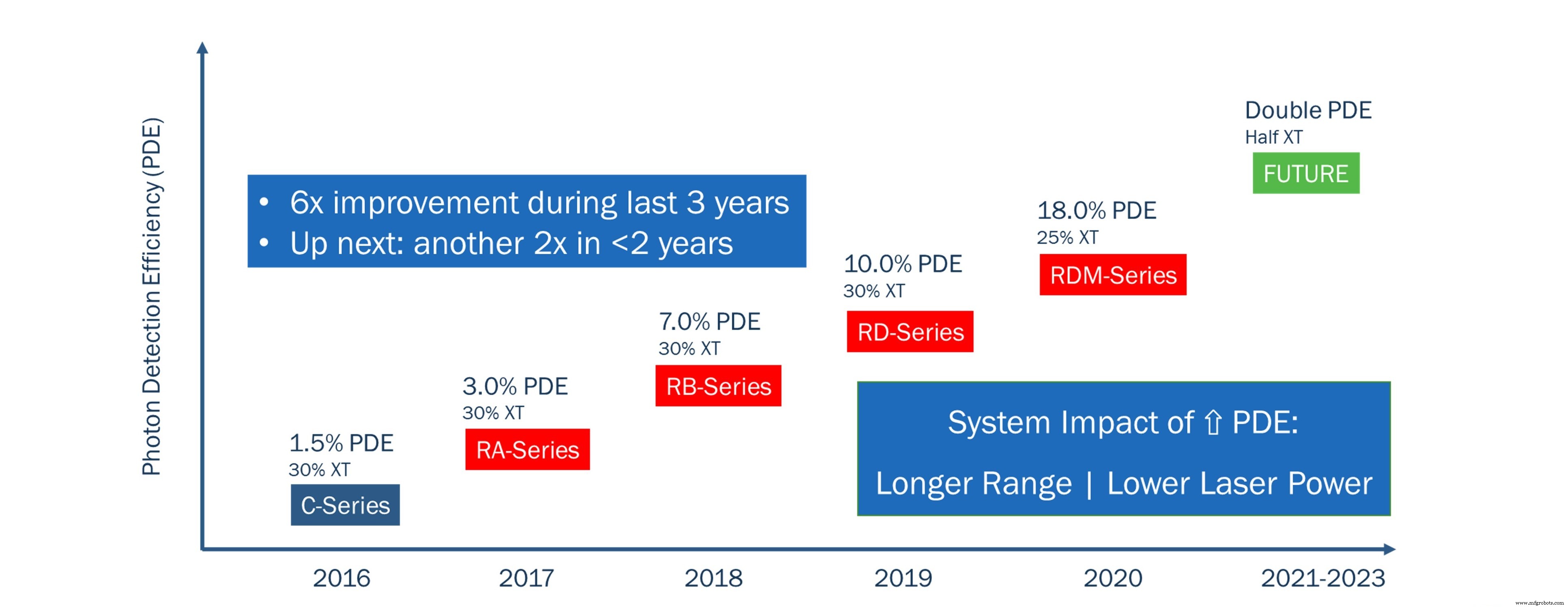
図8:ON SemiconductorSiPMのプロセスロードマップ。
NIR dToFLiDARとSWIRdToF LiDARのパフォーマンスを比較するために、レーザーとセンサーのパラメーターが異なる同一のLiDARアーキテクチャと環境条件に対してシステムモデリングを実行しました。 LiDARアーキテクチャは、図10に示すように、16チャネルの検出器アレイと視野全体に広がるスキャンメカニズムを備えた同軸システムです。このシステムモデルはハードウェアで検証されており、LiDARのパフォーマンスを正確に推定できます。システム。
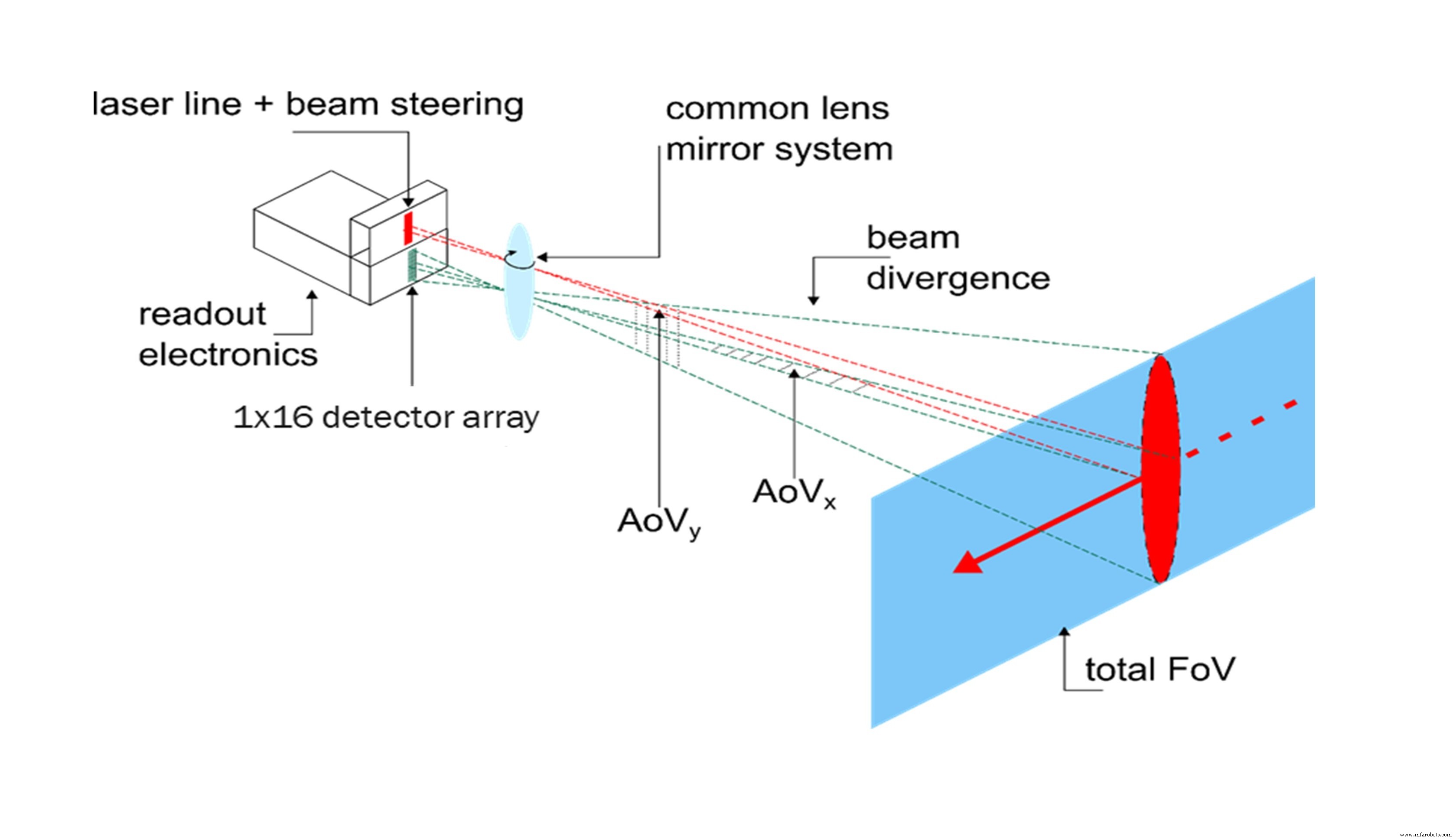
図9:dToFLiDARセンサーのシステムモデル。
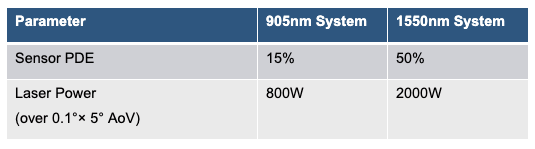
表2:NIRおよびSWIRシステムモデルシミュレーション用のLiDARセンサーとレーザーパラメーター。
1550nmシステムは、高PDE InGaAs合金を使用しているため、より多くのレーザー出力とより高いPDEセンサーを使用します。これにより、システムシミュレーションでより優れた範囲のパフォーマンスが得られるはずです。センサーレンズの50nmバンドパス(それぞれ905nmと1550nmを中心)でフィルター処理された100kluxの周囲光のシステムレベルのパラメーターを使用して、0.1°x 5°の画角を30fpsで水平方向に80°以上スキャンし、500kHzのレーザー繰り返し率パルス幅1ns、レンズ径22mmの結果を図10に示します。
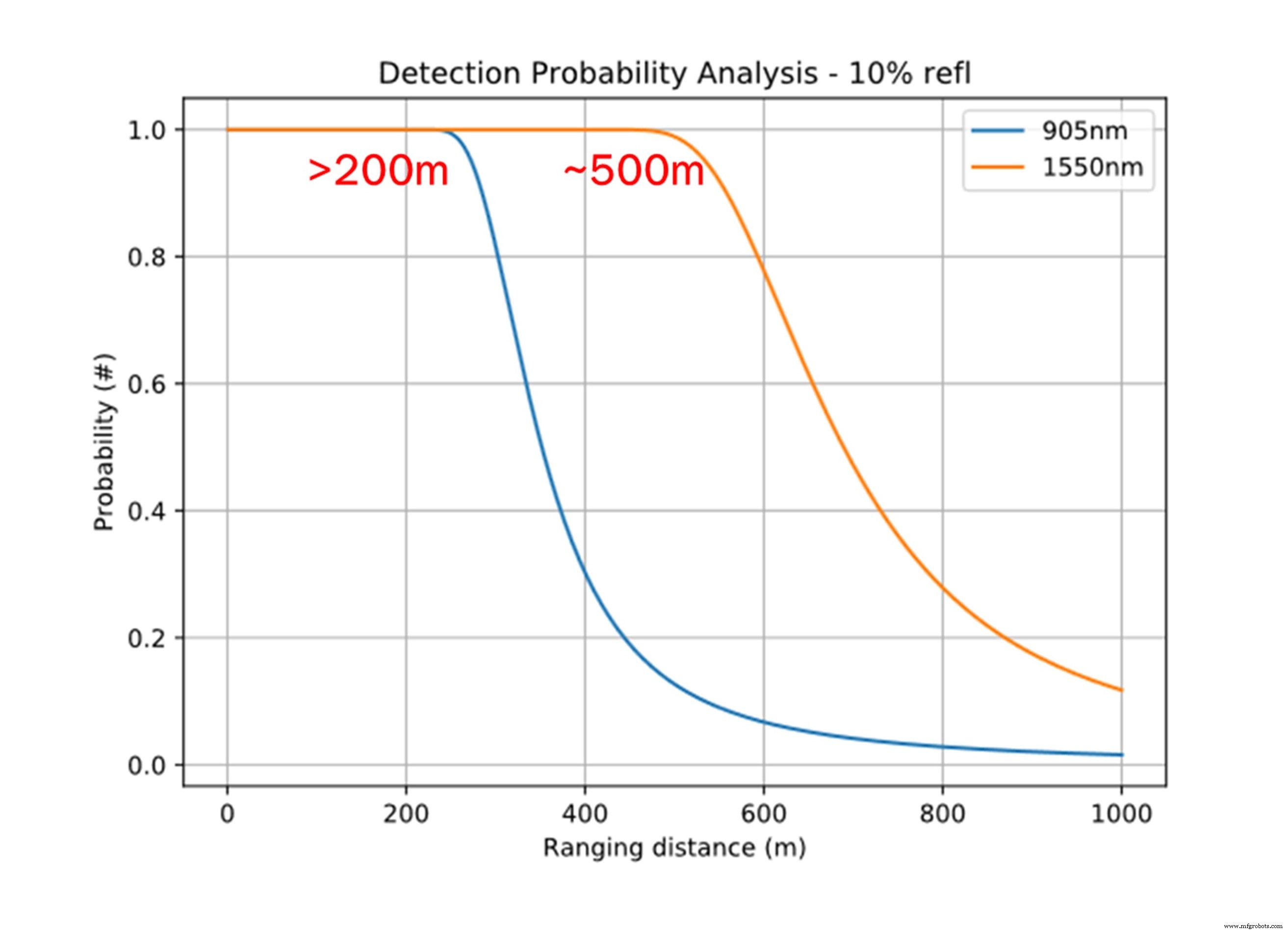
図10:905nmと1550nmに基づく同様のLiDARシステムのシミュレーション結果。
