


モーターフィードバック用のセンサーを選択する際のオプションはたくさんあります
多くのモーションコントロールアプリケーションでは、モーターのローターまたはその負荷の位置、速度、さらには加速度さえも知る必要があります。アプリケーションと設計の詳細に応じて、モーターコントローラーはこれらのパラメーターを正確に、おおよそ、またはまったく知る必要がない場合があります。モーターの状況とローターの状態を知ることにより、モーターコントローラーは閉ループシナリオになります(図1)。
もちろん、モーターの速度、位置、および加速度は密接に関連しています。速度は位置の導関数(時間変化率)であり、加速度は速度の導関数であるため、1つだけを知っている場合でも、3つの要素すべてを決定できます(補足:速度は加速度と位置は速度の積分です。

ただし、実際には、関連するパラメータを決定するこの方法は、解像度とノイズのために、多くの場合(常にではありませんが)不十分です。たとえば、ローターが別の回転を完了したことを知ると、3つの変数すべてについてわかりますが、解像度は非常に低く、通常は許容できません。アプリケーションに応じて、必要な解像度と精度は、大まかなものから中程度のもの、正確なものまでさまざまです。 CNC工作機械には正確なローター情報が必要であり、自動車のパワーウィンドウコントローラーは概算データを受け入れることができ、衣類の洗濯機または乾燥機は粗い情報のみで満足します。
ループを閉じる
ローターの位置または動きを検知するための最も一般的なオプションは、レゾルバ、光学式または容量性エンコーダー、およびホール効果デバイスで、精度、解像度、およびコストの大まかな降順です。これらのセンサーは、物理的な設計、実装、電気的インターフェースが大きく異なるため、ユーザーは、必要なもの、特定のアプリケーションでの最良の選択、およびセンサーをコントローラーの回路にインターフェースする方法を理解する必要があります。
インクリメンタルエンコーダ(相対位置のみが必要な場合、またはコストが問題となる場合に使用)は、通常、AC誘導モーターで使用されます。対照的に、アブソリュートエンコーダ(各位置で異なるバイナリ出力を提供するため、シャフト位置は絶対的に決定されます)は、サーボアプリケーションで永久磁石ブラシレスモーターとペアになることがよくあります。もちろん、アプリケーションは、増分情報と絶対情報のどちらが必要かを決定する主要な要素です。
