


LVDT復調:整流器タイプと同期復調
2つの復調方法を比較する方法を学びます。同期復調と整流器タイプの復調です。ここでは、各方法の長所、短所、および適切なアプリケーションについて説明します。
前回の記事では、ダイオード整流器復調器の動作と課題について説明しました。この記事では、最初に整流器タイプの復調器の一般的な制限について説明します。次に、同期復調器がこれらの問題のいくつかに対処できることがわかります。最後に、LVDTアプリケーションでの同期復調の欠点について説明します。
整流器タイプ復調器の制限
精密整流器は単純なダイオード整流器の課題を解決できますが、整流器タイプの復調器には一般にいくつかの欠点があります。整流器タイプの復調器では、各二次巻線の両端の電圧を整流するために、LVDT二次側のセンタータップにアクセスする必要があります。したがって、このタイプの復調は5線式LVDTにのみ適用できます(図1(b))。
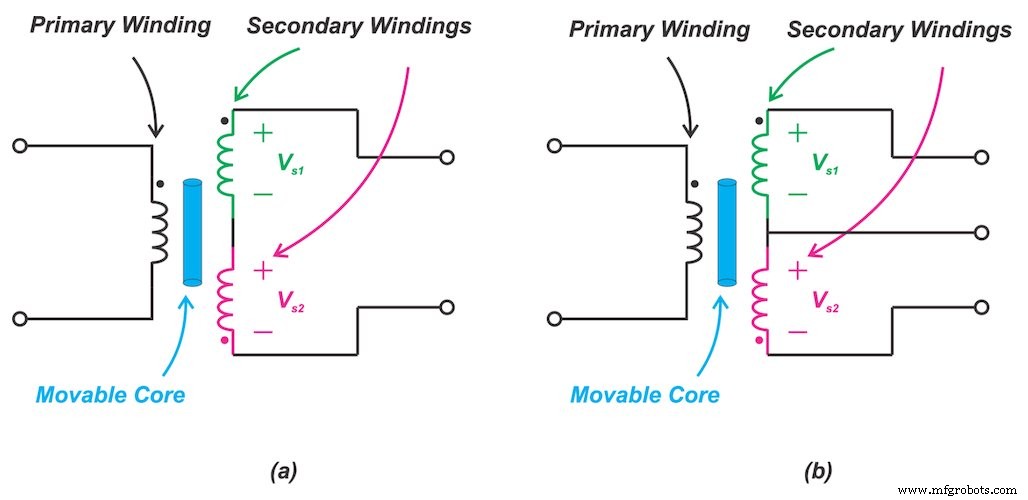
図1.(a) 4線式および(b) 5線式LVDT。
センタータップにアクセスする必要がなく、2つのセカンダリ間の電圧差を処理することでコア位置を決定できる復調方法は他にもあります。これらの復調器により、図1(a)に示すように4線式LVDTを使用できます。
電気接続の数を最小限にすることは本当に重要ですか?
