


抵抗膜方式センサーブリッジを線形化する2つの手法
抵抗センサーのわずかな抵抗変化を測定することは困難な作業になる可能性があります。ブリッジの非線形性エラーを排除するための2つのハードウェア方法を次に示します。
抵抗センサーの抵抗は、温度や力などの物理的変数に依存します。これらのデバイスの抵抗の変化率は通常わずかです。たとえば、ひずみゲージの抵抗の合計変化は、動作範囲全体で1%未満である可能性があります。
これらの小さな値を見極めるには、非常に正確な測定回路が必要です。ブリッジ回路により、これらの正確な測定をより簡単に実行できます。ただし、線形センサーを使用している場合でも、ブリッジ回路の出力は、測定された物理変数と非線形の関係にある可能性があります。
このような場合、ソフトウェアまたはハードウェアのいずれかの手法を使用して、ブリッジの非線形性エラーを排除できます。この記事では、抵抗性センサーブリッジを線形化する2つの異なる手法を見ていきます。
抵抗膜センサーのブリッジ非線形性
次の線形応答を持つ抵抗圧力センサーについて考えてみます。
\ [R_ {sensor} =R_0 + Mx \]
ここで、R 0 はゼロ圧力でのセンサーの初期抵抗、xは測定量(圧力)の値、Mはセンサー応答の傾きです。将来の方程式を簡単にするために、Mの値がセンサーの初期抵抗の値(R 0 )に等しいと仮定しましょう。 )したがって、センサーの応答は\ [R_0(1 + x)\]です。
通常、抵抗センサーの抵抗の変化率は小さく、正確な測定をより簡単に実行するには、ブリッジ回路を採用する必要があります。このセンサーの一般的なブリッジ構成を図1に示します。
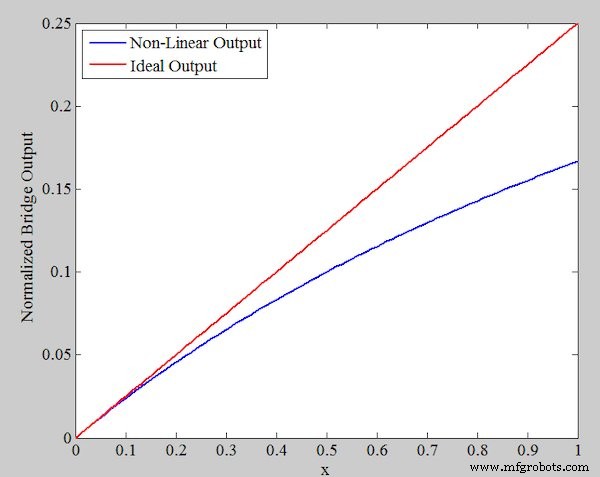
図1。 抵抗センサーの一般的なブリッジ構成
ブリッジの他の3つの抵抗の抵抗はR 0 であることに注意してください。 。このブリッジ抵抗の選択により、出力の感度が最大になります(V out )センサー抵抗の変化に。出力方程式は次のように取得できます。
\ [V_ {out} =V_A --V_B =V_r \ left(\ frac {R_0(1 + x)} {R_0 + R_0(1 + x)}-\ frac {1} {2} \ right)\]
これにより、次のように簡略化されます。
\ [V_ {out} =V_r \ left(\ frac {x} {2(2 + x)} \ right)\]
式1。
ご覧のとおり、ブリッジ出力と抵抗値(x)の変化の関係は線形ではありません。 \ [x \ ll2 \]を使用すると、次の線形関係によって上記の方程式を近似できます。
\ [V_ {out} \ approx V_r \ left(\ frac {x} {4} \ right)\]
式2。
図2は、ブリッジの正規化された出力を示しています\ [\ frac {V_ {out}} {V_r} \] 実際の場合(式1)と理想的な出力(式2)の両方について。
図2。 式1および2の非線形(青)および理想(赤)出力
予想どおり、線形応答からの偏差はxとともに増加します。
どのくらいの非線形誤差が発生しますか?
