


車のアクセスの自動アドレス指定スキームの比較
Bluetooth Low Energyを使用するカーアクセスシステムには、通常、中央モジュールと複数の衛星モジュール/ノードがあり、コントローラーエリアネットワーク(CAN)バスまたはローカル相互接続ネットワーク(LIN)バスのいずれかを介して通信します。衛星モジュールは、Bluetooth通信範囲を改善するために、車の周囲に物理的に分散されています。
システム設計者は、同じソフトウェアを使用して1つのPCBを設計し、車内への設置がBluetoothノードの位置に依存しないようにすることで、衛星モジュールの製造可能性を向上させたいと考えています。ただし、設置時の各衛星ノードのハードウェアとソフトウェアは同一であるため、モジュールが車両に設置された後、中央モジュールが各衛星ノードに一意のCANまたはLINアドレスを割り当てることができるようにするスキームが必要です。
>1つのオプションは、専用のLINデイジーチェーンネットワークを使用して、製造中にモジュールとCANIDを共有することです。このシナリオでは、中央モジュールはLINインターフェースを使用して各衛星モジュールをアドレス指定しますが、LINインターフェースは車両の寿命の間再び使用されることはありません。別のオプションでは、専用のLINバスを、部品表(BOM)のコストを削減する個別の実装に置き換えます。システムコストをさらに削減するために、Bluetoothのみを使用し、追加のハードウェアを使用しない真のワイヤレスオプションは、ノードですでに利用可能なBluetoothインフラストラクチャを再利用してモジュールをアドレス指定します。
最終的に、ワイヤレス方式は、BOM、システム配線、および現在不要になったコンポーネントの保管、管理、および組み立てのコストを削減します。この記事では、ワイヤレス方式について詳しく説明する前に、有線自動アドレス指定方式の概要を説明します。
自動車のカーアクセスシステムは、キーとしての電話やその他のデジタルキー機能にBluetooth LowEnergyを使用する傾向にあります。これらのシステムは、パッシブエントリーパッシブスタートシステムと同様に動作しますが、ドライバーのスマートフォンをキーとして使用する機能が追加されているため、従来のキーフォブに取って代わります。 Phone-as-a-key互換車両は、中央モジュールまたはスマートキーモジュールと複数の衛星モジュールを実装し、それぞれがスマートフォンまたはキーフォブからBluetooth信号を受信できます。一般的なシステムには、中央モジュールに加えて、6〜12個の衛星モジュールが含まれる場合があります(図1)。
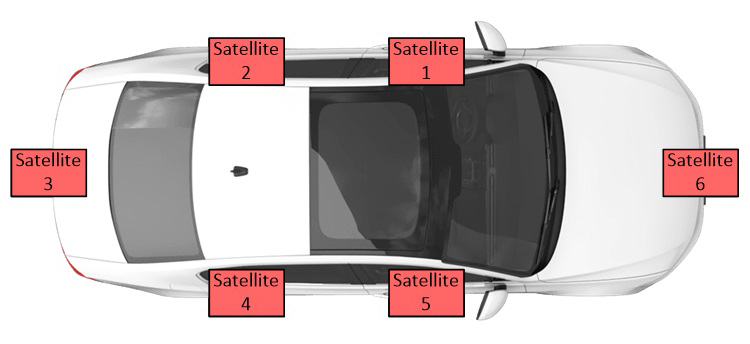
図1.この図は、Bluetooth衛星モジュールを車全体に分散できる場所を示しています。
消費者は、電話またはキーフォブが車両のロック解除ゾーン内にあるかどうかを判断できるように、キーとしての電話システムを必要としています。スマートフォンやキーフォブの位置を概算するために、システムはさまざまな衛星モジュールによって受信された信号を三角測量します。これらのモジュールは、助手席側のドア、ロッカーパネル、トランク、バンパーなどの場所で車全体に配信されます。
