


データハーベストフィードAgriculture4.0
農家はセンサーデータを収集して、予防的農業から予測的農業に移行しています。
産業革命は、創業以来、生産プロセスの自動化に重点を置いてきました。インダストリー4.0の時代に入った今、ほとんどの産業プロセスはデータ中心になり、一般にデータ操作の5つのステップ(収集、送信、保存、分析、そして最後に表示)が含まれています。この最後のステップは、人間をループに保つことですが、データを何らかの作動装置にフィードバックして、プロセスをロボット工学の領域に持ち込むこともできます。

農業は過去2世紀にわたって工業化の影響を受けていませんでしたが、近年、農業4.0は勢いを増しています。工業生産がデータ管理に移行したように、農業は現在その道を進んでいます。従来、産業分野にサービスを提供してきた企業は、現在、農業セクターに対して同様のデータ中心のアプローチを提供しており、農業機械メーカーが産業機器製造に拡大するのを見ています。農業は、従来の工業製造業に関して構造化されていない環境を特徴とすることがよくありますが、新しいデータ中心のテクノロジーの多様性は、農業が自動車や航空宇宙と同じ方法で試験運用される産業になるのに役立っています。農夫は他のエンジニアと同じようにエンジニアになりました。
それはすべて1990年代に始まり、高価値の乳製品業界向けの最初の自動化装置でした。主に、スウェーデンのメーカーであるデラバルやオランダを拠点とするレリーなどの搾乳機です。同時に、穀物、特に米用の光学選別機は、日本に本社を置く佐竹やスイスに拠点を置くビューラーなどの企業によって開発されました。これらの選別技術のいくつかは、ブドウ園のブドウなどの高級農産物のために再び現場に行き着きました。南フランスのPellencは、このようなロボットギアを開発し、農家をデータサイエンティストに変えました。
