


裏面照射型が高速化
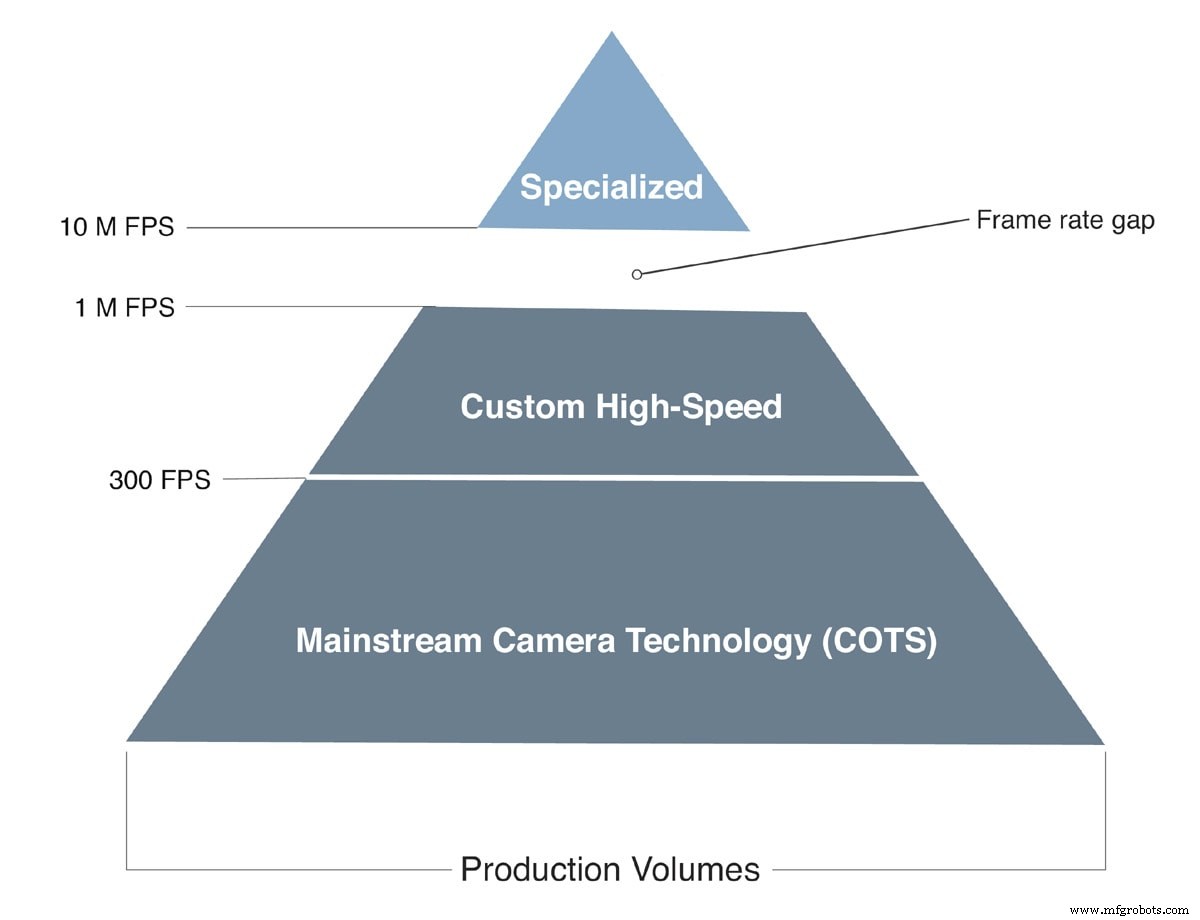
1秒あたり100万フレームを超える速度を備えた高速イメージングは、科学および工学アプリケーションで最もつかの間のイベントをキャプチャできる非常に貴重な研究ツールです。しかし、この速度を達成するには、紐が付いています。ほとんどの高速度カメラは、最大ギガピクセル/秒(Gpx /秒)のスループットを実現するように設計されており、フレームレートと解像度のトレードオフで提供されます。たとえば、25 Gpx /秒のカメラは1280×800ピクセルの解像度で25,700フレーム/秒(fps)に達し、1280×720の小さな解像度で28,500のより高いフレームレートを達成できます。どちらの組み合わせもほぼ同じスループットを実現します。 。 100万fpsなどの非常に高いフレームレートでは、解像度が非常に低くなり、主題を確認するのが難しくなります。
フレームレートが上がると、ピクセルが照らさなければならない露出時間は短くなります。 25,700 fpsの場合、各フレームの最大露出時間は39マイクロ秒(µs)であり、100万fpsの場合、最大露出時間はわずか733ナノ秒(ns)です。短い露光時間は、ピクセルが光を受け取る短い時間を補うために高レベルの照明を必要とします。実際、多くの高速アプリケーションは光が不足しています。つまり、高いフレームレートでの露光時間が非常に短い場合、利用可能な照明はカメラの画像センサーに十分な光を供給せず、理想的な画像を生成できず、実用的でない場合もあります。特定のアプリケーションで。
高速度カメラのオペレーターは、速度と解像度の必要性と適切な照明の必要性のバランスをとることに長けています。科学的理解と工学的分析の最前線を前進させる壮大な画像をキャプチャすることはできますが、ユーザーが高速イメージングの限界を押し上げるにつれて、トレードオフの管理がより困難になります。

最近、速度-解像度-感度の制約を緩和する技術的なブレークスルーが行われました。裏面照射型(BSI)を採用した新しい高速イメージセンサーを開発し、光子を取り込むことができるピクセルの表面積を増やしました。 BSIセンサーは、光の取り込みに効果的であるため、高いフレームレートを必要とするアプリケーションに適しています。このカメラでは、スループット(最大フレームレート×最大フレーム解像度)が、前世代の高速CMOSイメージングセンサーと比較して3倍に増加しました。新しいセンサーは、2021年3月に新しいPhantom TMXカメラでデビューしました。その中で最も速いものは、1280×800ピクセルのフル解像度で76,000fpsを撮影できます。
BSIを高速アプリケーションにもたらす
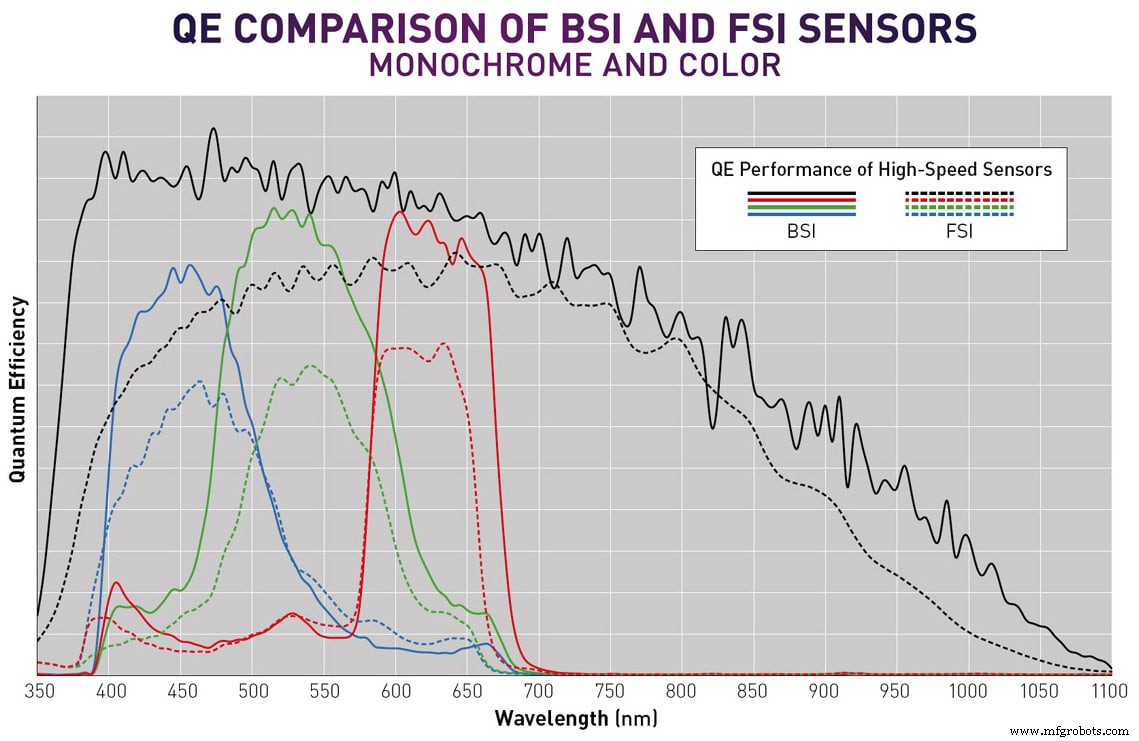
