


ホール効果位置検出:スライドバイ構成の応答直線性とスロープ
ホール効果検知ソリューションに関するさまざまな決定(特にスライドバイ構成)が設計にどのように影響するかを学びます。
ホール効果センサーは、位置検出のための効率的なソリューションを可能にします。ホールセンサーでは、センサーと可動部の間に機械的な接続がないため、より高い信頼性と耐久性を実現できます。
ホール効果ベースの位置検出アプリケーションで使用できるいくつかの異なる磁石センサー構成があります。この記事では、線形のガウス対距離曲線を生成できるスライドバイ磁気構成について説明します。また、磁石の組み合わせを使用して、ガウス対距離曲線の傾きを調整できることもわかります。
直線性が決定要因になる可能性がある
前回の記事では、単純な正面構成とスライドバイ構成について説明しました。これらの2つの配置を図1に示します。
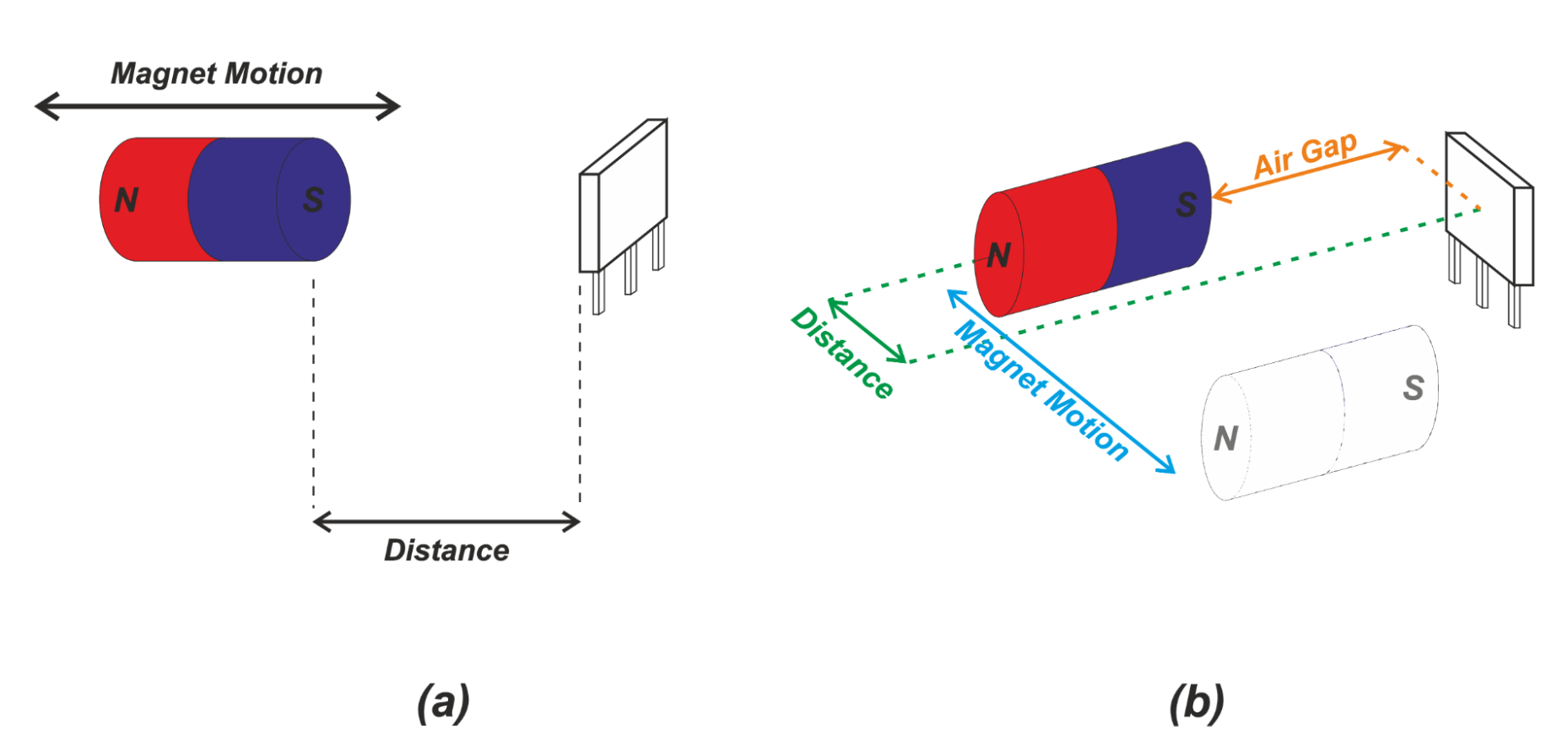
図1(a)。 正面から(b) スライドバイセンシング。
