


デジタル(ON / OFF)ホール効果デバイス:スイッチとラッチ
この技術記事では、Bフィールド、ユニポーラスイッチ、オムニポーラスイッチ、ホール効果ラッチ、およびバイポーラスイッチの極性について説明します。
>ホール効果スイッチとラッチは磁場コンパレータです。磁束密度(Bフィールドと呼ばれることもあります)を事前に指定されたしきい値と比較し、比較結果を1ビットのデジタル値として出力します。デジタル(オン/オフ)ホールセンサーには、ユニポーラスイッチ、バイポーラスイッチ、オムニポーラスイッチ、ラッチの4つのカテゴリがあります。
各タイプの伝達関数について詳しく見ていきます。しかしその前に、私たちの議論で一般的に使用される重要な概念、つまり磁束密度の極性を明らかにしたいと思います。
Bフィールドの極性をどのように定義しますか?
ホール効果デバイスは指向性があります。感度軸に沿った磁束密度の成分のみを感知します。図1は、2つの一般的なホールデバイスパッケージの感度軸を示しています。
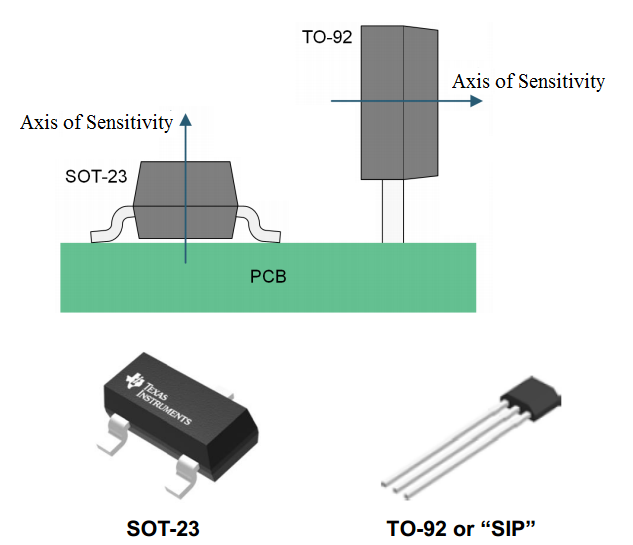
図1。 画像提供:TexasInstruments。
デバイスに印加された磁場が感度軸の方向に成分を生成する場合、B磁場は正であると見なされます。フィールドが感度軸の反対方向に成分を生成する場合、それは負であると見なされます。図2は、センサー位置(A)で磁束密度が負極性である例を示しています。
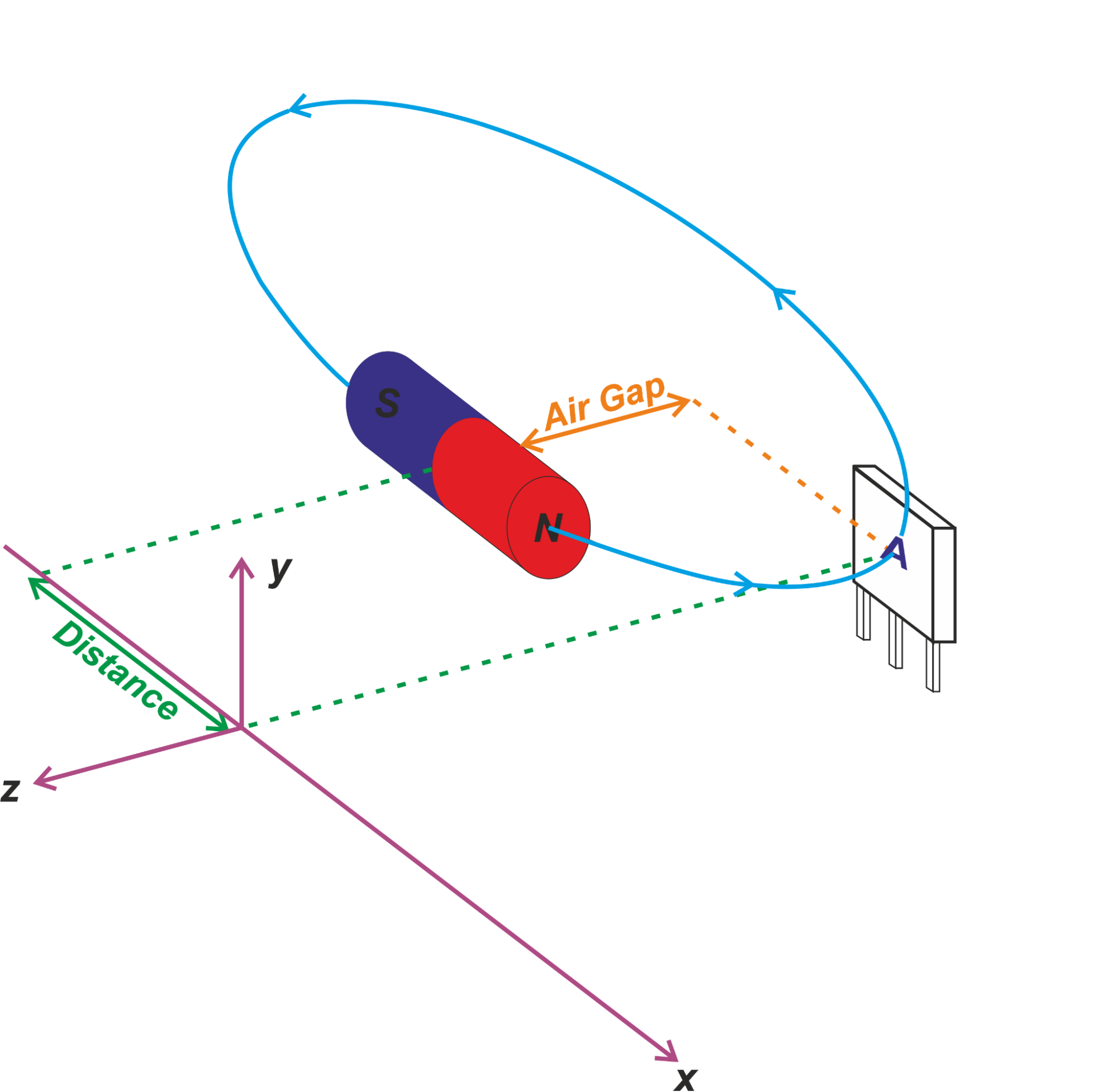