コンディショニング回路がセンサーから遠い距離にある多くのアプリケーションがあります。良い例は、LVDTから数百メートル離れた安全な場所にコンディショニング回路を配置する必要がある放射性アプリケーションの過酷な環境で測定を行うことです。このような場合、5線式構成で2つの二次電圧を長距離で伝送するのは難しい場合があります。コンディショニングモジュールをLVDTから離して配置する場合は、分散容量が低く、バランスの取れた配線が必要です。これは、配線コストの大幅な増加を意味します。
整流器タイプの復調器のもう1つの欠点は、ノイズ除去が制限されることです。 250Hzの正弦波形に従うコア変位を持つLVDTセンサーについて考えてみます。図2の赤い曲線は、一般的なダイオード整流器を使用して得られたこのLVDTの復調出力を示しています。
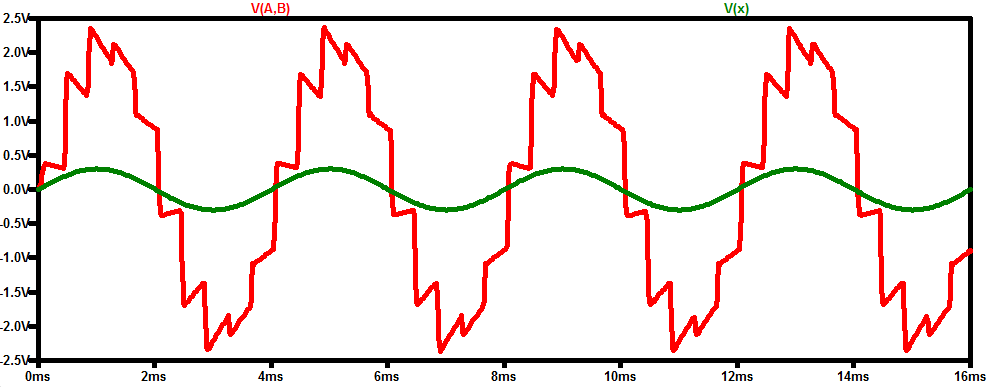
図2。
この図の緑色の曲線は、コアの変位xを示しています。ご覧のとおり、出力信号は、一部の高周波成分に対応する急激な変化があることを除けば、xの増幅バージョンのように見えます。
これらの不要な高周波成分を取り除くために、システムの機械的帯域幅(250 Hz)よりもわずかに高いカットオフ周波数のローパスフィルターを使用できます。したがって、理想的なローパスフィルターを使用しても、250Hzまでのすべての周波数成分は減衰せずにフィルターを通過します。したがって、センサー出力に結合する250 Hz未満のノイズ成分は、復調器出力にも現れます。
ノイズ性能の低下は、整流器タイプの復調器の主な欠点です。この制限は、長いケーブルではさらに顕著になります。ノイズ性能と5線構成の要件により、この回路は遠隔地への長いケーブル配線には適していません。以下で説明する同期復調は、これら2つの問題に対処できます。
同期復調
図3に示すLVDTについて考えてみます。\ [V_ {EXC} =A_p \ cos(2 \ pi \ times f_p \ times t)\]があると仮定します。
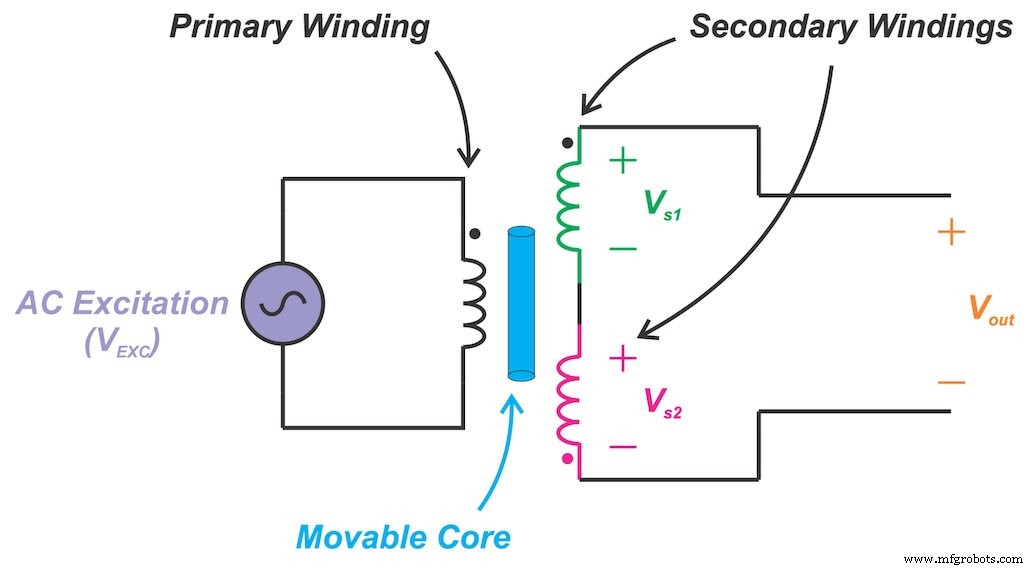
図3。 LVDTの例
差動出力(\ [V_ {out} \])は振幅変調信号であり、次のように表すことができます。
\ [V_ {out} =A_s \ times x \ times \ cos(2 \ pi \ times f_p \ times t + \ phi)\]
式1。
ここで、xはコア変位であり、\ [A_s \]は特定のxの全体的な出力振幅を与える倍率です。位相項\ [\ phi \]は、一次電圧と二次電圧の間のLVDTによって引き起こされる位相差です。この位相シフトは、理想的には非常に小さく、特にメーカーが指定した特定の周波数付近である必要があります。ただし、通常、この位相シフトを考慮する必要があります。
同期復調技術は、LVDT差動出力に励起信号(または一般に励起信号と同期する信号)を乗算します。これにより:
\ [V_ {demod} =V_ {out} \ times V_ {EXC} =A_s \ times x \ times \ cos(2 \ pi \ times f_p \ times t + \ phi)\ times A_p \ cos(2 \ pi \ times f_p \ times t)\]