検出されたフィールドと距離の関係は、上記の配置では非線形であることがわかりました。これらの磁石センサー構成は、通常、精度要件がそれほど厳しくないアプリケーションで近接検出器として使用されます。
ただし、検出ストロークに沿った位置の微調整が必要な場合は、センサー出力と変位の間に線形関係を持たせることをお勧めします。実際、ソフトウェアを使用してセンサーの線形性エラーを除去することはできますが、測定精度が向上し、システムのキャリブレーションが容易になるため、線形応答を持つことが望ましいです。
線形スライド-センシングによる
図2(a)は、検出された磁場のz成分と磁石の変位の間に線形関係を示すスライドバイ配置を示しています。図2(b)は、磁束密度(z軸方向)と磁石の移動量の関係を示しています。
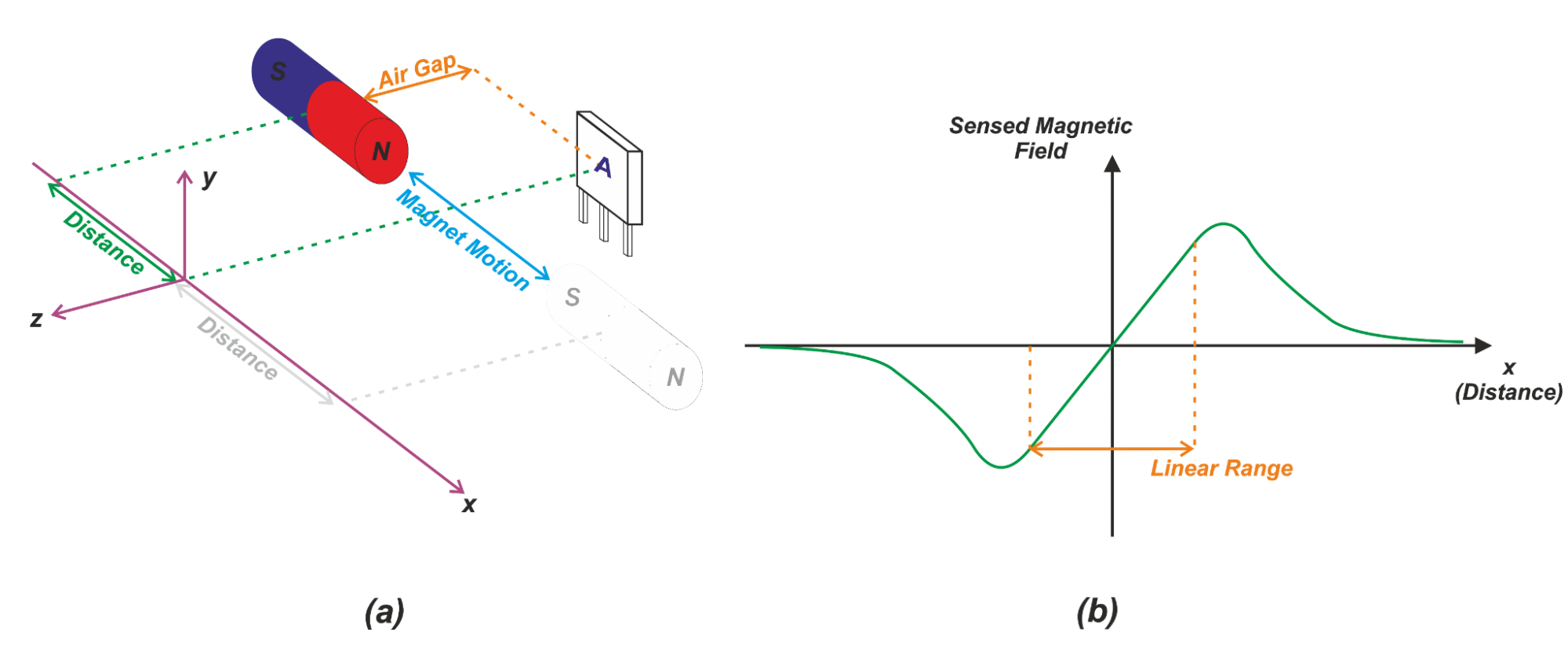
図2(a)。 線形応答のスライドバイ構成(b) 磁束密度と磁石の位置
磁石がセンサーの左側にある場合(x <0)、磁石の磁力線はz軸の反対方向に成分を生成します。力線は磁石の北極から南極に向かっていることに注意してください。