現在、ほとんどのモーター制御はデジタル制御ループを介して行われていますが、センサー信号自体はすべてアナログであり、デジタル化する必要があるか、デジタル信号ですが、電圧やその他の属性により、標準のデジタル回路と互換性がありません。一部のフィードバックセンサーは、好みに合わせて調整できる生の出力で提供されますが、多くのセンサーには、標準のI / Oポート、フォーマット、およびプロトコルと互換性のある、調整済みのすぐにインターフェースできる出力もあります。
より多くの解像度は良い考えのように思えるかもしれませんが、実際にはそうではないかもしれません。明らかに良いこと、つまり解像度が多すぎると、不要または有用でない情報の追加処理が必要になるため、システムの速度が低下する可能性があるため、解像度を必要最小限に制限することをお勧めします。
リゾルバー
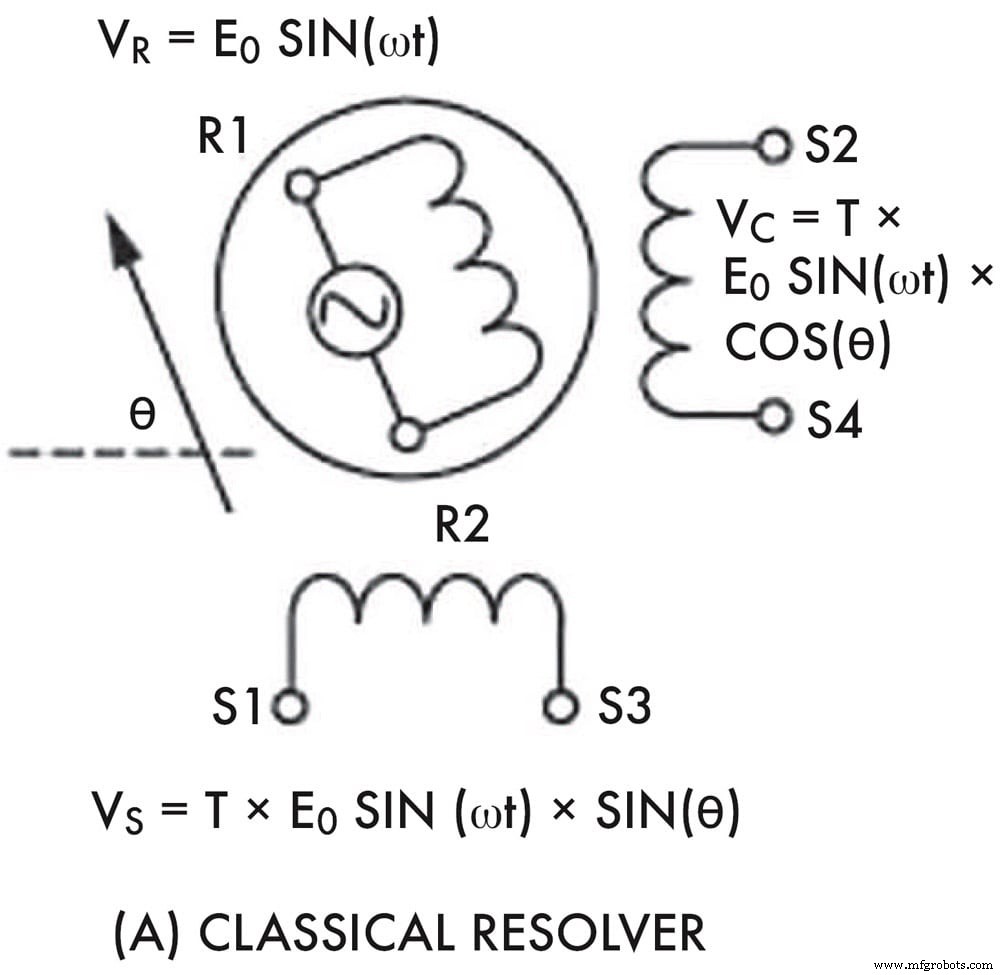
レゾルバは、非常に正確で頑丈な絶対位置トランスデューサです。これらは基本的なトランスの原理に基づいており、1つの一次巻線と2つの二次巻線が相互に直角位相(90°)になっています(図2)。一次巻線と二次巻線の間の実効巻数比と極性は、シャフトの角度によって異なります。一次巻線は、50 Hz / 60Hzから数百kHzの範囲の一定周波数の基準AC波形で励起され、二次巻線の出力は、物理的な配置のために位相がずれます。セカンダリのピーク電圧は、シャフトが回転するにつれて変化し、シャフトの角度に比例します。一次信号を基準としてこれらの出力を復調することにより、レゾルバ回路はシャフト角度の高解像度の読み取りを提供できます。
レゾルバは正確であるだけでなく、頑丈です。レゾルバには、一次側と二次側の間に物理的な接触がなく、モーター自体に加えて個別のブラシやベアリングがなく、部品の摩耗を引き起こす摩擦点がなく、汚染物質(オイルなど)が干渉する可能性がありません。オペレーティング。レゾルバは、その機械的な頑丈さと性能により、軍用銃の角度測定など、非常に困難な状況で広く使用されています。
ただし、レゾルバは他のレゾルバに比べて大きく、比較的コストがかかる傾向があり、比較的大量の電力を必要とします。これは、低電力アプリケーションでは受け入れられないことがよくあります。また、AC波形の生成と復調には比較的複雑な回路が必要ですが、これは最新のICの障害にはなりません。これらは、電源投入時に絶対位置を示し、初期角度をインデックス付けまたは決定するためのモーションを必要としません。この機能は、状況によっては必須であり、他の状況では気にしないでください。
データではなく位置のエンコード

