


スライディングゲート自動化
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
このプロジェクトについて
プロジェクトの概要
このプロジェクトでは、Arduinoの電力を利用して、スライディングゲートに電力を供給する回路を作成します。このプロジェクトの主な目的は、機能しているACモーターを備えたデッドスライディングゲートを利用し、Arduino、2つのリレー、433MHzの受信機、433MHzの送信機、および巧妙な電気技術を使用してシステムを自動化することです。システムは、必要に応じてゲートのモーターに電力を供給し、ゲートを開くか閉じるかを決定する方法を作成します。
Arduinoは、送信機からの設定された応答を常にリッスンします。この場合は、ゲートを開閉するために使用されるリモコンです。送信機は2つのチャネルで動作し、各チャネルには一意のIDがあります。このIDが433MHzの受信機によって受信されると、リレーを制御してモーターに電力を供給するArduinoに信号を送信します。
方法論
ステップ1:モーターへの電力供給
モーターに電力を供給するための構成を以下に示します。モーターがゲートを順方向(閉じる)方向に動かすには、主巻線を主電源に接続する必要があります。
モーターを反対(開)方向に動かすには、二次巻線を主電源に接続する必要があります。
どのワイヤがどの巻線に対応するかを特定する必要があります。通常、ワイヤにはラベルが付いていません。これは、ワイヤにAC電源を供給することで試行錯誤で識別できます。
私の場合、220〜240VACのモーターを使用していました。ニュートラル端子を示すために使用される標準色である青色であるため、ニュートラルワイヤを簡単に識別できました。
次に、ライブ端子を赤い線に接続し、モーターを順方向に回転させました。これは、主巻線に電力を供給したことを示しています。 モーターの。
注: スターターコンデンサが正しく接続され、機能していることを確認してください。これにより、モーターに適切な始動トルクが確保されます。
<図>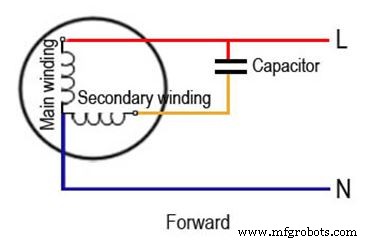 <図>
<図> 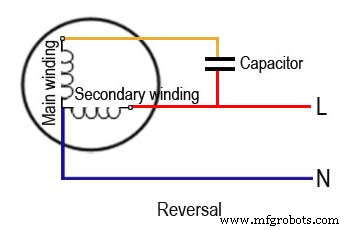
ステップ2:モーターを停止する
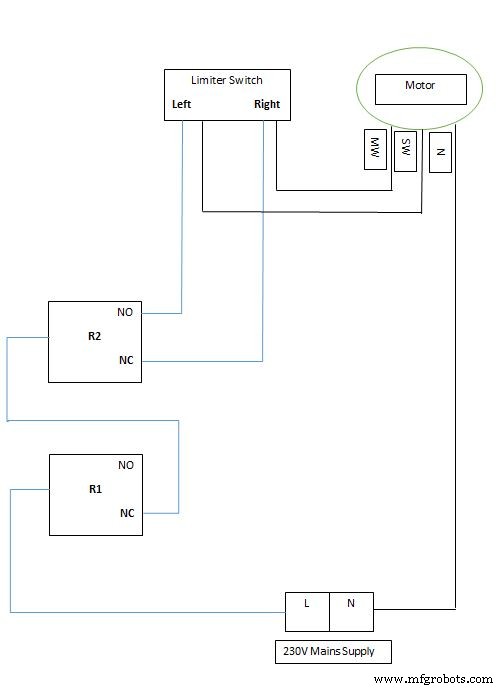