図3は、センサーを通過する力線の1つを示しています。
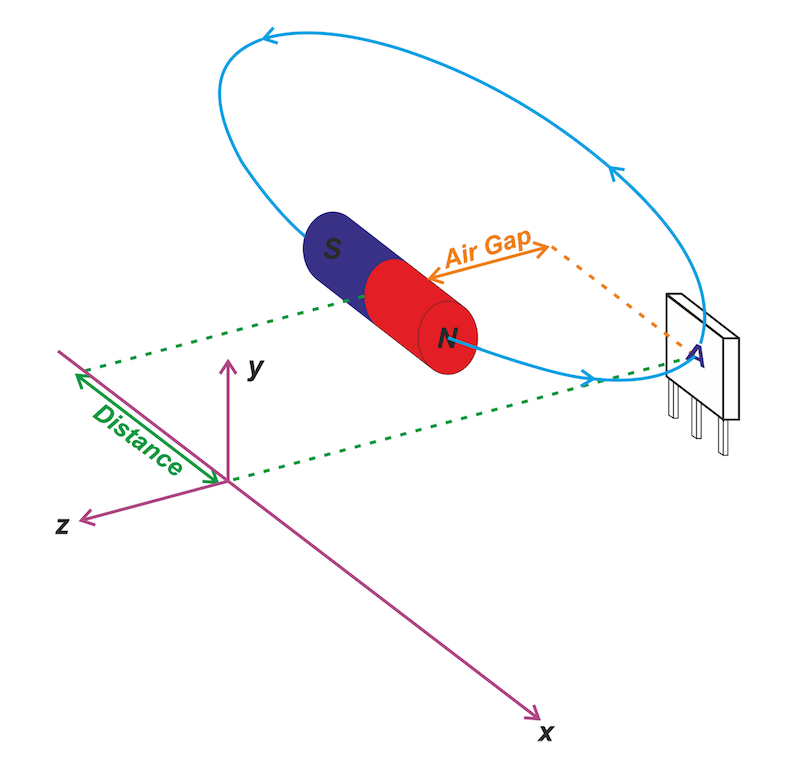
図3。 ホール効果センサーを通る磁力線の方向
したがって、x <0の場合、検出された磁場のz成分は負になります。磁石が中心位置に達すると、z方向の磁場はゼロになります。正の変位(x> 0)の場合、磁場はz軸方向の成分を生成します(正の磁場)。どちらの方向にも大きな変位がある場合、センサーを通過できる力線の数は少なくなります。したがって、センサーが感知する磁場は減少します。
この配置の重要な特徴の1つは、磁場のz成分が原点の周りの変位と線形関係を示すことです。この線形範囲を図2(b)に示します。線形領域の長さは、磁石の長さよりわずかに短いです。たとえば、22 mmの磁石を使用すると、線形領域は約-10mmから+ 10mmまで拡張できます。この線形動作により、移動するオブジェクトの位置をより簡単かつ正確に検出できます。
より広い線形範囲が必要な場合はどうなりますか?