インクリメンタルポジション読み出しの光学式エンコーダー(ここでのエンコーダーという用語はデジタルデータのエンコードとは関係ありません)は、光源(LED)、直角位相の2つの光センサー、およびそれらの間にガラスまたはプラスチックディスクを使用します(図3)。ディスクの中心から放射状に細かくエッチングされた線があり、ディスクが回転すると、センサーは明暗のパターンを認識します。
ディスク上の行数、およびその他のいくつかの手法によって、解像度が決まります。これは通常、1,024、2,048、または1回転あたり4,096カウントにもなります。変圧器のようなレゾルバとは異なり、光学式エンコーダは、長寿命のLEDと効率的な光センサーが開発されるまでマスマーケットのデバイスではありませんでした。
センサーの物理的な配置により、エンコーダーは回転方向を決定できます。基本的な回路は、2つのセンサー(A / B出力と呼ばれる)からのパルス列を、動きと方向の両方を示すビットストリームのペアに変換します(図4)。

エンコーダーは、動きの絶対的な指標ではなく、増分的な指標です。絶対位置を決定するために、ほとんどのエンコーダーは、インジケーターゼロ基準トラックとして3番目のトラックと光センサーを追加します。シャフトは、これが信号を送るためにゼロ基準位置を通過するのに十分に回転する必要があります。真の相対位置の読み取りを光学式エンコーダに追加できますが、これらはユニットを複雑にします。
光学式エンコーダは非常に優れた解像度を提供しますが、レゾルバほど頑丈ではありません。汚れは光路を妨害し、エンコーダディスクが汚れる可能性があります。ただし、それらのパフォーマンスは多くのアプリケーションにとって十分すぎるほどであり、小型、軽量、低電力、インターフェースが容易、そして低コストです。
モーターおよび回転アプリケーション用の一般的な光学式エンコーダは、Avago Technologies(Broadcom)の同様のHEDS-9000およびHEDS-91002チャンネルモジュールです。これらの高性能で低コストのモジュールは、レンズ付きのLED光源と、小さなC字型のプラスチックパッケージに封入された検出器集積回路、およびドライブとインターフェイスの電子機器で構成されています(図5)。それらは、高度にコリメートされた光源と特別な光検出器の物理的配置を備えているため、取り付けのずれに対して非常に耐性があります。 (コードホイールと呼ばれるディスクは、HEDS-9000の解像度が500CPRと1,000CPR、HEDS-9100の解像度が96CPRから512CPRで、別途購入します。モジュールは、TTL互換Aとの2つのチャネルを提供します。 Bデジタル出力および単一の5V電源が必要です。)

CUI AMT10シリーズは、光学式エンコーダの代わりに容量性原理に基づいた光学式エンコーダの代替品です(図6)。これらのエンコーダは、インクリメンタルバージョンとアブソリュートバージョンで利用可能な一連の頑丈で高精度のモジュラーユニットを提供し、ユーザーは4ポジションのデュアル入力を介して16の値から最大12ビット(4,096カウント)の解像度を選択できます。ラインパッケージ(DIP)スイッチ。これらのユニットの相補型金属酸化膜半導体(CMOS)互換のA / B直交出力は、標準のシリアルペリフェラルインターフェイス(SPI)を介して報告されます。

光学式エンコーダとは異なり、CUI AMTデバイスは、エンコーダの可動部分と非可動部分に繰り返しエッチングされた導体パターンを使用します。エンコーダーが回転すると、2つの部品間の相対静電容量が増減し、この静電容量の変化が検出されます。これは、光学式エンコーダーのフォトトランジスターの出力にいくらか類似しています。汚れやその他の汚染物質は、ここではほとんど悪影響を及ぼしません。
レゾルバまたはエンコーダは、取り付けに関する考慮事項と電気的互換性の要件を備えた機械装置でもあることに注意してください。在庫と在庫の問題を最小限に抑えるために、CUIは幅広いスリーブ、カバー、取り付けベースを備えたAMT10シリーズを提供しているため、同じ基本的なエンコーダーをさまざまなシャフトの直径と取り付けで使用できます。
レゾルバーとエンコーダーは、1/100度(0.6分角)以上の解像度で基本的な読み取り値を生成できますが、精度は解像度と同じではありません(ここでも、一部のアプリケーションはこれらの一方を他方よりも重視しています) 。設計でレゾルバとエンコーダのどちらを使用するかに関係なく、温度、変化の追跡速度、望ましくない位相シフト、およびその他の要因が原因でエラーの原因が発生します。ただし、これらのユニットのベンダーは、多くの場合、生のセンサー出力とシステムコントローラーに送られる調整済み出力の間にICベースの回路を使用することにより、これらの欠点の多くを排除、キャンセル、または補償する方法を考案しました。
ホール効果デバイスが強力になります
別のクラスのエンコーディングまたはセンサーデバイスも、広く手頃な価格で入手可能で効果的なものになるために、最新の半導体電子機器とパッケージングを必要とする古くからの原理に基づいています。さらに、ごくわずかな電圧を利用してシステムに簡単に接続できる重要なインターフェイス回路がオンチップで利用できるようになり、このテクノロジの使用がさらに簡素化されました。ホール効果デバイスを使用して、センサーの一部である導体を流れる電流、または近くの磁場の有無を感知できます。

