


Cartesian、6軸、およびスカラロボットの違い
デカルト、6軸、およびスカラロボット すべてがさまざまなタイプの産業用ロボットに属しています 。製造業は、生産に産業用ロボットを使用する方向に向かっており、3種類のロボットすべてが非常に関与しています。それぞれが独自の方法で設計されているため、他のタスクでは実行できない可能性のある特定のタスクを実行できます。
ロボットは一休みすることなく何時間もノンストップで作業できるため、生産時間が短縮されました。それらの速度と精度をミックスに加えると、製造工場での人的労力が不要になる未来を見ています。 出典:Pinterest
一見、これらのロボットは訓練を受けていない目には同じように見えるかもしれませんが、それよりも深くなります。ほとんどが同じ形をしているかもしれませんが、それらのデザインとそれらが扱う機能は完全に異なります。
3つのロボットを区別するものを分析する前に、そもそもそれぞれが何であるかを知ることが重要です。 出典:Pinterest
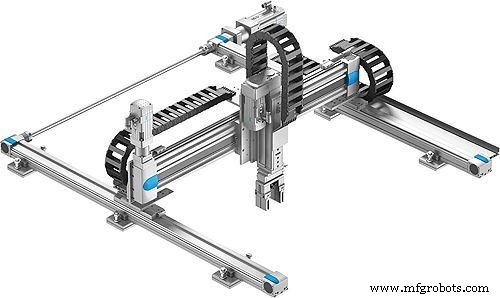
直交ロボット ガントリーロボットと呼ばれることもあります 、およびそれらはオーバーヘッドグリッドから機能し、リニアアクチュエータとモーターを使用してツールを配置するタイプです。長方形の作業用封筒があり、そのサイズはグリッドのサイズによって異なります。デカルトロボットには3次元の動きがあります。それらの剛性により、動作中は非常に正確になります。 マテリアルハンドリングロボットとして広く使用されています と機械塗装。 出典:Pinterest
6軸ロボット ロボットアームを可能にする台座に取り付けられるタイプです 他の2台のロボットよりも、すべての方向への動きが多く、最高の制御が可能です。名前が示すように、 6軸ロボット 6つの軸があり、その上に3次元的に移動して、好きなように配置できます。柔軟性が高いため、工場のロボットアームとして理想的です。 ロボットパレタイザーとしての溶接作業用 、および機械世話ロボットとして 。
スカラロボット 最高の産業用ロボットの1つです 。円形の作業エンベロープがあり、 4軸ロボットアームを使用して台座に取り付けられています。 3次元平面に沿って移動します。飛行機の端には、シータ軸と呼ばれるものがあり、柔軟性が高く、パレタイズロボット、機械のロードとアンロード、および小さな部品の組み立てロボットが優れています。 。
では、デカルト、6軸、およびスカラロボットは互いにどの程度正確に異なるのでしょうか。それらを互いに区別しやすくするために、次のパラメータを使用します。 出典:Pinterest
各ロボットの最大ペイロードは、ロボットのサイズとロボットが設計されたタスクによって異なります。原則として、ほとんどのロボットアーム 、ロボットの積載量は、ペイロードの総重量を超えている必要があります。これに基づいて、デカルトロボットは、他の2つと比較してより重いペイロードを処理するのに適しています。スカラロボットと6軸ロボットの場合、拡張されたロボットアームの負荷をサポートするため、制限があります。 。
デカルトロボットの場合、ピックアンドプレースの自動化 ベアリングとサポートフレームが全可動域を支えることができるので、重い負荷の移動は簡単です。ポイントをよりよく説明するために、110ポンドの負荷を想像してください。重量は、3台すべてのロボットのペイロード範囲内に十分収まっています。ただし、110ポンドはスカラの容量の上限です。したがって、結果として生じるトルクを処理するために、より多くの制御と追加の部品が必要になります。
しかし、デカルトロボットを使用すると、サポートシステムにより、追加のヘルプやコンポーネントを必要とせずに同じ負荷を簡単に処理できるため、産業用ロボットを選んで配置するのに理想的です。 。 出典:Pinterest
オリエンテーションは、ロボットを互いに差別化するもう1つの領域です。オリエンテーションに関しては、2つの主な点が際立っています。
ここでの目標は、ロボットのフットプリントを作業領域に合わせることにあります。たとえば、 6軸ロボットの場合 またはスカラロボット 作業中に大きな障害物を引き起こしているため、そのようなロボットを使用することはそのような状況では理想的ではありません。ただし、移動に必要な軸の数が最も少ない場合は、デカルトロボットを頭上に取り付けて、他のもののために十分なスペースを下に残すことができるため、より良い方法です。
同時に、問題のタスクが複雑な処理を伴う場合、またはより多くの軸を必要とする作業である場合は、a SCARA 最小のスペースを占めることができるが、それでも最大数の軸を使用できるロボットは、より良いオプションです。向きは、スペースと手元のタスクの性質に大きく依存します。 出典:Pinterest