図2
上記の例では、デバイスの感度軸がz軸方向にあると仮定しています。磁石の磁力線はN極からS極に向かうため、デバイスが感知するB磁場は負になります。
ホールセンサーメーカーが一般的に使用しているBフィールドの極性に関する規則もあります。彼らは、磁石の南極によって生成される磁場を正と見なし、北極の磁場を負と見なします。これは、センサーのブランド面が磁石の方を向いているという仮定に基づいています。ブランド面は、デバイスの部品番号などを確認できるセンサーの前面です。図1に示す感度軸を考慮すると、センサーのブランド面に磁石の南極を提示すると、感度軸方向の磁場(正の磁場)。同様に、北極は負の磁場を生成します。センサーパッケージの裏側(パッケージのブランド面ではない)に磁極を提示すると、上記の規則は無効になります。
この議論を終えるための最後の注意:多くのホールデバイスは1次元であり、感度の1つの軸(図1に示されているものなど)のみに沿ってBフィールドを感知します。ただし、3つの感度軸をサポートするために複数のホール素子を使用するより高度なセンサーICがあります(3次元センサー)。それでは、さまざまなタイプのデジタル(オン/オフ)ホールデバイスの伝達関数を調べてみましょう。
ユニポーラスイッチ
ユニポーラスイッチの機能を図3に示します。
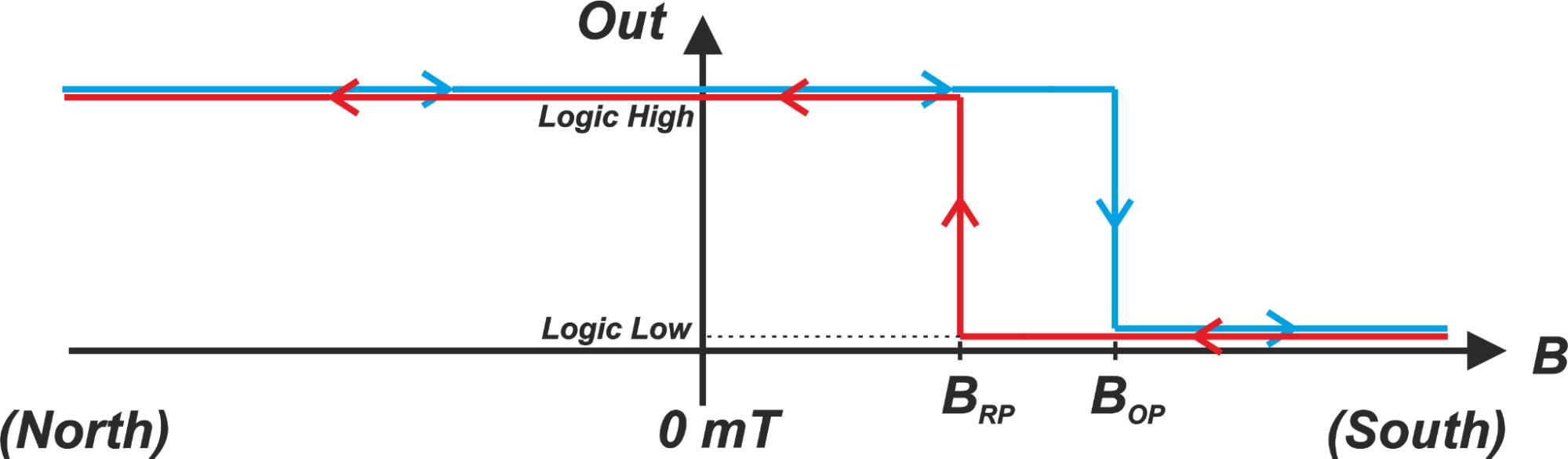
図3
