


ハイパースペクトルカメラとデータ品質
ハイパースペクトルイメージングは、イメージングと分光法の両方を組み合わせたものです。ハイパースペクトルシステムの作成に使用されるさまざまな光学アーキテクチャがありますが、最終的な目標は同じです。画像の各ピクセルに多くのスペクトルバンド(多くの異なる色または波長)からの情報が含まれる画像を作成することです。
優れたハイパースペクトルシステムを作成するのは簡単ではありませんが、品質のみを念頭に置いている場合は、各ピクセルのスペクトル忠実度を最優先する必要があります。つまり、1つのピクセルによってキャプチャされたスペクトルは、その特定のピクセルによって画像化されたシーンの実際の物理的表現です。 。ハイパースペクトルシステムのスペクトル忠実度に影響を与える多くの重要な品質パラメータがあります。さまざまなキー品質パラメータによるスペクトル忠実度への影響は多くの要因に依存しますが、一般的に、最も重要なパラメータは次のとおりです。
-
空間的な位置ずれ
-
スペクトルの誤登録
-
ストレイライト
-
F#
-
スペクトル応答関数
-
検出器パラメータ
-
環境の安定性
ハイパースペクトルシステムのパフォーマンスを評価するには、点像分布関数(PSF)という用語を導入する必要があります。これは、点源から光学系を介して検出器に当たるエネルギーの強度曲線の形状です。
理想的には、プッシュブルームハイパースペクトルシステムでは、空間サンプリングはすべての帯域で同じです。実際には、これは決して真実ではなく、空間的な位置ずれにつながります。
FOVの1つの位置では、PSFの形状、サイズ、および重心の位置は、すべてのバンドで同じである必要があります。設計目標は、FOV内のすべての位置でPSFの形状とサイズを可能な限り類似させることです。実際のアプリケーションでは、空間的な位置ずれ自体 1 空間的な位置ずれを引き起こすさまざまなソース 2 は非常に重要であり、重力の違いがどのように異なるかを示すことができます 3 データ処理の結果を損なう可能性があります。
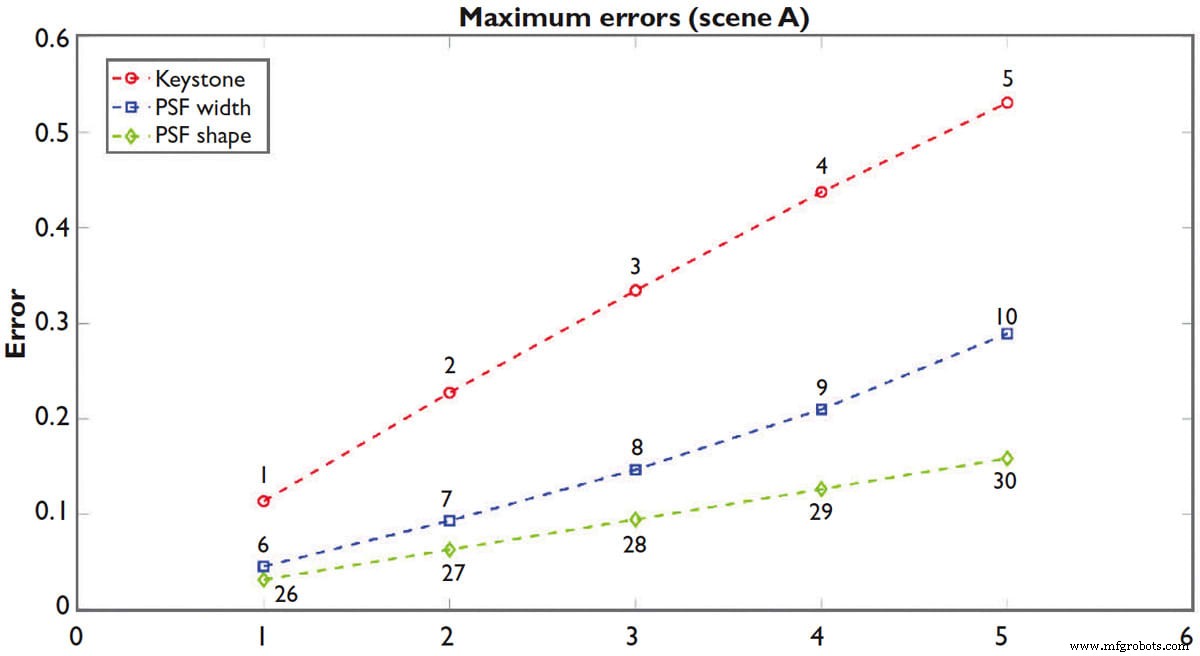
スペクトルの位置ずれは、ハイパースペクトルシステムのスペクトルの忠実度にとっても非常に重要です。空間的な位置ずれと同様に、スペクトルPSFの形状、サイズ、および位置が重要です。スペクトルエイリアシングを回避するには、PSFの幅を2つのスペクトルバンドの近くに保つ必要がありますが、多くの場合、これよりも鋭い光学系が推奨されます。
ピクセルごとおよびバンドごとにシャープな光学系を作成する理由はたくさんあります。特定の検出器について、特定の検出器ピッチで、イメージング分光計は常に鋭い光学系でより多くの情報を出力します。一方、複数のピクセルでPSFをサンプリングすると、PSFに関するより多くの情報が得られますが、特定の検出器では、システムの解像度が低下します。特定の光学システムは常により多くの情報を出力し、点像分布関数(PSF) 4 あたりのピクセル数が多くなります。 。