高速ロボットアーム 産業用ロボットを差別化する際の主要な要因です 。高速を必要とするタスクと、優先するために精度を必要とするタスクがあります。ロボットの速度は、材料の取り扱いだけにとどまりません。また、提供されたスペースを移動する距離にも基づいています。
デカルトロボットは、小型で機敏であれば、約5m /秒、場合によってはそれ以上の速度で加速できます。スカラと6軸ロボットはそれに比べてはるかに遅いです。この点でデカルトロボットを優れたものにするもう1つの機能は、右の賭け、ボールねじアクチュエータ、またはリニアモーターと組み合わせると、より高速でより多くの距離をカバーするように変更できるという事実です。
デカルトロボットは、柔軟なオーバーヘッドレールに固定されています 、長距離まで延長できるため、産業用ロボットタイプに適しています。 。一方、スカラロボットと6軸ロボットは、めったに動かない台座に固定されています。
精度に関する限り、スカラロボットと6軸ロボットは、デカルト座標のロボットよりも少し正確です。デカルトロボットが同じレベルの精度を計測するには、その機能を強化する追加のコンポーネントとパーツを取り付ける必要があります。上記の部品には、ボールねじアクチュエータと精密機械加工されたボールレールテーブルが含まれます。
同時に、ロボットアームが原因で、スカラロボットや6軸ロボットが精度を維持できない場合があります。 偏向。このような場合、デカルトのロボットアーム たわみを最小限に抑え、エンドエフェクタをより正確に配置できる高精度のリニアベアリングを使用することをお勧めします。最終的に、これらの各ロボットの速度は、処理しているタスクによって異なります。 出典:Pinterest
作業環境と存在する危険は、これら3つのロボットを互いに区別するために使用できるもう1つの2つの要因です。スカラおよび 6軸ロボットの場合 、それらの台座はコンパクトであり、それはそれらが最小のスペースを占めることを可能にします。ただし、この固定された性質により、デカルトロボットの場合のように、ロボットのサポートフレームを頭上に設置できる環境では、それらが陳腐化する可能性があります。
ほこりや汚れも、人々が一緒に行くことを選択するロボットの種類に影響を与えます。スカラロボットと6軸ロボットは、より多くの動きを使用するデカルトロボットよりもほこりの影響を受けやすくなっています。ロボットは、ほこりや最初に可動部分の腐食を最小限に抑えるためにカバーすることができますが、これらは最終的に効率的な移動を妨げます。
6軸ロボットアームであるスカラを際立たせる違いを見てきました 、およびデカルトロボットでは、作成の背後にあるメーカーを知ることも重要です。以下は、トップの産業用ロボットアームメーカーの一部です。 世界で。 出典:Epson
エプソンは、35年以上の歴史を持つロボットメーカーです。最高級の 6軸ロボットで最もよく知られています 巨大なペイロードを処理する能力に加えて、最先端のロボット技術を備えています。彼らの6軸ロボットは、約10ポンドのペイロードとロボットアームを備えています。 450mmから1,480mmの範囲。すべてのロボットで使用されているEPSONRC +ソフトウェアには、機能を向上させるためのビジョンおよびフォースガイダンス機能があります。
EVSは、産業用ロボットの作成に関して世界をリードしています。 大手スカラロボットメーカーとして 、彼らの傑出した製品の中で、彼らのスカラモデルは業界で最も進んだものの1つです。彼らのカタログには、2つの高度なスカラロボットがあります。小さい方は5ポンドのペイロードと400mmのアームリーチ、もう1つは大きい方の8ポンドのペイロードと600mmのアームリーチです。
ほとんどのEVSロボットアームは世界中で高い需要があり、その高速性、高度な技術、独創的な設計により、自動車および航空宇宙産業で広く使用されています。 出典:yamaha- motor.com
ヤマハ発動機は、デカルトロボットの世界有数のメーカーです。多くの国際レースで使用されているスーパーバイクで最もよく知られているヤマハコーポレーションは、産業用ロボットの著名なメーカーおよびサプライヤーでもあります。 特にデカルト座標に焦点を当てています。彼らのカタログには、あらゆるタイプのデカルトロボットが掲載されています。同社はスカラロボットも製造しています と単軸のもの。
テクノロジーの車輪が回転し続けるにつれて、産業用ロボットのより洗練されたバージョン 毎年リリースされ続けます。新しいモデルごとに、以前のバージョンを悩ませていた弱点はますます小さくなっています。人間の生活のあらゆる側面が産業用ロボットに完全に依存するようになるのは時間の問題です。それが良いことなのか悪いことなのかはまだ決まっていません。 
デカルト、6軸、およびスカラロボットとは何ですか?

デカルトロボット
6軸ロボット

スカラロボット

デカルト、6軸、およびスカラロボットの違い

向き





EPSON

EVS


結論
産業用ロボット