実際、この新世代の農家に自動化が導入されると、彼らは収穫量を受動的に見るだけでなく、農産物の質と量を改善するために積極的に行動するという追加のステップに進む機会がありました。過去の小規模な農作業は、農民の目と直感に頼って日常の活動を監視することができましたが、今日の巨大な農作業は、もはや人間の感覚に頼ることができません。データテクノロジーは、ファームを正しい方向に導くための中心的な役割を果たしています。牧畜、作物生産、ワインなどの高級生産のいずれの場合でも、データはAgriculture4.0の焦点です。
農業におけるカメラの利用
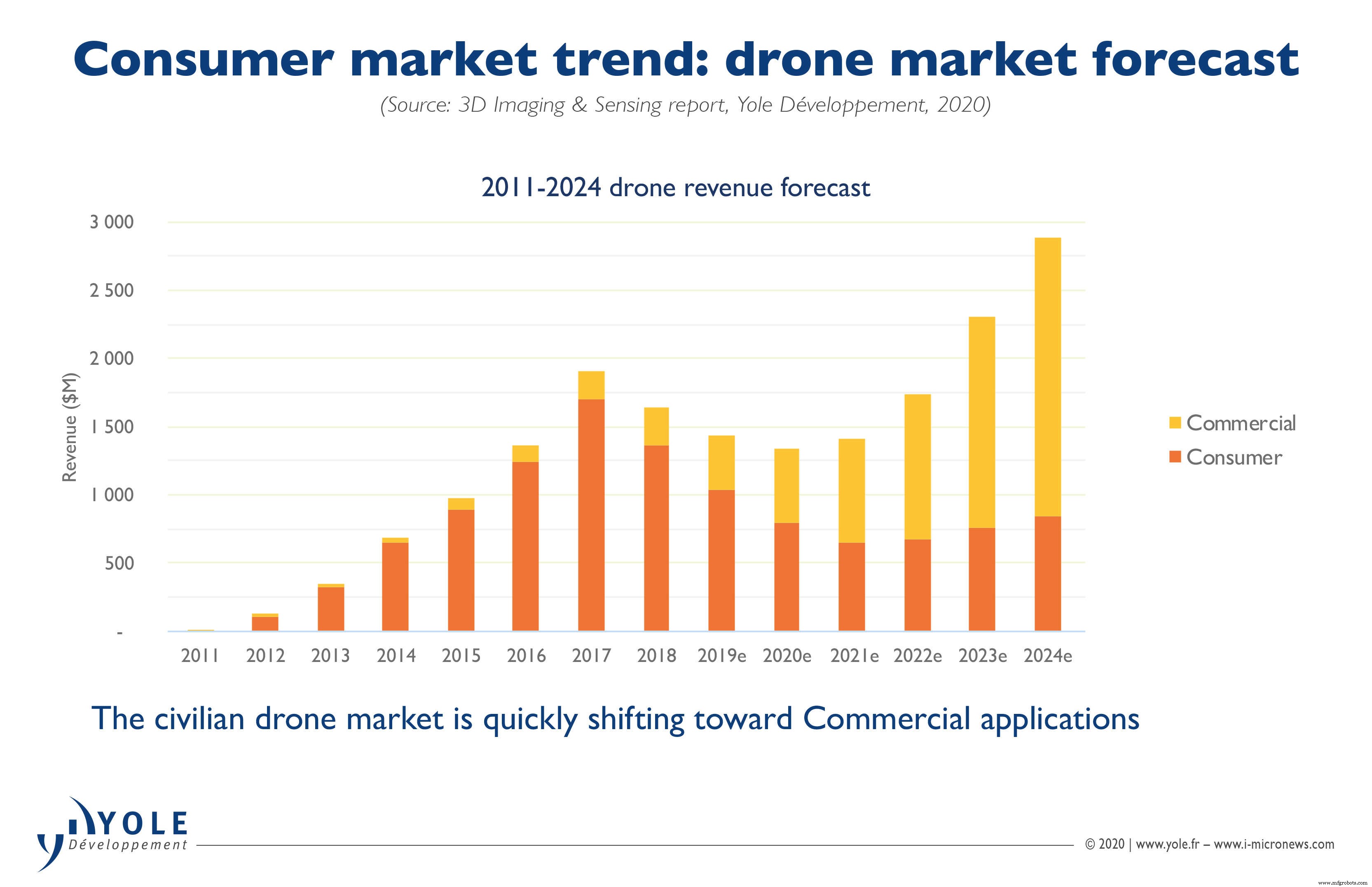
農業データ管理の最良の例の1つは、ドローンを使用した圃場の監視です。パリを拠点とするParrotは、主に米国の子会社であるMicaSenseのおかげで、この分野の主要なプレーヤーです。しかし、フランスの会社は1月に、MicaSenseを米国を拠点とするデータ収集、分析、航空画像サービス、およびドローン会社であるAgEagleAerialに2,300万米ドルで売却することに合意したと発表しました。 MicaSenseは、さまざまな波長を使用して正規化植生指数(NDVI)マップを計算するカメラを開発しました。これは、作物の成長を監視し、問題のある領域を特定するための一般的な方法になりました。現在、最先端の方法論では、NDVIマップをトラクターにダウンロードし、それによって現場に供給される肥料を調整しています。
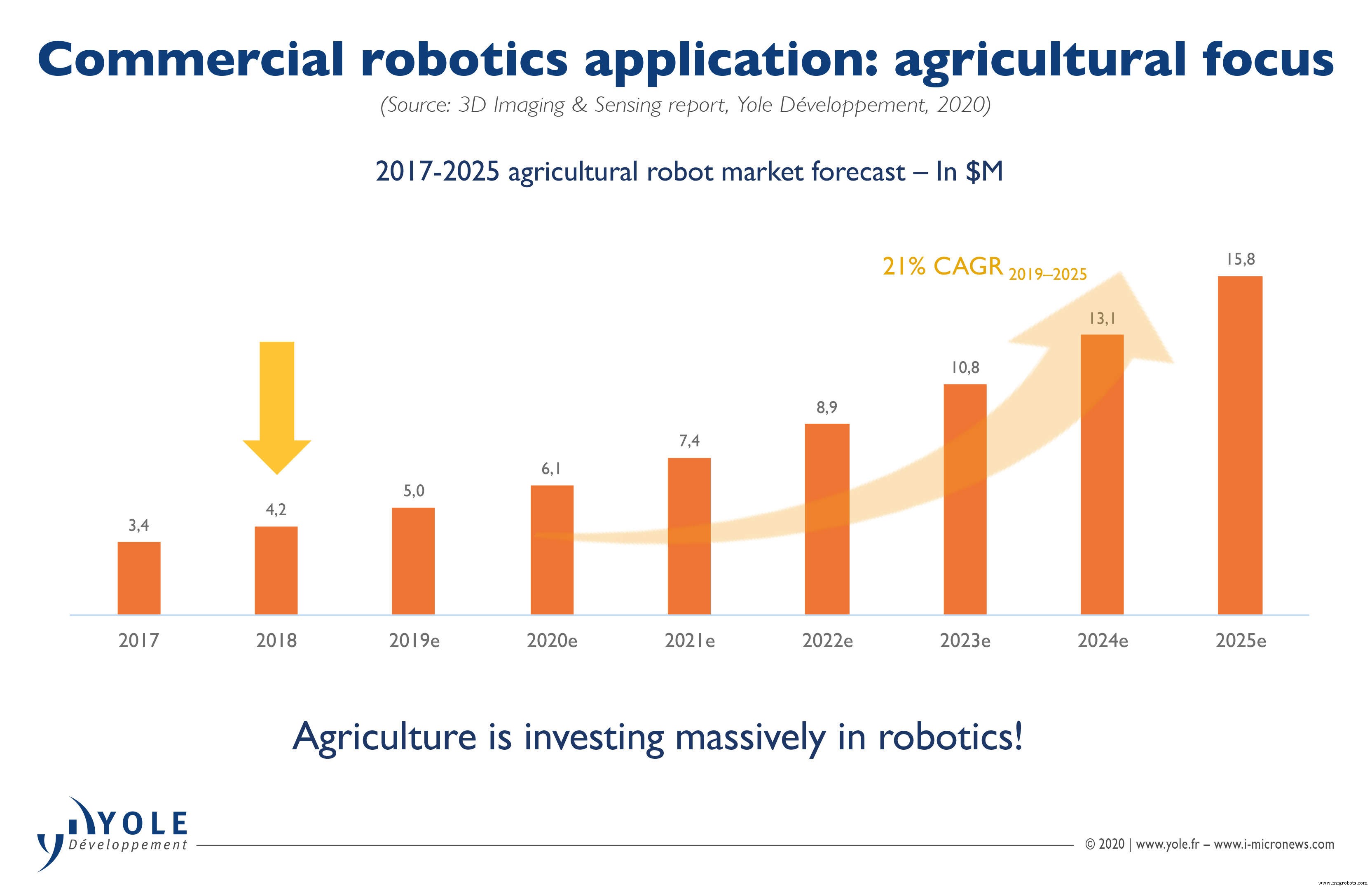
米国連邦航空局(FAA)は最近、米国で登録されている160万機のドローンの7%が農業用であると報告しました。これは、米国の農業用の10万台以上のアクティブなドローンに相当します。商業用ドローン市場全体のごく一部しか占めていませんが、農業用ドローンセグメントは収益を生み出す重要な現実となっています。データの収集はますますロボットの役割になっています。自動納屋、農業用無人機、自律型トラクターのいずれであっても、データはもはや新しい石油ではありません。それは新しい作物です。
農業におけるIMUの利用