このデバイスは、スイッチングしきい値(B RP )があるため、ユニポーラスイッチと呼ばれます。 およびB OP )はB磁場軸の正の領域にあります。出力状態は、南極性フィールドに応答してのみ変更できます。北極性または負のフィールドはセンサーに影響を与えません。 「ユニポーラスイッチ」の名前を説明します。
デバイスが磁場の変化にどのように反応するかを見てみましょう。北極性フィールドがセンサーに適用され、適用されるフィールドが徐々に増加すると仮定します(より正になります)。 B OP の場合 、デバイスはオフで、出力はロジックハイです。印加された磁場がしきい値B OP よりも大きくなる(または正になる)につれて 、デバイスがオンになり、出力が反対の状態(ロジックロー)に切り替わります。増加するB磁場の伝達関数は、図の青い曲線で示されています。
アクティブ化されたデバイスは、減少するフィールドにどのように応答しますか?磁場が減少する場合、印加される磁場がB RP 未満になるまで、デバイスはオンのままになります(ロジックロー)。 。これは、上の図の赤い曲線で示されています。 B RP の場合 、デバイスの電源がオフになり、出力がロジックハイになります。
したがって、増加する磁場のスイッチングしきい値は、減少する磁場のスイッチングしきい値とは異なります。このヒステリシスは、出力でクリーンなスイッチングができるように意図的に設計されています。ホール効果検知システムの機械的振動、および電気的および電磁的ノイズは、検知された磁場にノイズを導入する可能性があります。