これまで、高速度カメラで使用されるCMOSセンサーは、フロントサイドイルミネーション(FSI)アーキテクチャに基づいており、ピクセルのフォトダイオードの上にあるセンサーの金属回路が光源に面しています。この金属回路は、一部の入射光がピクセルに到達するのを防ぎます。これにより、曲線因子に影響を与え、センサーの感度が低下します。

BSIセンサーは、金属スタックの上部に取り付けられた厚いキャリアウェーハを使用して設計されています。この配置により、バルクシリコンを薄くして反転させ、光源に面するダイオードとその背後の金属表面を露出させることができます。高速でのBSIセンサーには、2つの重要な利点があります。光が受信面に到達するための直接ルートを提供することによるフィルファクターの向上(図1を参照)と、センサーの金属に金属を追加することによる処理速度の向上です。表面。
-
改善された曲線因子: 入射光をキャプチャする際のこの効果は、センサーの曲線因子、つまりフォトンをキャプチャできるピクセル表面積のパーセンテージで表されます。金属回路が光の一部を遮断または反射するため、高速イメージングで使用される一般的なFSIセンサーの曲線因子は50〜60%であり、一般的な現在のFSIセンサーのマイクロレンズによって部分的に補正されます。回路を邪魔にならないように移動することで、この新しいBSIセンサーの曲線因子は100%に近くなります。
-
処理速度の向上: ピクセルアレイの基本速度は、抵抗-コンデンサ(RC)時定数によって制限され、金属を追加すると抵抗が減少し、速度が増加します。 FSIセンサーでは、光がフォトダイオードに到達できるように、センサー前面の金属の量が制限されています。この制約により、処理速度にオーバーヘッドが生じます。フレームレートが増加し、解像度が低下すると、オーバーヘッドが失われるため、カメラは最大Gpx/秒のスループットを提供できなくなります。 BSIセンサーにはこの制約がなく、金属回路を大幅に増やすことができ、オーバーヘッドを大幅に削減または排除することさえできます。この機能により、BSIセンサーは、非常に高いフレームレート/低解像度の組み合わせでも、最大Gpx/秒のスループットを維持できます。
BSIセンサーは、さまざまな携帯電話や標準のデジタルカメラで10年以上使用されています。これらの消費者向けカメラの低照度性能とダイナミックレンジの改善に関しては、実証済みの利点があります。これらのセンサーを高速イメージングに導入するのになぜこれほど時間がかかったのですか?一言で言えば、サイズ。
高速度カメラで使用されるセンサーとピクセルは、速度と解像度と感度のトレードオフを最小限に抑えるために、標準のカメラよりもはるかに大きくなっています。たとえば、携帯電話のカメラのピクセルは片側2 µm未満ですが、この新しいイメージセンサーのピクセルは通常、片側6 µmを超え28 µmです。
