


自律型ロボットとHMIの本当の違いは何ですか?
自律型ロボットとは、人間の監視を制限してタスクや行動を実行するロボットのことです。これは新しいテクノロジーですが、ロボットはすでに多くの状況でこのように機能しています。残念ながら、ロボットはすべて高度に構造化された大量生産オペレーションです。部品のバリエーションが多いメーカーや、構造化された環境では機能しないビジネスにとって、自律型ロボットはまさに自動化の次のステップです。
しかし、自律的な「優位性」を宣言するために急いで、多くの企業は、構造化されていない環境での限定的な監視の基本原則を放棄し、代わりにHMI –ヒューマンマシンインターフェイスを選択しました。これらは一般に、人間が定義された操作のパラメータを設定できるタッチスクリーンまたはシンプルなUIに依存するインターフェースであり、ロボットが限られた状況で適応できるようにします。 (つまり、パーツはすべて同じ形状です)追加のプログラミングは必要ありません。
この重要な違いを念頭に置いて、自律型ロボットとは何か、カスタム統合に基づいて構築された単なるHMIベースのソリューションとは何かを理解することが重要です。考慮事項のいくつかは次のとおりです。
- 自律型ロボットはさまざまな非構造化環境で機能しますが、HMIは明示的なコマンドを使用して定義されたワークフローに依存します
- 自律型ロボットを使用すると、社内のエンジニアは時間の経過とともにシステムを進化させることができますが、HMIはすべてのソリューションプロバイダーのみが1回限りの統合を実現します
- 自律型ロボットは、人間の監視が予測できる以上の価値を提供できますが、HMIは明示的にオペレーター主導で制御されます
自律型ロボットはさまざまな非構造化環境で機能します
自律型ロボットは、パラメータとプロセスモデルに基づいて機能できるため、主に便利です。彼らがとるすべての行動に特定のプログラミングを要求するのではなく。彼らは、制約や基本的なモデリングを尊重しながら、また統合された関連システムから情報を取り入れながら、環境に移動して対応することができます。
たとえば、工場のフロアにあるプログラム可能なアクセスコントローラは、コンベヤに吊るされた部品の位置を示し、自律型ロボットの前に配置されたときにコンベヤに開始と停止を指示することさえできる場合があります。ロボットが動作する製品を認識する手段に応じて、そのロボットはプロセス(塗装、組み立て、溶接、その他の重要な付加価値)を実行し、その後、さまざまな部品に適応することができます。
この状況では、ロボットは他の産業用制御システムと完全に統合されており、各部品の詳細ではなく、幅広い一般的な指示で操作できると同時に、協調的かつインテリジェントな方法で動作することができます。
HMIは個々のワークフローに固有に構築されています
HMIは、ロボットインターフェースと同じくらい単純ですが、それ自体のための単純さは必ずしも良いことではありません。たとえば、HMIが単純すぎる場合、特定のプロセス最適化オプションを見逃したり、さらに悪いことに、特定の部分とワークフローのみを尊重したりすることができますが、そのような機能はすべてのコンテキストやタイプに役立つとは限りません。メーカーの。
たとえば、さまざまな大きな窓やドアを組み立てたり塗装したりするためにHMIをインストールしている場合があります。最終的に、HMIは、範囲内の特定の部分の窓でスコープを設定できます。たとえば、高さ10フィートまでのドア、長さ6フィートまでの窓枠などです。部品がこれらの仕様を超えたり混乱させたりしない限り、HMIは費用効果の高いソリューションになる可能性があります(ただし、統合には費用がかかる可能性があります)。ただし、11フィートのドアまたは7フィートの窓枠が来ると、すべての地獄が崩壊する可能性があります。