ホール効果として私たちが知っていることは、1879年にエドウィンホールによって発見されました。電位差(ホール電圧)は、導体内の電流と電流に垂直な磁場に対して直角に導体の両端に生成されます(図7)。
一部のホール効果センサーは、センサー要素自体のみを組み込むことをはるかに超えています。 Melexis MLX90367三軸位置センサーは、IC表面に直交および平行に印加される磁束密度に敏感なモノリシック絶対センサーICです。磁束密度の3つの成分に敏感であるため、MLX90367(正しい磁気回路を使用)は、移動する磁石の絶対位置(0〜360°の回転位置など)をデコードできます。

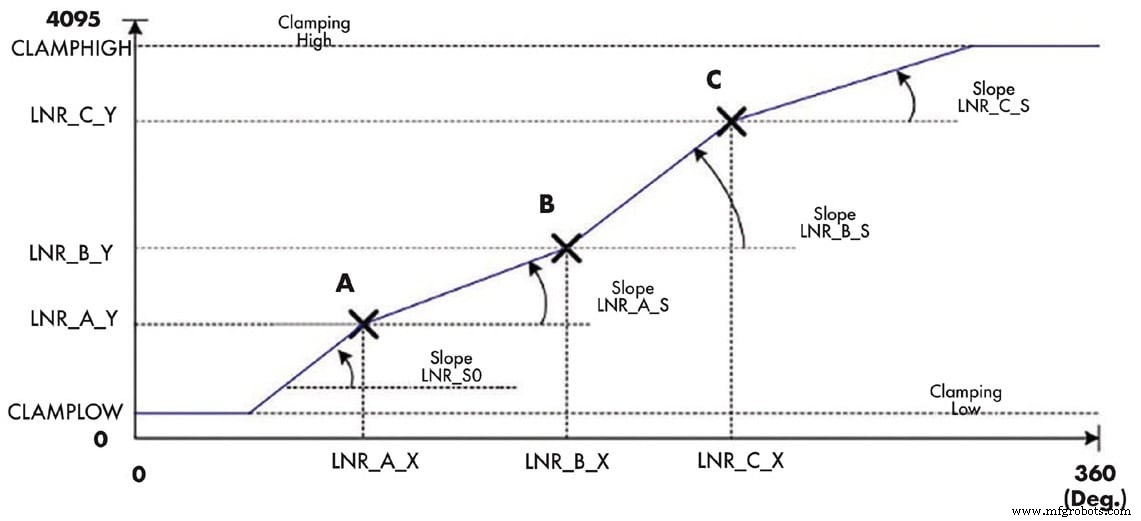
内部的には、この12ビット解像度のデバイスにはマイクロコントローラーとDSPを備えたオンチップ信号処理が含まれているため(図8)、必要な計算に加えて固有の非線形性の補正などを実行できます(図9)。また、自動車アプリケーションで広く使用されているSENT(SAE J2716-2010)と呼ばれるエラー訂正機能が組み込まれた高度なフォーマットを含む、ユーザーが選択可能な幅広い機能、機能、およびさまざまな出力フォーマットをサポートします。
ほとんどのホール効果磁気エンコーダは、モーターシャフトに取り付けられたホイールを使用し、ホイールの周囲には磁化されたN極とS極のセットがあります。これは、光学式エンコーダのスロット付きホイールと磁気的に類似しています。ホイールは通常、ポールアレイに埋め込まれた射出成形フェライトで作られています。一般的なホイールは32極(北16極と南16極)で磁化されているため、分解能は光学式エンコーダやレゾルバよりもはるかに低くなりますが、多くの場合、十分な状況になります。一般的な設置では、ホイールの転流を検知するために、電気的に120°間隔で配置された3つのホール効果センサーがあります。
概要
モーターの位置、速度、または加速度を感知する必要のある設計者には、多くの主要なパラメーターとパフォーマンス属性をカバーするさまざまなオプションがあります。レゾルバ、光学式および容量性エンコーダ、ホール効果デバイスはすべて、長い実績があり、アプリケーションのノウハウによる広範なサポートがあります。
選択は、頑丈さや低電力などの1つの優先要因、または特定の状況での従来の慣習的な使用によって決定されます。使用する基本テクノロジーが決定されると、実行可能なベンダーとそれぞれのパーツが多数利用可能になるため、特定のデバイスに関する決定には、トレードオフをよりよく理解するための調査が必要になる場合があります。
この記事は、テキサス州マンスフィールドのMouserElectronicsのBillSchweberによって書かれました。詳細については、こちらをご覧ください 。
センサー