BSIセンサーの製造プロセスは、同等のFSIセンサーよりも本質的に困難であり、追加の製造ステップが必要です。その中には、バルクシリコンを除去してフォトダイオードを光源に近づけるためのウェーハバックシンニングステップがあります。表面をアニールし、表面に電気接点を提供するために、ウェーハの裏面にも追加の処理ステップがあります。高速イメージセンサーのサイズは、製造上の問題を悪化させるだけです。半導体経済学の現実はまた、技術を大量生産の標準カメラから比較的少量の高速画像センサーに移すことを困難にしました。製造プロセスを完成させ、実用的な歩留まりを達成するには時間がかかりました。
BSIイメージセンサーは待つ価値があります。次の新しい基準を設定します:
-
速度。 センサーを使用する最初のカメラは、フル1メガピクセル(1280×800)の解像度で76,000 fpsで画像をキャプチャし、解像度を下げてビニングを行うと、1桁以上の速度に到達できます。たとえば、カメラは1280×32および640×64ピクセルのビニングの解像度で175万fpsで最高になります。歴史的に、100万fpsを超えるフレームレートに関連する解像度は、ほとんどすべての科学的用途には低すぎましたが、1280×32は、幅広いアプリケーションで真に使用可能な解像度を表しています。
-
露出時間。 新しいセンサーは、ExportControlledFASTオプションを使用して95nsの最小露光時間をサポートします。露光時間が短いため、モーションブラーなしでこれまでになく高速なイベントをキャプチャできます。これは、サイトメトリーや燃焼分析などの幅広いアプリケーションで高品質の画像を取得する際の制限要因となる可能性があります。
-
ピクセルサイズ。 光が不足している状況で動作するために、高速度カメラは歴史的に、可能な限り多くの光子を捕らえる手段として非常に大きなピクセルサイズを使用してきました。たとえば、既存のFSI超高速センサーのピクセルサイズは、片側28 µm、面積784 µm 2 です。 。新しいBSI高速イメージセンサーは、サイドピクセルあたり18.5 µmですが、光のキャプチャに習熟しているため、28 µmピクセルの以前のFSIセンサーの3倍の速度で感度が高くなります。ピクセルが小さいほどサンプリング周波数(ナイキスト)も向上し、エイリアシングの前にセンサーがより高いlp/mm空間周波数を解決できるようになります。この機能により、フローサイトメトリー、粒子画像流速測定法(PIV)、デジタル画像相関法(DIC)、およびセンサーの分解能によって制限されるその他の高速アプリケーションでのイメージングシステムのパフォーマンスが向上します。
BSIを超えて
新しいイメージセンサーの設計に関連するパフォーマンスの飛躍的進歩は、主にそのBSIアーキテクチャに基づいていますが、設計にはそれ以上のものがあります。新しいセンサーには、BSIだけで達成できる以上のパフォーマンスを向上させる多くの設計機能もあります。特に、大量の画像データを高速で読み取り、スループットを向上させる機能に関連しています。