より長い磁石を使用して、上記の構成の線形範囲を広げることができます。ただし、特定のアプリケーションでは、システムに大きな磁石を収容できません。また、磁石が長い場合、コストが制限要因になる可能性があります。磁石の長さより長いストロークを検出する必要がある場合は、センサーのアレイを使用して測定範囲を拡大できます。これを図4に示します。
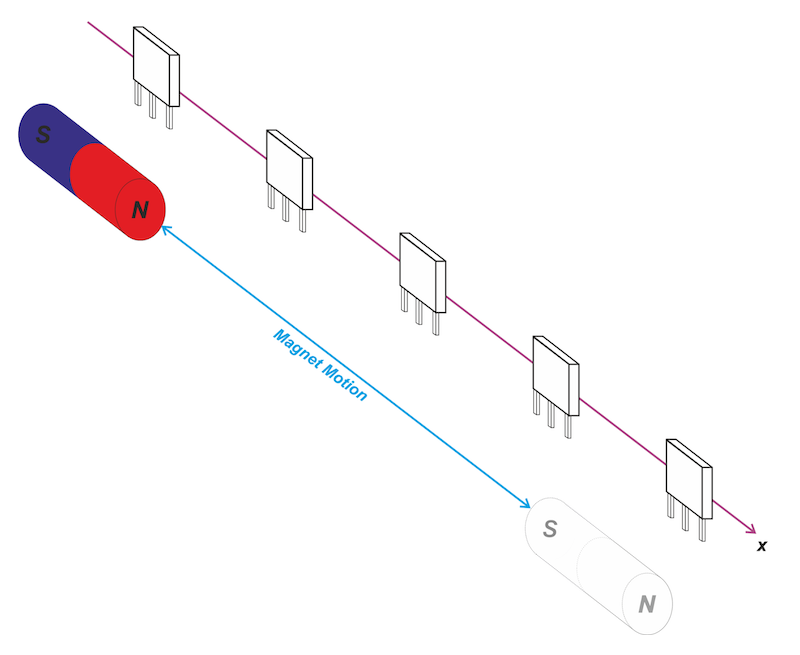
図4。 複数のホール効果センサーを使用して線形範囲を拡大
この場合、オブジェクトの位置を見つけるために、複数のセンサーからのデータを処理する必要があります。詳細については、このTIアプリケーションノートを参照してください。
オブジェクトの存在の検出
図2のスライドバイ構成は、オブジェクトの存在を検出するためにも使用できます(ストローク全体のオブジェクトの位置を決定するのではありません)。図2(a)に示す例では、磁石がx軸に平行に左から右に移動するとします。デジタル(ON / OFF)ホール効果センサーの磁気動作点と解放点が図5のようになっていると仮定します。
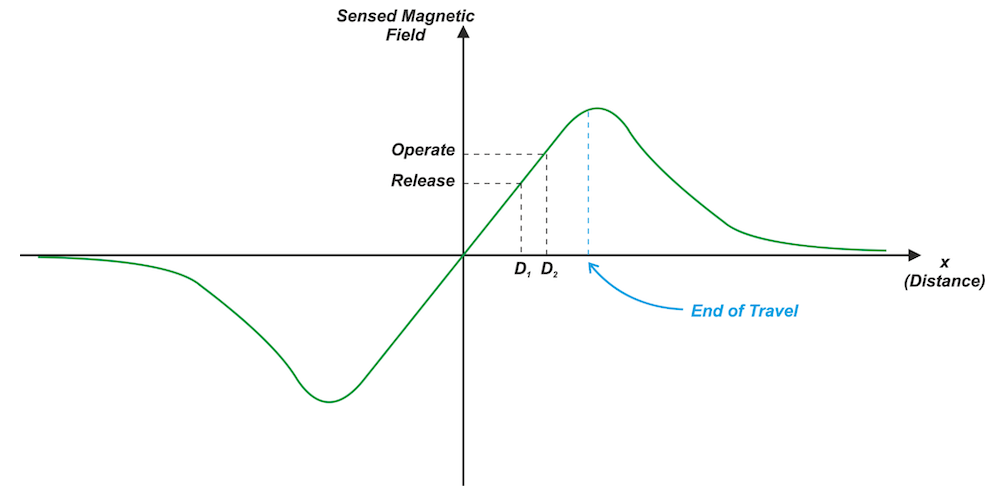
図5。 オン/オフ検知にスライドバイ構成を使用する
磁石がセンサーに左から右に近づくにつれて、磁場の強さはますます大きくなります。 D2では、検出された磁場は、センサーをオンにする磁気動作点に等しくなります。磁石をセンサーに近づけると、さらに大きな磁場が発生し、センサーがオンになります。
ここで、センサーを反対方向(右から左)に動かすと、磁場が減少します。 D1では、磁場はセンサーをオフにするリリースポイントよりも小さくなります。これにより、オブジェクトの存在を検出できます。この構造を使用して、オブジェクトストロークの基準点(センサーの切り替え点)を定義することもできます。