上記のブリッジ回路の非線形性誤差を定量化してみましょう。式1は次のように書き直すことができます。
\ [V_ {out} =V_r \ left(\ frac {x} {4} \ right)\ left(\ frac {1} {1+ \ frac {x} {2}} \ right)\]
それを仮定すると \ [\ frac {x} {2} <<1 \]、テイラーの定理を使用して、上記の関数の近似値を次のように取得できます。
\ [V_ {out} =V_r \ left(\ frac {x} {4} \ right)\ left(1- \ frac {x} {2} \ right) \]
この結果を式2と比較すると、誤差の大きさを次のように計算できます。
\ [E_ {Non-Linearity} =V_r \ left(\ frac {x} {4} \ right)\ left(\ frac {x} {2} \ right) \]
これを式2で与えられる期待される理想値で割ると、抵抗(x)の特定の変化に対するエンドポイントの線形性誤差のパーセンテージを取得できます。
\ [パーセンテージ〜エラー=\ frac {x} {2} \ times 100 \%\]
非線形誤差の計算例
応答が\ [R_ {sensor} =R_0(1 + x)\]のセンサーについて考えてみます。 \ [R_0 =100〜 \ Omega \]であり、動作範囲全体にわたるxの最大値が0.01であると仮定します。最大直線性エラーのパーセンテージは次のようになります:
\ [パーセンテージ〜エラー=\ left(\ frac {0.01} {2} \ right)\ times 100 \%=0.5 \%\]
ソフトウェアを使用してセンサーの直線性エラーを除去できる場合もありますが、線形応答を使用すると、測定精度が向上し、システムのキャリブレーションが容易になるため、線形応答が望ましいことに注意してください。ブリッジ回路を線形化するために使用できるさまざまな回路トポロジがあります。
この記事の残りの部分では、2つの異なるブリッジ線形化手法について説明します。
方法1:抵抗の変化に比例した電圧を作成する(x)
この記事で説明する最初の線形化手法を図3に示します。最初にこの手法の基本的な考え方を調べてから、図3の回路がこの考え方をどのように実装するかを見てみましょう。
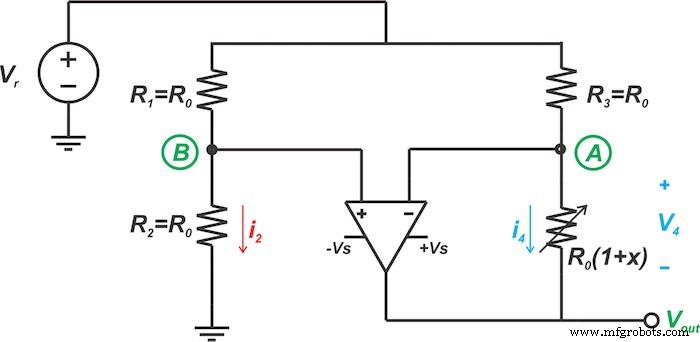
図3。 抵抗膜方式センサーブリッジを線形化するための回路の1つのタイプ
図4は、\ [I_ {Ref} \] の固定電流の描写を示しています。 リニアセンサーを強制的に通過させます。
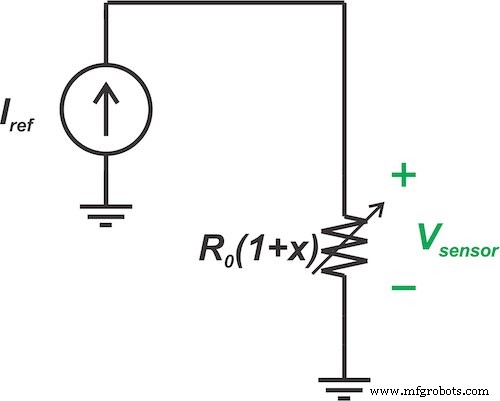
図4。 固定電流(I Ref )線形センサーを強制的に通過
このシナリオでは、センサーの両端の電圧は次のようになります。
\ [V_ {sensor} =I_ {Ref} \ times R_0(1 + x)\]
次のように再配置できます:
\ [V_ {sensor} =R_0 \ times I_ {Ref} + R_0 \ times I_ {Ref} \ times x \]
第1項は定数値ですが、第2項はセンサー抵抗(x)の変化に比例します。定数項を省略できれば、xと線形関係にある電圧になります。
回路の実装
図3の回路は、上記のアイデアを使用してブリッジ回路を線形化します。オペアンプの入力には理想的には電流が流れないため、ノードBの電圧は次の一定の値になります。
\ [v_B =\ frac {R_0} {R_0 + R_0} V_r =\ frac {V_r} {2} \]
負のフィードバックとオペアンプの高ゲインにより、オペアンプの反転入力と非反転入力の両方が同じ電圧になります。
\ [v_A =v_B =\ frac {V_r} {2} \]
R3の両端は定電位であるため、定電流が流れます。言い換えると、オペアンプはR3を電流源として機能させ、センサーに\ [\ frac {V_r} {2R_0} \]の定電流を強制的に流します。したがって、センサーの両端の電圧は次のようになります。