アナログからデジタルへの変換の課題を解決します。 CMOSイメージセンサーにアナログ-デジタルコンバーター(ADC)を埋め込むのが標準的な方法ですが、BSIセンサーの速度では、ADCの量を大幅に増やす必要がありました。最新のCMOSイメージセンサーには通常1,000〜10,000個のADCが組み込まれていますが、新しいBSI高速センサーには40,000個のADCがあり、それぞれが523 nsごとに変換し、センサーからオフロードするために大量のデータを生成します。このタスクを実行するために、5Gbpsを超える速度で動作する160の高速シリアル出力が組み込まれています。このテクノロジーはCPUとFPGAで一般的ですが、高速画像センサーでは新しいものです。
新しいセンサーのADCの密度は、電力管理と電気的クロストークの課題を生み出しました。これらは、設計と統合された生産パートナーであるForzaSiliconの助けを借りて解決されました。シミュレーションはセンサーのパフォーマンスを予測するためによく使用されますが、このセンサーでは、予測を提供するためにシミュレーションで数週間計算する必要がありました。
Forzaは、シミュレーションを簡素化し、実際の結果と予測された結果を分析して、設計を迅速に変更するという豊富な経験を持っています。 BSIセンサーの場合、初期の設計のテストでは、通常のイメージングモードとビニングモードの両方で、シミュレーションツールが予測したよりも高いレベルのADCクロストークが明らかになり、画像に顕著なアーティファクトが発生しました。 Forzaのエンジニアは、クロストークが予測可能なパターンを示すことを発見し、クロストークを完全に排除するのに役立つモデリング技術を開発しました。これにより、イメージングアーティファクトが軽減されました。
最大スループットのためのビニング。 センサーは2×2ビニングをサポートし、より高速でスループットを最大化します。高速センサーでは一般的ではありませんが、以前の2台のカメラにビニングを実装しました。センサーのカラムADCアーキテクチャの制限を緩和するのに役立ち、単にy次元を減らすよりも高速になります。このアプローチは、主に感度を高めるために使用されるCCDカメラで適用されるビニングとは微妙に異なります。この場合、速度を上げるために使用されました。
BSIの違い
BSIは新しいテクノロジーではなく、標準カメラや携帯電話カメラで大きな成功を収めています。高速イメージングに適応させることで、光が不足している状況で速度の限界を押し上げるセンサーが作成されました。
この記事は、チーフサイエンティストのRadu Corlanと、Vision Research(ニュージャージー州ウェイン)のR&D部門VPであるKevinGannによって執筆されました。 Forza Silicon(カリフォルニア州パサデナ)のエンジニアリング担当副社長、LocTruong氏。詳細については、Gann氏にお問い合わせください。このメールアドレスはスパムボットから保護されています。表示するにはJavaScriptを有効にする必要があります。または、こちらにアクセスしてください 。
センサー