しきい値レベル付近のBフィールドノイズは、ホールセンサーの出力で不確定で急速に変化する変動につながる可能性があります(図4)。これらの不要な変動は、増加するフィールドと減少するフィールドのしきい値をわずかに異なるものにすることで除去されます。
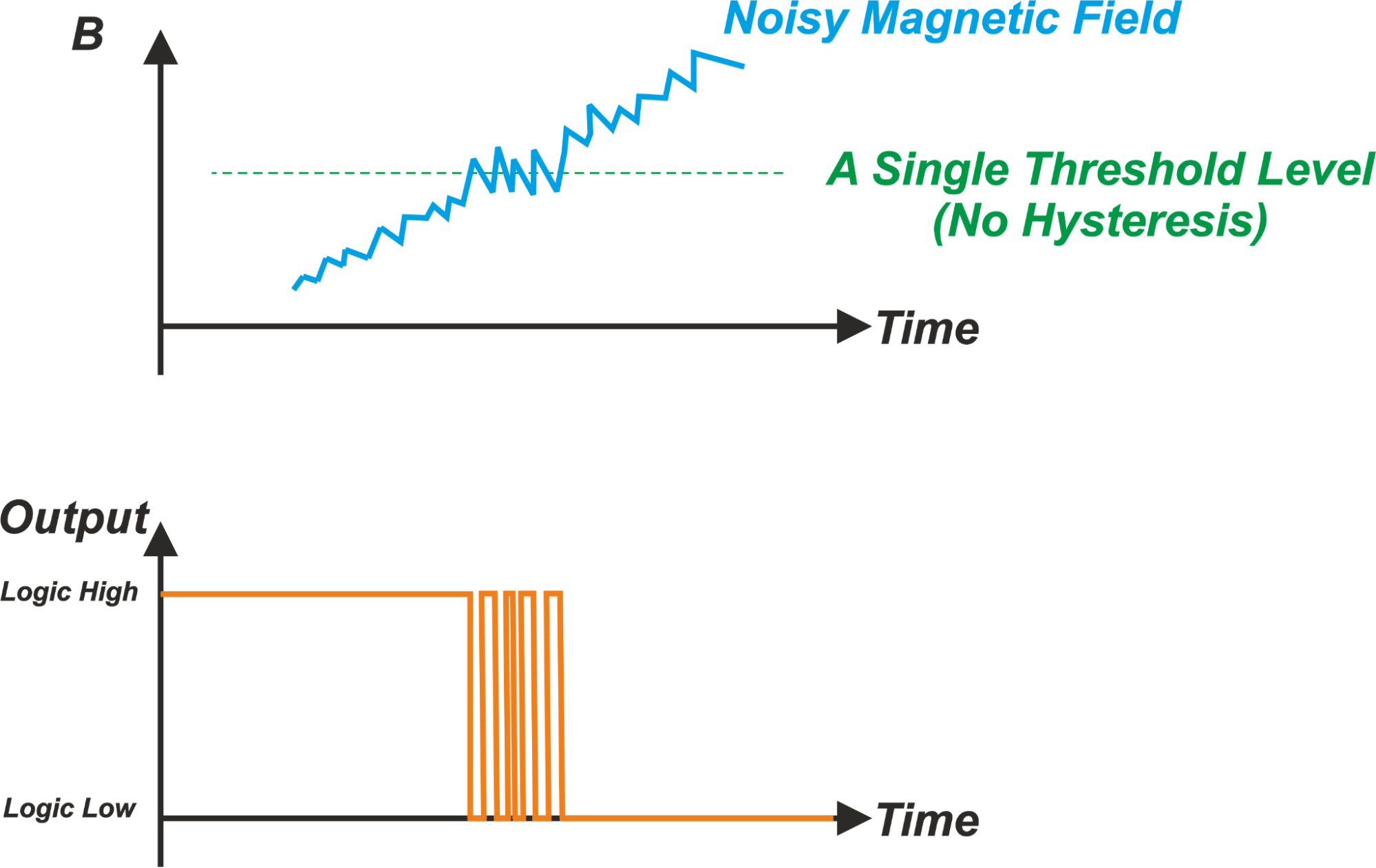
図4。 ヒステリシスがないと、出力はしきい値付近で不確定になる可能性があります。
上で見たように、ユニポーラスイッチの動作は2つの異なるパラメータで表すことができます:B OP およびB RP 。 B OP 「磁気操作点」または単に「操作点」の略です。これは、増加する磁場のしきい値レベルを示し、それを超えるとセンサーがオンになります。 B RP は「磁気リリースポイント」または単に「リリースポイント」です。減少する磁場のしきい値レベルを示します。 B RP の場合 、デバイスはオフです。ヒステリシスはB HYS で表されます これは次のように与えられます:
B HYS =B OP − B RP
同様の表記法を使用して、他のタイプのデジタルホールデバイスの動作を説明できることを以下で説明します。
センサーの電子設計によっては、センサー出力のオンとオフの状態が図3に示されている状態と逆になる場合があることに注意してください(デバイスがオフの場合はロジックロー、オンの場合はロジックハイ)。
オムニポーラスイッチ
オムニポーラスイッチの伝達関数を図5に示します。
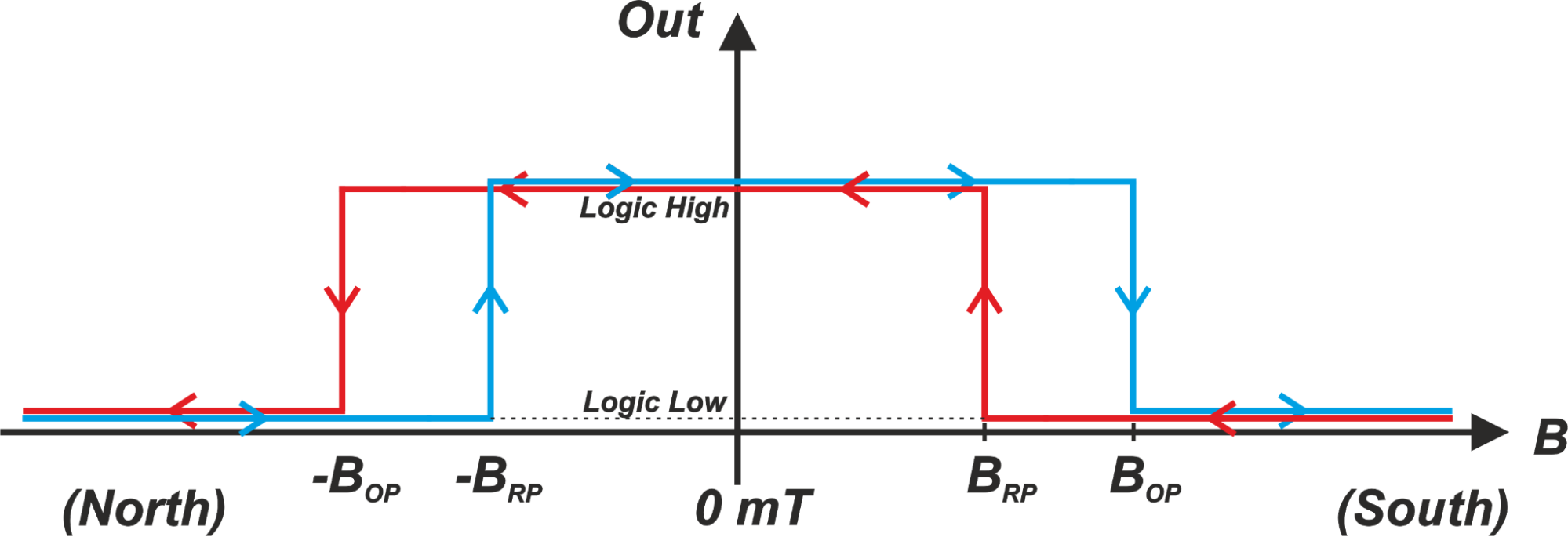