主電源は、リミッタースイッチを介してモーターに供給されます。ゲートが一方の端に達するとすぐに、回路を開き、メインのモーターへの電力供給を停止するリミットスイッチがトリガーされます。
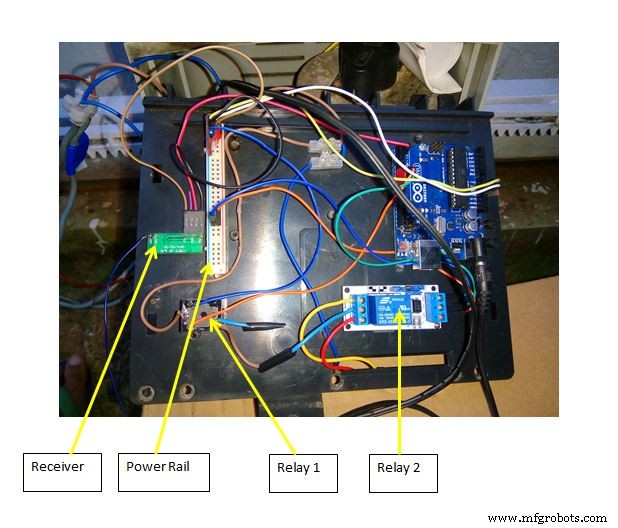
ステップ3:リレーを使用してモーターを制御する
リレーには2つの接点があります。ノーマルオープンとノーマルクローズ。
ノーマルクローズパスは、モーターの主巻線に電力を供給するために使用されます。これは、システムがリセットされたとき、またはシステムに問題が発生した場合に、モーターがゲートを常に閉じたままにすることを保証するために選択されました。
ノーマルオープンパスは、モーターの2次巻線に電力を供給するために使用されます。リレー内のコイルに通電すると、通常開路が閉じます。これは、使用されるリレーが5Vで動作しているため、Arduinoから5V信号を送信することで実行できます。
2つのパスを使用してモーターに電力を供給することにより、モーターの主巻線と二次巻線に同時に電力が供給されないようにします。
このリレー( R2 )はピン8 を介して操作されます Arduinoの。
2番目のリレー( R1 )は、ゲートの移動中にArduinoがレシーバーからコマンドを受信した場合にモーターを停止するために、回路を遮断するために使用されます。
Arduinoは、コマンドを受信したかどうかを常に受信機にチェックします。コマンドが発行されると、Arduinoはモーターに電力を再ルーティングして、ゲートを開閉します。
2番目のリレーの主な目的は、モーターの回転方向を瞬時に変更することなく、システムを再ルーティングしてモーターに電力を供給するのに十分な時間をシステムに与えることです。再ルーティングが完了すると、リレーがオフになり、モーターに電力が供給されて反対方向に回転します。
このリレーはピン9 を介して操作されます Arduinoの。
2番目のリレーの目的
システムがゲートを閉じる途中で、受信機からゲートを開くコマンドを受信すると、リレーがアクティブになり、電力が2次巻線に再ルーティングされます。これはほぼ瞬時に発生するため、リレーは、主巻線への突然の電力の捕捉により、モーターによって生成された逆電圧から一定の圧力下にあります。さらに、継続的にストレスがかかると、リレーの接点が恒久的に損傷します。