予想通り、1550nmシステムは、99%の測距確率で500mまで到達し、低反射率の物体に対してさらに測距することができます。ただし、905nmベースのシステムは依然として200mをはるかに超える距離を達成しており、両方のタイプのシステムが一般的な環境条件で自動車の長距離LiDAR要件を達成できることを示しています。雨や霧などの劣悪な環境条件が導入されると、SWIR光の吸水特性により、NIRベースのシステムよりもパフォーマンスが急速に低下します。これは、考慮すべきもう1つの要因です。
コストに関する考慮事項
LiDARシステムの背後にあるテクノロジーと、さまざまな波長を使用することの影響について詳しく見てきたので、ここでコストの考慮事項に戻ります。 NIRベースのLiDARに使用されているセンサーは、半導体のコストを可能な限り低く抑えることができるネイティブのCMOSシリコンファウンドリプロセスに由来することを先に説明しました。さらに、今日のファウンドリで容易に利用できるスタックダイテクノロジーを使用して、CMOS読み出しロジックとセンサーを1つのチップに統合できるため、シグナルチェーンがさらに崩壊し、コストが削減されます。逆に、SWIRセンサーはInGaAsのようなIII / V半導体ファウンドリを使用します。これは、より高コストであり、新しいハイブリッドGe-Siテクノロジー(低コストのSWIRセンサーを可能にする可能性があります)により、読み出しロジックとの統合が容易になりますが、それでも5倍以上のコストがかかると推定されます。成熟した後でも、従来のCMOSシリコンよりも。レーザー側では、NIRシステムでレーザーチップを製造するために使用されるGaAsウェーハとSWIRシステムでレーザーチップを製造するために使用されるInGaAsウェーハのウェーハサイズの違いにより、コストの格差が生じ、NIRシステムがはるかに容易に入手可能なサプライヤベースでVCSELを使用する方法も、低コストの統合を可能にします。