式2。
これは次のように単純化されます:
\ [V_ {demod} =\ frac {1} {2} \ times A_s \ times x \ times A_p [\ cos(\ phi)+ \ cos(2 \ pi \ times 2f_p \ times t + \ phi)] \]
括弧内の最初の項はDCですが、2番目の項は励起周波数の2倍です。したがって、狭いローパスフィルターは第2項を削除でき、次のようになります。
\ [V_ {filtered} =\ frac {1} {2} \ times A_s \ times x \ times A_p \ cos(\ phi)\]
式3。
これにより、コア変位xに比例したDC電圧が得られます。
方形波の乗算による同期復調
アナログ乗算器を使用して、LVDT出力に励起正弦波を乗算できます(式2)。ただし、アナログ乗算器は高価であり、線形性の制限があります。正弦波を乗算する代わりに、励起入力に同期した方形波を信号に乗算できます。
正弦波の代わりに方形波をどのように使用できるのか疑問に思われるかもしれません。 ±1の間で切り替わる方形波は、方形波周波数の奇数次高調波での正弦波の無限和として表すことができます。したがって、周波数\ [f_p \]の方形波は次のように表すことができます。
\ [v_ {squarewave}(t)=\ sum_ {n =1、3、5} ^ {\ infty} \ frac {4} {n \ pi} \ sin (2 \ pi \ times nf_p \ times t)\]
LVDT出力(\ [f_p \]の正弦波)に方形波を掛けると、方形波の基本成分\ [(\ frac {4} {\ pi} \ sin(2 \ pi \ times f_p \ times t))\]は、\ [2f_p \]にDC成分と高周波成分を生成します。前のセクションで説明したように、高周波成分はローパスフィルターによって抑制され、目的のDC成分が出力に表示されます。
方形波の高次高調波を乗算すると、\ [f_p \]の倍数でも高周波成分が生成されます。したがって、DC成分は、信号に正弦波を乗算する場合と同じように、フィルター出力に現れる唯一の成分です。方形波を乗算する主な利点は、復調器の回路実装を大幅に簡素化できることです。
同期復調器の回路実装
方形波ベースの同期復調器を図4に示します。
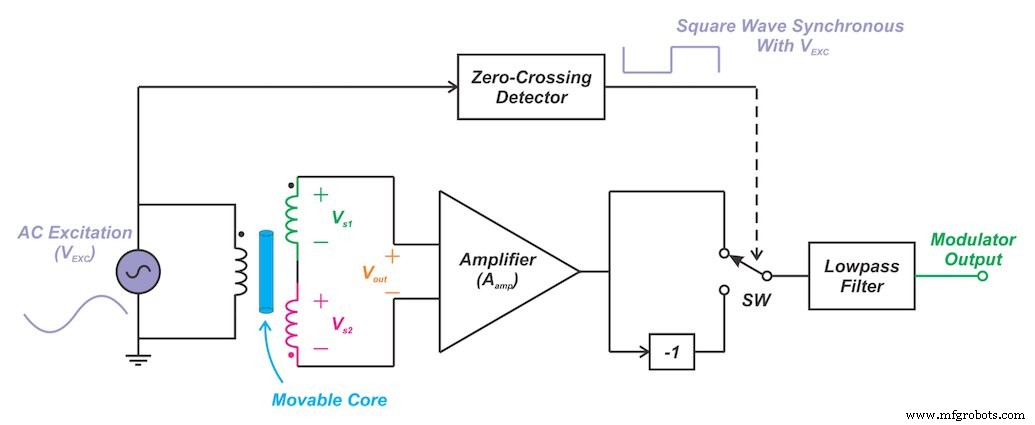
図4。 方形波ベースの同期復調器
この場合、LVDT出力の増幅されたバージョンは、励起正弦波ではなく方形波で乗算されます。方形波は励起入力と同期しており、上のブロック図に示すように「ゼロクロッシング検出器」を介して取得されます。
方形波による乗算を実行するために、信号チェーンのゲインは\ [±A_ {amp} \]の間で周期的に変更されます(\ [A_ {amp} \]は増幅器のゲインです)。下のパスには-1のゲインが組み込まれていることに注意してください。これは、方形波を使用してスイッチSWを駆動し、信号パスを上下のパス間で変更することで実現されます。これは、アンプの出力に方形波を掛けることと実質的に同じです。
最後に、ローパスフィルタを使用して、出力のDC項を維持し、高周波成分を抑制します。