スマート農業で使用されるロボットは、空中(ドローン)と陸上(トラクターや収穫機など)の2つの主要なカテゴリに分類されます。どちらの場合も、ロボットの機能はさまざまなタイプのセンサーに依存しています。そのような機能の1つは、ナビゲーションと安定化のための慣性システムです。これは、高性能、信頼性、および精度の要件を満たす必要があります。低バイアスドリフト;低バイアス不安定性;投資を正当化するために、すべて手頃な価格で、温度に対して安定したパフォーマンスを発揮します。
クリックしてフルサイズの画像を表示
(出典:YoleDéveloppement)
クリックしてフルサイズの画像を表示
(出典:YoleDéveloppement)
ドローンは、(カメラを介して)作物畑の健康と状態を監視することを可能にし、通常、より高価な飛行機ベースの施肥ソリューションの代わりに、中小規模の畑(<20ヘクタール)の施肥に使用されます。ドローンのナビゲーションと安定化は、カメラが何をキャプチャしているかを知る必要があるため、カメラを地面に向けるときに非常に重要です。高さ10メートルで、5°の誤差は80cmの誤差になります。
GPSはドローンのナビゲーションには十分正確である可能性がありますが、カメラの安定化には堅牢な慣性測定装置(IMU)ソリューションが必要です。
農業用の陸上ロボット車両は作物の列をナビゲートし、植物の損傷を避けるためにセンチメートルレベルの精度が必要です。これらの機械のほとんどは正確なGPSシステムを備えており、ドライバーは車両の位置を知ることができ、二重受精や受精不足を防ぎます。ただし、GPSは、信号が失われる可能性のある樹木の下など、ロボットが運転する場合に制限される可能性があります。そこで、IMUまたは姿勢方位基準システム(AHRS)ソリューションが必要になります。微小電気機械システム(MEMS)に基づくIMUは、高性能、低サイズ、重量、電力、およびコスト(SWAP-C)の陸上アプリケーション要件を満たすために十分に装備されています。
モノのインターネットテクノロジー