上記の要因の合計は、IHS Markit(Amsrud、2019)によって行われた分析につながり、同じタイプのコンポーネント(センサーまたはレーザー)の場合、SWIRシステムのコストは10〜100倍高くなることが示されましたNIRシステムよりも。 NIRシステムのセンサーとレーザーの平均コンポーネントコストは、2019年にはチャネルあたり4ドルから20ドルの間であり、2025年までに2ドルから10ドルに減少すると推定されました。対照的に、SWIRシステムの同等の平均コンポーネントコストは次のように推定されました。 2019年にはチャネルあたり275ドルになり、2025年までにチャネルあたり155ドルに減少します。これは、シングルポイントチャネルの垂直アレイがまだ残っているため、1Dスキャンアプローチを使用している場合でも、LiDARシステムに複数のチャネルが含まれているという事実を考慮すると大きなコスト差です。必須です。
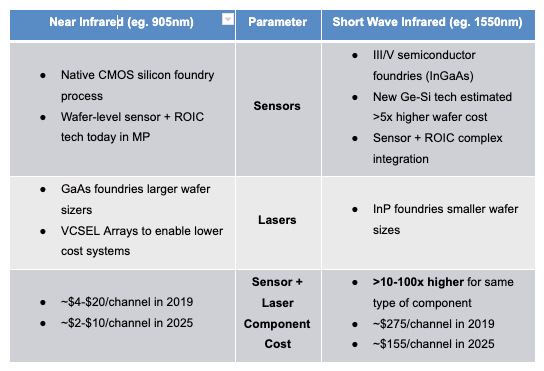
表3:コストに関する考慮事項の要約。 (画像ソース:IHS Markit)
LiDAR市場のダイナミクスも、SWIRキャンプを支持していません。自動運転市場は5年前の市場の期待ほど急速に上昇しておらず、LiDARが必須であるレベル4およびレベル5の自律システムは、広範囲にわたる大量展開から数年先にあります。一方、LiDARを利用する産業およびロボット市場はさらにコスト意識が高く、SWIRシステムの超高性能の利点を必要としないため、これらのメーカーは当面の間、コンポーネントを導入する方法がありません。よく言われるように、ボリュームを増やすことでコストを削減します。ボリュームが増加したときに低コストを取得するという「鶏が先か卵が先か」という問題がありますが、ボリュームを取得するには低コストが必要です。
概要
テクノロジーとNIRシステムとSWIRシステムの違いを深く掘り下げた後、現在存在するLiDARシステムの大部分がNIR波長を使用している理由は明らかです。将来の見通しが100%確実になることは決してありませんが、エコシステムサプライヤのコストと可用性が重要な要素であることは明らかです。