LVDT同期復調器の長所
同期復調の主な利点は、そのノイズ性能です。上で説明したように、同期復調周波数はLVDT出力をDCにシフトし、ローパスフィルターを使用してこのDC成分を保持します。ローパスフィルターは、通過帯域外のすべてのノイズ成分を抑制します。
目的の信号はDCであるため、狭いローパスフィルターを使用できます。これにより、システム帯域幅が制限され、復調器がLVDT出力に結合するノイズの大部分を大幅に抑制できるようになります。さらに、同期復調では、4線式LVDTを使用できます。
LVDT同期復調器の短所
同期復調は、整流器タイプの復調器と比較して高いノイズ耐性を提供できますが、その出力は励起電圧の振幅に依存します(式3の\ [A_p \])。したがって、同期復調では、励起入力の振幅安定性が重要になります。
もう1つの問題は、復調器の出力がLVDT伝達関数の位相シフトに依存することです(式3の\ [\ cos(\ phi)\])。この位相シフトは、理想的には非常に小さい必要があります。ただし、これは一定ではなく、動作点によって変化する可能性があります。実用的な復調回路は、一般に、生成された方形波の位相を調整するために位相補償ネットワークを採用しています。補償ネットワークは、復調器の複雑さを増す可能性があります。
ただし、この複雑さが増すと、整流器タイプの復調器と比較した場合、回路は比較的長いケーブルに適したものになります。これは、位相シフト項\ [\ phi \]を使用して、配線による遅延を考慮に入れることができるためです。したがって、位相補償回路を使用して、ケーブルの遅延を補償し、回路をより長いワイヤに適したものにすることもできます。
その他の復調技術
同期復調は、より高いノイズ耐性を提供し、4つの電気接続のみを必要とします。ただし、励起入力の振幅への依存や位相シフトの問題など、独自の制限があります。これらの問題に対処するために、他のいくつかの復調技術があります。これらの手法は通常、レシオメトリック測定の概念とDSPベースの方法を使用して、同期復調器の制限を回避します。
他のセンサータイプに適用した場合の同期復調の詳細については、次の記事を参照してください。
- 同期復調の概要
- アナログ乗算器とスイッチベースの乗算器を使用した同期復調
- 同期復調器のアナログおよびデジタル実装
私の記事の完全なリストを表示するには、このページにアクセスしてください。
モノのインターネットテクノロジー
- オープンDDSとRTIDDSソフトウェア
- 明日の自動運転車の内部:概念実証から現実へ
- DDSセキュリティハード(ウェア)ウェイ-SGXパート3:強化されたDDSサービス
- DDSセキュリティハード(ウェア)ウェイ-SGX:パート2(マイクロ+セキュリティ+スコーン)
- DDSセキュリティハード(ウェア)ウェイ-SGX:パート1(概要)
- MQTTとDDS:IoTでのマシンツーマシン通信
- IIoTとは何ですか?産業用モノのインターネット入門書
- RTIでのソフトウェアテスト
- Connext DDS用のTelegrafプラグイン:DDSとInfluxDBを使用して時系列監視システムを構築する
- Connext 6:利用可能になりました!
- CNC旋盤は同期スピンドル技術を特徴とします