\ [V_4 =\ frac {V_r} {2R_0} \ times R_0(1 + x)=\ frac {V_r} {2} + \ frac {V_r} {2} x \]
最初の項は、V out から削除する必要がある定数値です。 方程式。 2番目の項は、センサーの抵抗変化(x)に比例し、出力式に表示されます。キルヒホッフの電圧法則を適用すると、V out として:
\ [V_ {out} =-V_4 + V_A =-\ left(\ frac {V_r} {2} + \ frac {V_r} {2} x \ right)+ V_A \]
したがって、必要なのはV A だけです。 \ [\ frac {V_r} {2} \]と等しくなります。これはすでに満たされているため、次のようになります。
\ [V_ {out} =-\ frac {V_r} {2} x \]
したがって、出力はxと線形関係にあります。
方法2:抵抗の変化に比例した電流を作成する(x)
この記事で説明する2番目のブリッジ線形化手法を図5に示します。
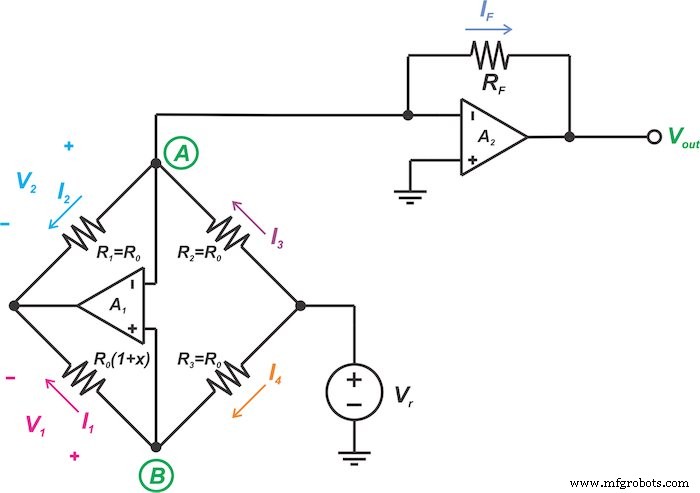
図5。 抵抗センサーブリッジのアナログ線形化のための別の回路
この手法の基本的な考え方をもう一度見てから、その回路の実装を調べてみましょう。
この2番目の線形化手法を図6に示します。
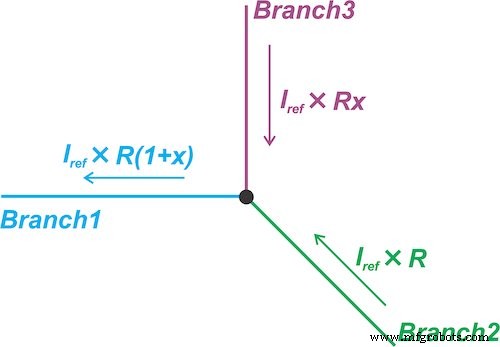
図6。 回路の分岐を流れる電流をセンサーの抵抗に比例させる線形化手法
回路の分岐(分岐1)を流れる電流を、センサーの抵抗に比例させます。
\ [I_1 =I_ {Ref} \ times R_0(1 + x)\]
ここで、I Ref は定数値です。次に、現在のドメイン減算を実行して、定数項\ [I_ {Ref} \ times R_0 \]を削除します。このため、ブランチ2を流れる電流は\ [I_ {Ref} \ times R_0 \]に設定されます。したがって、ブランチ3を流れる電流は\ [I_ {Ref} \ times R_0x \] — になります。 センサー抵抗(x)の変化に比例します。
回路の実装
図5の回路が上記のアイデアをどのように実装しているかを見てみましょう。この場合も、負のフィードバックとオペアンプの高ゲインにより、2つのオペアンプ(両方ともA 1 )の反転入力と非反転入力の両方が強制されます。 およびA 2 )同じ電圧にする:
\ [v_A =v_B =0 \]
式3。
したがって、 V 1 があります。 =V 2 につながる
\ [R_0(1 + x)\ times I_1 =R_0 \ times I_2 \]
これにより、次のように簡略化されます。
\ [I_2 =I_1 + I_1 \ times x \]
式4。
I 1 =I 4 そして、式3を考慮に入れると、次のようになります。
\ [I_1 =I_4 =\ frac {V_r --v_A} {R_0} =\ frac {V_r} {R_0} \]
これを式4に代入すると、次のようになります。
\ [I_2 =\ frac {V_r} {R_0} + \ frac {V_r} {R_0} \ times x \]
したがって、 I 2 定数値とxに比例する項の合計です。出力電流方程式の定数項を削除するには、キルヒホッフの現在の法則を使用するだけで済みます。 R2を流れる電流は、\ [\ frac {V_r} {R_0} \] に等しい電流を供給します。 ノードAに移動し、次のようになります:
\ [I_F =-\ frac {V_r} {R_0} \ times x \]
したがって、次のようになります。
\ [V_ {out} =V_r \ times \ frac {R_F} {R_0} \ times x \]
図5の回路には、最初の手法と比較して追加のオペアンプが必要です。ただし、2つのオペアンプソリューションでは、\ [\ frac {R_F} {R_0} \]比を選択することでゲインを任意に設定できます。
私の記事の完全なリストを表示するには、このページにアクセスしてください。
センサー