また、CMOSシリコンの技術的優位性と規模の経済により、NIRベースのシステムは常に安価になります。 SWIRはより長距離のLiDARシステムを可能にしますが、NIRベースのLiDARは、ADASおよびADでも必要とされる短距離から中距離の構成でも非常に優れたパフォーマンスを発揮しながら、自動車の長距離要件を実現できます。今日の自動車市場向けの大量生産におけるNIRベースのLiDARの存在は、この技術が商業化され、実証されていることを示していますが、統合が行われ、勝者と敗者が揺るがされるまでにはまだ時間がかかります。結局のところ、20世紀の変わり目の自動車産業には30の異なるメーカーが含まれ、それは次の10年間で500近くに増加しましたが、その後、ほとんどのメーカーが消滅するまでに数年しかかかりませんでした。この10年の終わりまでに、LiDARメーカーでも同様の動きが起こると予想されます。
参考資料
YoleDéveloppement(2020)。 自動車および産業用アプリケーション向けLiDAR–市場および技術レポート2020
Amsrud、P。(2019年9月25日)。 低コストのLIDARシステムへの競争[会議のプレゼンテーション] 。 Automotive LIDAR 2019、米国ミシガン州デトロイト。 IHSMarkit。
—オン・セミコンダクター、自動車センシング部門、事業開発ディレクター、Bahman Hadji
>>この記事は、もともと姉妹サイトEEで公開されました。タイムズ。
>
関連コンテンツ:
- ADASの専門家は将来の車両へのセンサーの統合について熟考しています
- スマートシティ:高度道路交通システムにおけるLIDARの事例
- 自動車用電子システムの変化を推進しているもの
- 飛行時間型テクノロジーは精度の向上を約束します
- 完全自動運転車を実現するためにFIRセンシングテクノロジーが不可欠な理由
Embeddedの詳細については、Embeddedの週刊メールニュースレターを購読してください。
センサー