どのシステムを作成するか、またはユーザーにとってどのシステムを購入するかを決定する際には、多くのトレードオフがあります。光学系の鋭さもその1つです。
もう1つの重要な品質パラメータは、光学システムの迷光です。一般に、迷光は、検出器に到達してはならない場所から検出器に到達する光です。これは、光学系内での反射、光学面からの散乱、機械的面での反射などが原因である可能性があります。迷光効果は、スペクトル範囲ごとに異なる場合もあります。今日、ハイパースペクトルシステムの迷光を測定する方法に関する業界標準はなく、サプライヤごとに測定方法が異なります。
光学系の集光能力は通常、非常に重要なパラメータです(低F#)。システム内の空間ピクセルとスペクトルバンドが多いほど、各ピクセル/バンドに到達する光は少なくなります。これは、高解像度のハイパースペクトルイメージングシステムが非常に光に敏感である必要があることを意味します。このパラメーターの重要度は、プラットフォームによって異なります。ハイパースペクトルシステムが航空機または産業環境に配備されている場合、速度は通常重要なパラメータであり、スペクトル範囲全体で良好な信号対雑音比(SNR)を得るには、低いF#が非常に重要です。逆に、ラボアプリケーションは通常、より遅い画像キャプチャレートを使用し、より長く統合することで、より多くの光を集めることができます。これにより、アパーチャの柔軟性が高まります。

スペクトル範囲全体の高いSNRは、ハイパースペクトルシステムの非常に重要なパラメータであり、SNRがどの程度高いかは、システム全体のスペクトル応答関数に依存します。ピークSNRは、飽和に近い帯域からの最大SNRのみを指定するため、全体像を示すものではありません。また、システム全体の総量子効率が波長の関数として何であるかを知る必要があります。有用な情報を提供するには、特定の入力放射輝度と特定の(および操作上現実的/関連性のある)積分時間/露出に対してSNR曲線を指定する必要があります。
検出器はハイパースペクトルシステムの重要な部分であり、多くの場合、光学システムの設計目標を定義します。 SWIRスペクトル範囲(900〜2500 nm)には、使用可能な検出器の数が非常に限られており、検出器のピクセル数が増えると価格が大幅に上昇します。これは、光学系が検出器用に設計されており、通常は可能な限りシャープになるように設計されているシナリオです。
VNIR範囲(400-1000nm)には多くの検出器があり、光学システムに最も適した検出器を選択できます。 VNIRとSWIRの両方の範囲で、非常に重要な検出器の多くのパラメータがあります。これらは、フルウェル容量、ノイズフロア、読み出しモード、読み出し速度、ピクセルピッチ、波長の関数としての量子効率などです。検出器市場は絶えず変化しており、ハイパースペクトルメーカーが検出器市場に遅れずについていき、利用可能な最高の検出器を統合することが重要です。

使用する校正手順と標準(精度を含む)はユーザーが利用できる必要があり、したがって、NISTまたはPTB標準(または同様のもの)にトレーサブルな放射性校正を行うことが非常に重要です。
ハイパースペクトルシステムは、制御された環境の外で安定した正確な放射分析およびスペクトル校正を維持する必要があります。輸送後および運用中に安定して有効でない場合、完全に校正されたシステムを工場から出荷することは無意味です。つまり、UAV操作などの厳しい条件下でシステムが再現性のある信頼性の高い結果を提供できるようにするには、スペクトル、放射測定、および幾何学的キャリブレーションがさまざまな温度、圧力、および激しい振動の下で安定している必要があります。 5、 6

さまざまなハイパースペクトルシステムをサプライヤのトップレベルのデータシートから区別することは非常に困難です。異なるメーカーのシステム(または同じメーカーの異なるモデル)を比較する場合、その特定のカメラモデルの前述のパラメーターを指定する詳細なレポートをサプライヤーから提供する必要があります。さらに、ユーザーのアプリケーションに関連するシーンからサンプルデータをリクエストすることをお勧めします。
現在、IEEE 7 によって組織された、ハイパースペクトルカメラを特徴付ける共通の標準を作成するためのアクションがあります。 。 HySpexは、ハイパースペクトルイメージングシステムのエンドユーザーにとって製品の透明性を高めることを目的として、このグループをサポートし、深く関わっています。
この記事は、AS(オスロ、ノルウェー)のNorskElektroOptikkのCEOであるTrondLøkeによって書かれました。詳細については、お問い合わせください。このメールアドレスはスパムボットから保護されています。表示するにはJavaScriptを有効にする必要があります。または、こちらにアクセスしてください 。
参考資料
- https://www.spiedigitallibrary.org/conference-proceedings-of-spie/8706/1/Resampling-in-hyperspectral-cameras-as-an-alternative-to-correcting-keystone/10.1117/12.2015491.short
- https://www.spiedigitallibrary.org/journals/Optical-Engineering/volume-59/issue-08/084103/Spatial-misregistration-in-hyperspectral-cameras-lab-photography-and-impact/10.1117/1 .OE.59.8.084103.full?SSO =1
- https://www.hyspex.com/keystone/
- https://www.hyspex.com/sharp_optics_many_pixels/
- https://www.hyspex.com/scientific_grade_uav/
- https://www.hyspex.com/quality_vs620/
- https://standards.ieee.org/project/4001.html
センサー