追加のリレーの助けを借りて、電源はモーターに切断され、システムに必要な巻線に電力を再ルーティングするための10秒の時間を与えます。これにより、リレーの接点へのストレスが軽減され、リレーの寿命が延びます。
<図>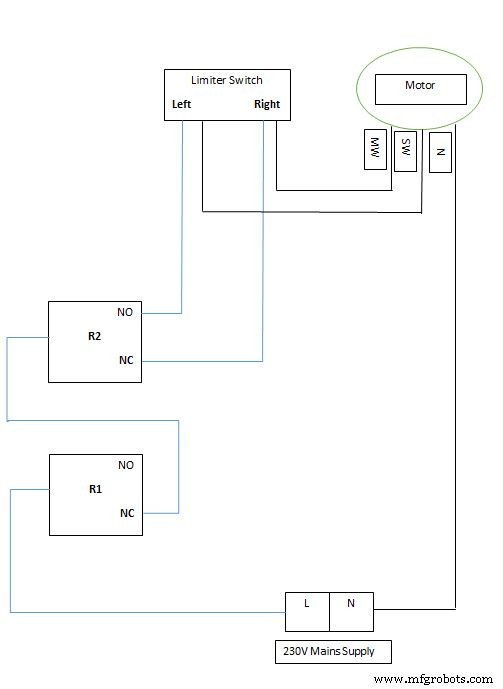
リレー保護方法:
抑制コンデンサ
DCモーターが突然停止すると、モーターのコイルによって負の電流ループが作成されます。これは、コイルの誘導特性によるものです。ただし、これは、フィードバックダイオードを取り付けて、負の電流が流れる経路を提供することで中和できます。
ACモーターがスイッチを介して突然停止すると、スイッチの接点に高電圧が発生します。
抑制コンデンサは、モーターが反対方向に動作するように指示されたときにリレー接点に高電圧が発生するのを防ぐために使用されます。これにより、リレーの連絡先が保護されます。
<図>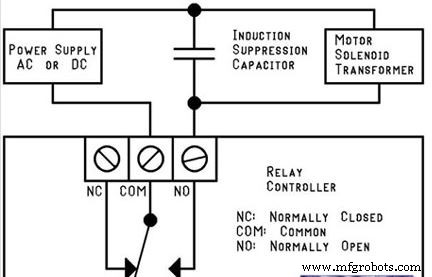 <図>
<図> 
ステップ4:レシーバーを構成するには
受信機は433MHzで動作し、Arduinoのプログラムは受信機の信号ポートをチェックするために継続的にループされます。正しい信号が受信されると、Arduinoはリレー1(R1)をアクティブにして、リレー2(R2)がモーターに電力を送るようにします。
データが送信機から送信されると、受信機は整数の形式でデータを受信します。私の場合、Arduinoのシリアルモニターを使用して、レシーバーが取得できる値を確認できました。
通信に高い無線周波数を使用する主な理由は、動作範囲が広く、信号をブロックする障害物がいくつかある場合でも、受信機が信号を受信することです。これは高周波電波によってのみ達成することができます。
私のプロジェクトでは、システムをアクティブ化するために約30フィートの作業半径を得ることができました。
注: アンテナに長いワイヤーをはんだ付けすることで、システムの機能半径を数フィート拡大できます。 受信機モジュールのポート。
<図> <図>
<図>  <図>
<図> 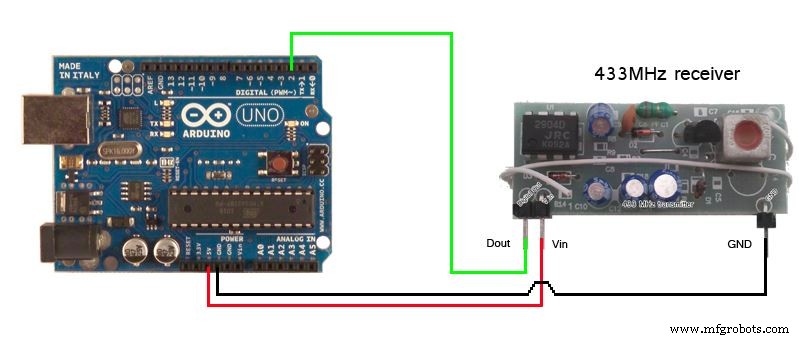
デモビデオ
最終的なプロジェクトのスナップショット <図>
 <図>
<図> 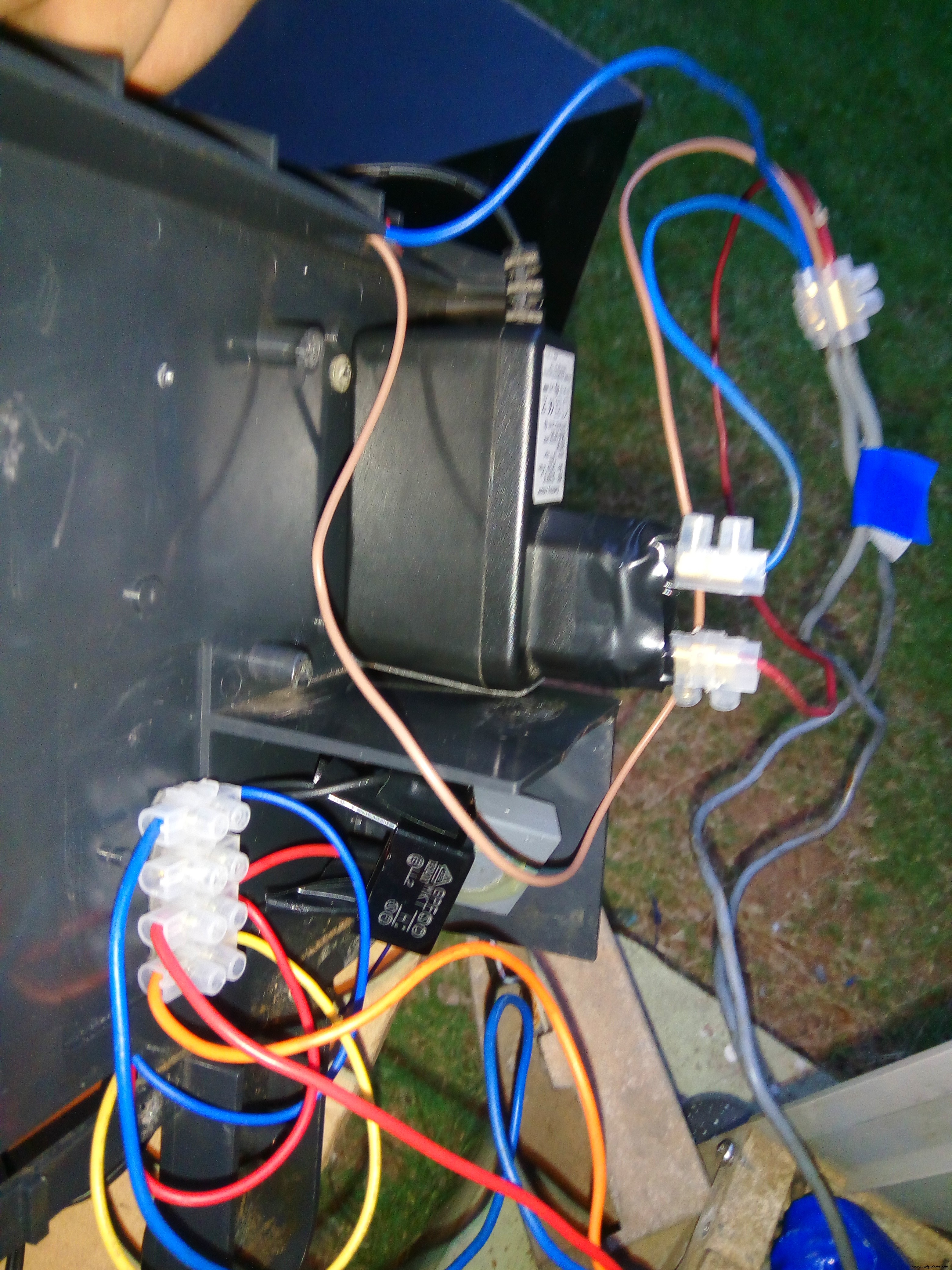 <図>
<図> 
回路図
製造プロセス