自律型ロボットはエンジニアに新しいプロセスモデルと機能を提供できます
最終的に、自律型ロボットが機能する能力は、そのプロセスモデルの耐久性と、周辺センサーやハードウェアと統合する能力に依存します。これが可能な場合、統合開発環境により、自律型ロボットは、エンジニアの仕様に従って新しいアプリケーションを学習できるようになります。アプリケーションごとに元のプロバイダーによって完全に再設計する必要はありません。
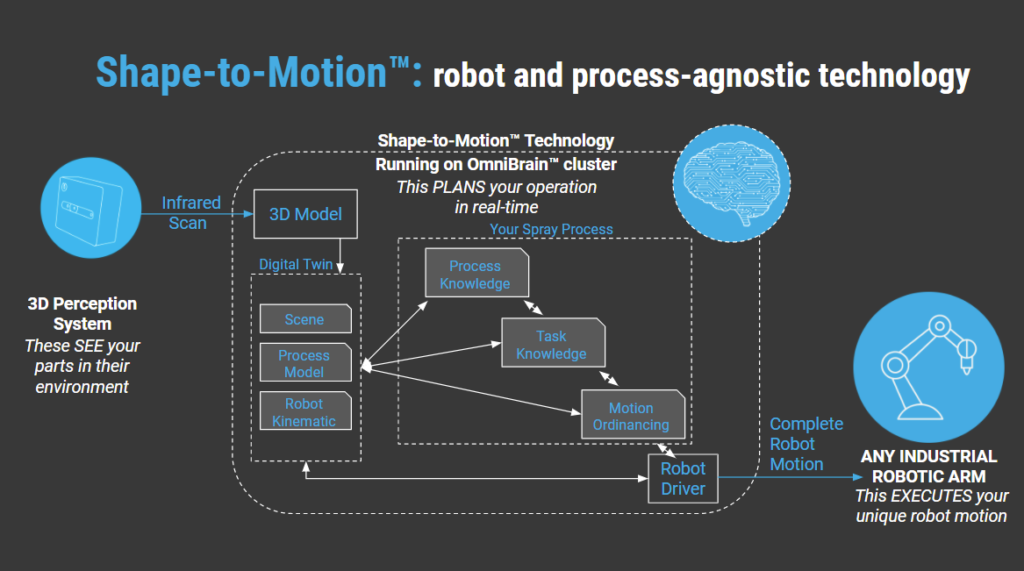
たとえば、OmniroboticのShape-to-Motion™自律ロボティクステクノロジーは、ロボットとプロセスの両方に依存しないように構築されています。つまり、必要なハードウェアやレイアウトは、いつの日か、個々の施設に合わせてカスタマイズされたものと同じモーションプランニングロジックで対応できます。 HMIを使用すると、統合ごとに独自のモーションプランニングとプロセス戦略が必要になる可能性があるという点で、ここでの制限は明白です。これは、現在、インテグレーターが高混合環境でロボットを展開することを制限している同じ従来のプログラミングモデルに基づいています。
HMIは元のプロバイダーによってのみ構築されます
HMIは、事実上、非常に特定の部品やアプリケーションのワンストップショップです。それらは、完全に置き換えられることなく、適応または改善されることはめったにありません。最終的には製造がこれまでになく速く進んでいるため、必ずしも適切な投資とは限りません。つまり、顧客の厳しい要求を満たすために、部品の処理方法を変更せざるを得なくなる可能性があります。適応に失敗する時間が長ければ長いほど、他の誰かが適応する可能性が高くなります。
そのため、ほとんどのHMIは、元のインテグレータによってのみ構築および変更できます。通常、これらのシステムを新しいレイアウトに適合させようとすると、ほとんど完全に役に立たなくなります。柔軟な製造が日常の成功に不可欠である世界では、HMIが測定することは本当に可能ですか?

自律型ロボットは、人間の監視が検証できる以上の付加価値を提供します
自律製造ロボットの中核は自律運動生成です。これは、特定のプロセスでは、ロボットの実際の命令が何であれ、どのアプリケーションでもより高い精度を達成できることを意味します。
なぜそうなのですか?たとえば、曲線について考えてみましょう。従来のプログラミングツールでは、プログラマーがさまざまなポイントを設定して半径を明確にすることができますが、ほとんどの場合、処理されるサーフェスと比較して常に固定角度に設定されるとは限らないポイントツーポイントプログラミングが必要です。自律型ロボットの場合、機械は曲面の3D再構成を分解し、非常に正確なロボットの動きを数秒で処理できます。
事実は変わりません。HMIを使用すると、高品質のプログラムを取得できない可能性があります。それで問題ありません。人間はロボットをプログラムするためにこの地球に置かれませんでした–少なくとも、製造業者が従来の展開で苦労している品質問題、やり直し、および拒絶につながることが非常に多い平凡な詳細レベルまでは。
HMIは操作のみを自動化しますが、すべての付加価値はオペレーター主導である必要があります
HMIは命令を要求し、毎回特定の順次命令に基づいて動作します。例外はあるかもしれませんが、HMIは明らかに「自律的に」機能せず、多くの「自律プロバイダー」がこれを提供すると主張するかもしれませんが、彼らが頻繁に行っているのは、ワークフローとエンジニアリングの手段を実際に制限する洗練されたHMIを提供することです。メーカーは、プロセスの目標を達成するために使用できます。
あなたはスループットを重視するメーカーですか?どのプロセスを使用しても、高品質の出力を期待しますか?施設を完全に資本増強することなく、市場の変化に適応したいですか?これらすべての状況で、HMIが答えになる可能性がありますが、自律型ロボットは間違いなく1つです。
Omniroboticは、スプレープロセス用の自律型ロボット技術を提供し、産業用ロボットが部品を確認し、独自のモーションプログラムを計画し、重要な産業用コーティングおよび仕上げプロセスを実行できるようにします。 ここで、どのような見返りが得られるかを確認してください 、またはどのように利益を得ることができるかについて詳しく知る 自律型製造システム 。
産業用ロボット