図5の磁束密度と距離の曲線によると、2つの異なる変位によって特定の磁束密度を生成できます。そのため、上記の配置は通常、機械的構造がオブジェクトの移動の終わりを制限し、センサーの切り替えが1つの特定の変位でのみ発生するようなアプリケーションで使用されます。これにより、結果の解釈のあいまいさが防止されます。
ガウス対距離曲線の勾配の増加
デジタル(ON / OFF)ホール効果センサーをスライドバイ構成で使用して、オブジェクトストロークの基準点を定義できることを前述しました。ガウス対距離曲線の傾きを大きくすることができれば、より正確に基準点を検出できます。
傾きが大きくなると、特定の変位によって磁場強度の変化が大きくなり、センサーでより簡単に検出できるようになります。図6(a)は、図2(a)の構成よりも大きな傾きを示す磁気システムを示しています。
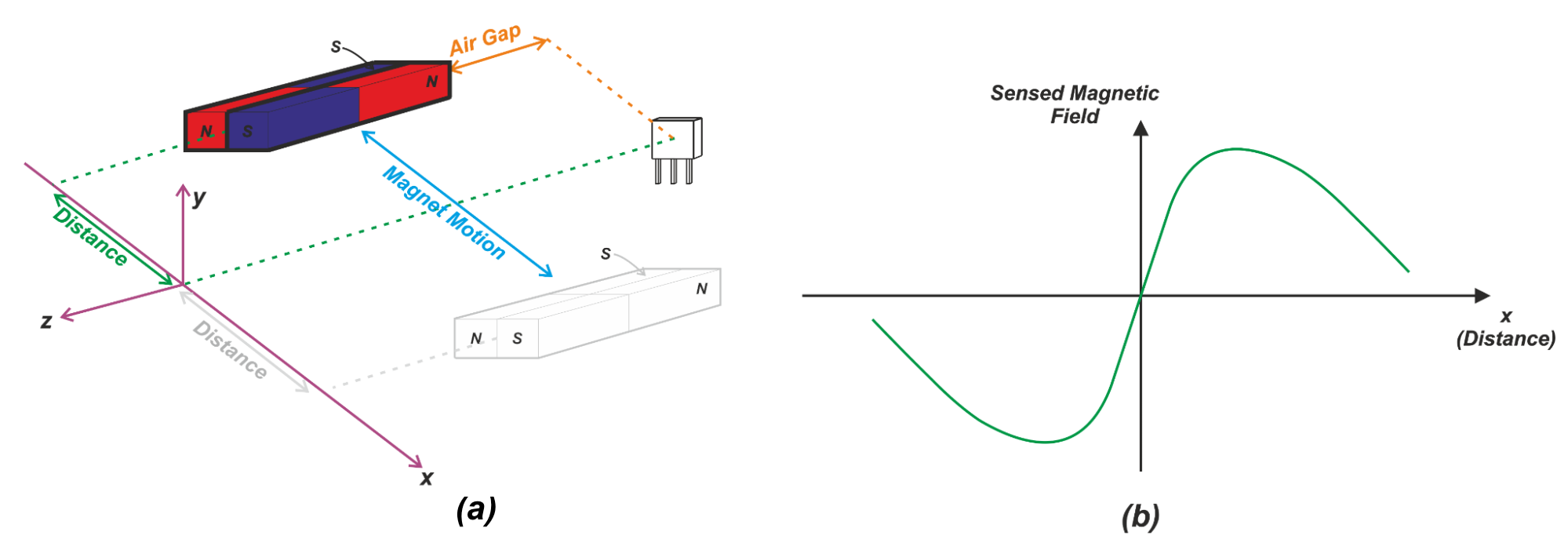
図6。 複数の磁石を使用して電界強度の分解能を向上させる
この場合、一対の磁石の北極と南極がセンサーに対して移動します。全体的な磁場は、両方の磁石からの力線によって決定されます。この配置では、距離は磁石対の中心を基準にして測定されます。図6(b)は、検出された磁場のz成分と距離の関係を示しています。中心位置(x =0)では、センサーを通過する一方の磁石のN極からの力線の数は、もう一方の磁石のS極からの力線の数と等しくなります。したがって、正味の磁束密度はゼロです。
磁石を中心位置(x> 0)から右に動かしたと仮定します。これにより、南極からの磁力線の数が急激に増加し、正のz成分を持つ磁場が生成されます。同様に、磁石を中心位置(x <0)から左に動かすと、負のz成分を持つ比較的強い磁場が得られます。原点付近では、北極から南極への遷移が急激に発生するため、図2(a)のスライドバイ構成よりも曲線の勾配が大きくなっています。ガウス対距離曲線のこの比較的大きな勾配は、移動するオブジェクトの参照位置をより正確に定義するのに役立ちます。