図5
オムニポーラスイッチは、強い正のフィールドまたは強い負のフィールドのいずれかでオンになります。図のように、磁場の大きさがB OP より大きくなると (| B |> B OP )、デバイスのスイッチがオンになり、出力がロジックローになります。 Bフィールドの大きさがB RP より小さくなったとき (| B | RP )、センサーがオフになり、出力がロジックハイになります。青い曲線は、Bフィールドが大きな負の値から大きな正の値に変化したときのセンサー出力を示しています。赤い曲線は、減少するBフィールドの出力を示しています。オムニポーラスイッチを使用すると、動作点の大きさは正と負の両方のBフィールドで同じになります。同様に、リリースポイントの大きさは、南と北の極性フィールドの両方で同じです。
ホール効果ラッチ
ホール効果ラッチの伝達関数を図6に示します。
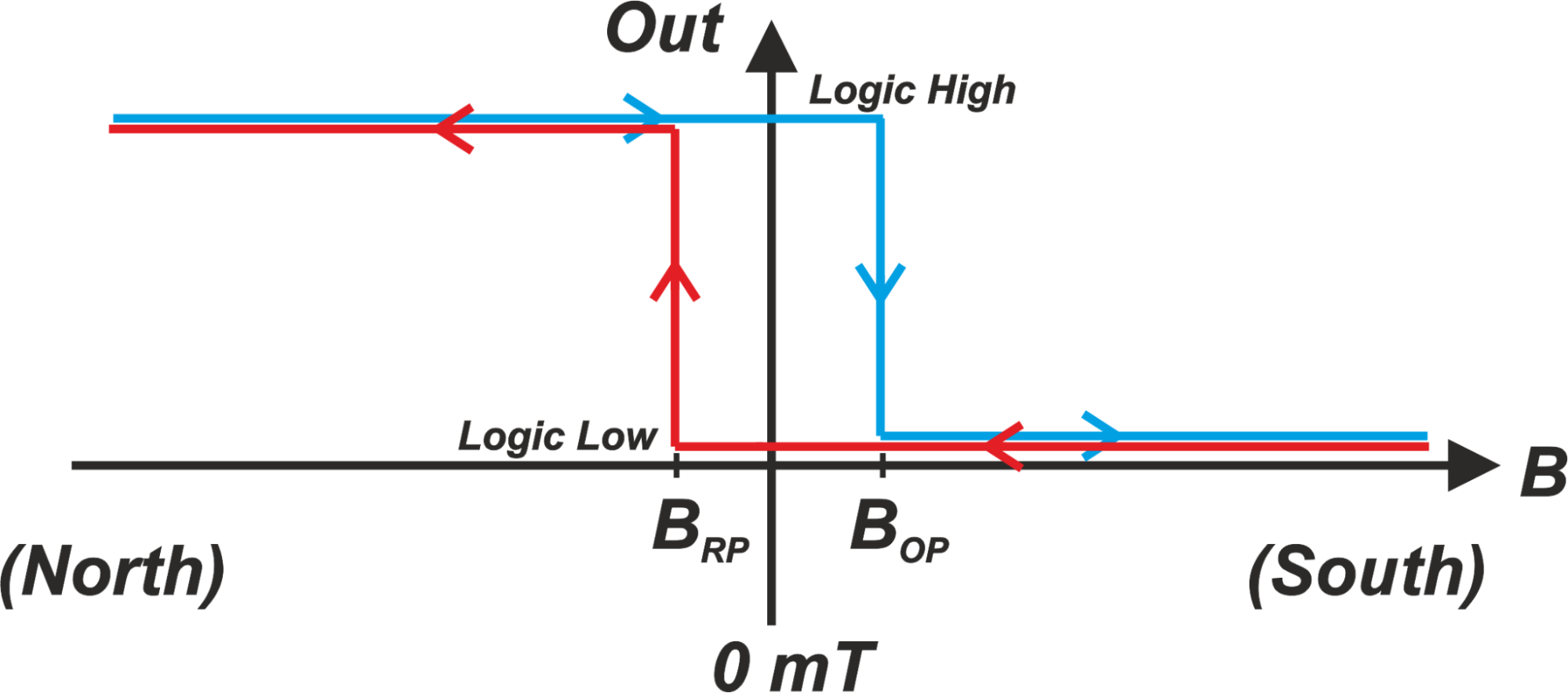
図6
ラッチデバイスには正のB OP があります 負のB RP 。十分に大きな正のフィールド(B> B OP )によってオンになります )そして十分に強い北極性フィールド(B RP )の存在下でオフになります )。デバイスのヒステリシスには、B =0付近の領域が含まれ、BRPからB OP の範囲です。 。デバイスはヒステリシス領域で状態を変化させないことがわかっています。センサーをアクティブにするのに十分な強さの正のフィールドを適用するとします。