このスライドバイ構成には、他に2つの興味深いバリエーションがあります。 1つのバージョンは、2つの磁石を小さな固定距離で分離します。これにより、北極から南極への急激な遷移が少なくなり、原点の周りの応答の傾きを調整できます。別のバージョンでは、3つの磁石の組み合わせを使用しています。これにより、どちらの方向にも大きな傾きを持つ対称応答を作成できます。対称応答は、中心線からの偏差を検出するときに役立ちます。これら2つの構成の詳細については、Honeywellの「ホール効果センシングとアプリケーション」マニュアルを参照してください。
私の記事の完全なリストを表示するには、このページにアクセスしてください。
センサー
- スロットルポジションセンサー–動作原理とアプリケーション
- ホール効果センサーの動作とアプリケーション。
- Future Electronics:熱画像およびIRセンシングのための迅速な開発プラットフォーム
- ADI:生物学的および化学的センシングのためのインピーダンスおよびポテンシオスタットAFE
- インフィニオンは、ASILDシステム用のモノリシックに統合されたリニアホールセンサーを発表
- Ambarella、Lumentum、ON Semiconductorは、次世代AIoTデバイス向けのAI処理ベースの3Dセンシングで協力しています
- ロボットの手と腕のためのソフトセンシング、自己修復材料
- エグゼクティブ円卓会議:センシングとIIoT
- リモートセンシング用のグラフェンベースのフォトニクスデバイス
- 制御用の接続:位置およびモーションセンサー用の通信インターフェース
- 磁場の検知