この磁場を取り除くと、デバイスはB =0の磁場を感知します。センサーにフィールドは適用されませんが、以前の状態を保持してオンのままになります。反対の極性の強いフィールドを適用した場合にのみ、状態が変化します。センサーに弱い磁場がかかったとき(B RP OP )、センサーは以前に生成された出力を保持します。これが、このホールデバイスがラッチと呼ばれる理由を説明しています。
ユニポーラまたはオムニポーラスイッチは、印加された磁場の振幅が変化すると状態を変化させることができますが、ラッチはB磁場の極性を感知できます(印加された磁場に十分な強度がある場合)。ラッチは通常、回転シャフトの位置を検出するなどの回転アプリケーションでリング磁石とともに使用されます。これを図7に示します。
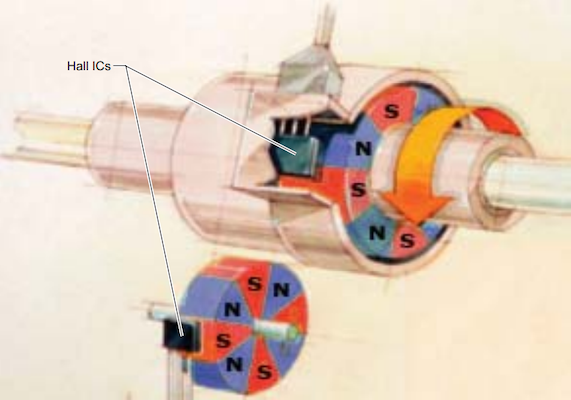
図7。 アレグロの画像提供。
シャフトが回転すると、検出された磁場の極性が変化し、それに応じてセンサーがオン/オフになります。ラッチデバイスを使用すると、動作ポイントとリリースポイントの大きさは同じですが、極性が逆になります(B OP ≠-B RP )。
バイポーラスイッチ
バイポーラスイッチでは、「最大」動作ポイントと「最小」リリースポイントの値しかわかりません。ただし、正確なしきい値は不明です。その結果、デバイスの正確な動作はユニットごとに変わる可能性があります。図8は、最大B OP の例を示しています。 約300ガウスで最小B RP 約-300ガウスです。
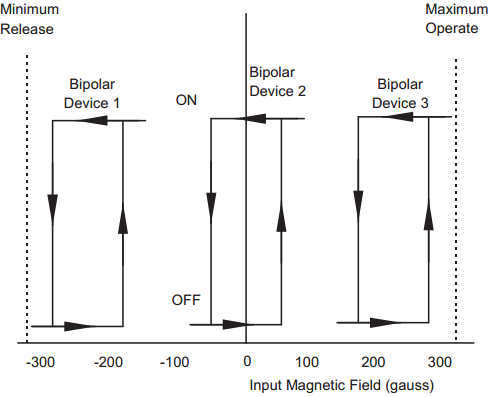
図8。 ハネウェルの画像提供。
「デバイス1」の場合、両方のB OP およびB RP 負です。 「デバイス3」の場合、両方のしきい値が正です。別のサンプル「デバイス2」は、ラッチと同様の応答を示します。正のB OP があります 負のB RP 。 「デバイス2」の伝達関数はラッチの伝達関数に似ていますが、バイポーラスイッチの動作点と解放点の大きさが等しくない場合があることに注意してください(B OP -B RP )。
ご覧のとおり、同じロットで一緒に製造された同じタイプのデバイスでも、3つの異なる伝達関数が可能です。 Allegroの「BipolarSwitchHall-Effect IC Basics」アプリケーションノートによると、「Device1」や「Device3」と同様の伝達関数を持つバイポーラスイッチは約10%にすぎません。残りはラッチタイプの応答があります。ラッチデバイスと比較して、バイポーラスイッチはより狭いヒステリシスゾーンを提供できます(B HYS =B OP − B RP )、その結果、より高い感度。ただし、バイポーラスイッチの動作モードはユニットごとに変わる可能性があるため、B OP のすべての可能な値に対してシステムが正しく機能することを確認する必要があります。 およびB RP (指定された範囲内)。
私の記事の完全なリストを表示するには、このページにアクセスしてください。
センサー