車両の中央モジュールは、CANバスやLINバスなどの通信インターフェースを使用して衛星モジュールと通信します。中央モジュールは、各衛星モジュールから受信したデータを使用して、スマートフォンまたはキーフォブの位置を三角測量し、車への進入アクセスを許可するかどうかを決定します。図2は、CANバスを中央モジュールと衛星モジュール間の主要な通信ネットワークとして使用する方法を示しています。
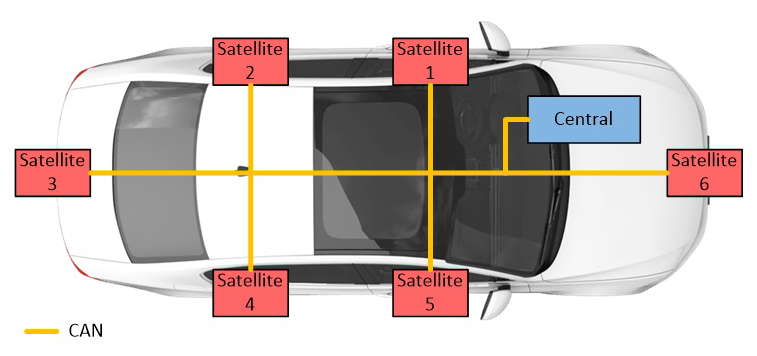
図2.CANバスは、Bluetoothカーアクセスシステムネットワークの中央モジュールと衛星モジュール間の主要な通信ネットワークと見なすことができます。
サテライトモジュールのCANバスアドレスにより、中央モジュールはデータを受信しているサテライトモジュールを判別できます。中央モジュールは、固有のCAN IDまたはアドレスを、システム全体の設計によって決定される特定の各衛星モジュールの場所に関連付けます。バスアドレスが配線またはハードコーディングされた、衛星モジュールごとに一意のPCBを使用するのではなく、すべての衛星モジュールに対して単一バージョンのファームウェアを実行する単一のPCB設計を使用する方が有利です。これにより、6台、8台、またはそれ以上のほぼ同一のユニットの製造と在庫管理に伴う追加のコストとロジスティクスの問題を回避できます。単一の設計により、同じ衛星モジュールを車両のどこにでも設置できるようになるため、製造も簡素化されます。
衛星ノードのハードウェアとソフトウェアはすべて同一であり、インストール時にアドレス指定されていないため、自動車にインストールした後、中央モジュールが各衛星モジュールに一意のCANIDまたはアドレスを割り当てることができるスキームが必要です。
>有線自動アドレス指定:LINデイジーチェーン方式
現在、自動車の衛星モジュールへのCANバスアドレスの割り当ては、衛星がバス上でデイジーチェーン接続された別個の通信ネットワーク(LINなど)を使用して実現されています(図3)。中央モジュールは、CANバスネットワークアドレスをLINバスを介して最初の衛星ノードに送信します。完了すると、最初の衛星ノードは、中央モジュールから受信した次のアドレスをLINバスを使用して2番目の衛星に送信します。このプロセスは、すべての衛星が固有のCANアドレスを受信するまで続きます。
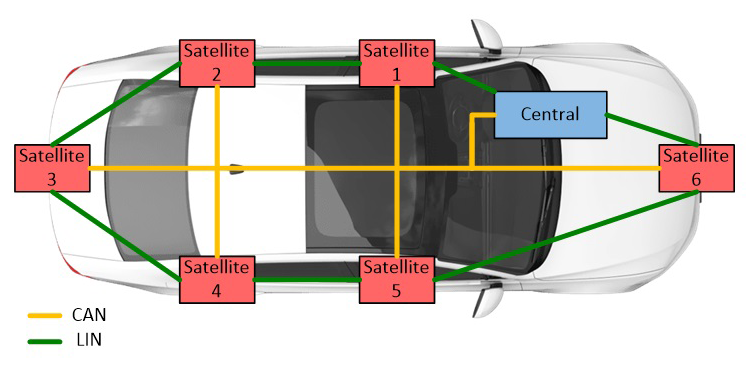
図3.この自動アドレス指定アーキテクチャは、LINデイジーチェーンを使用して一意のCANIDを衛星に送信します。
このスキームでは、モジュールごとに2つのLIN物理層(PHY)が必要です。1つはデータの受信用で、もう1つはデータの送信用です。 LIN PHYは、自動アドレス指定操作中にのみ使用されます。衛星がプログラムされると、すべての標準データ通信はカーアクセスCANバスを介して行われます。一般的な自動車には6〜12個の衛星モジュールが搭載されている場合があります。つまり、1回限りの自動アドレス指定操作をサポートするには14〜26個のLIN PHYが必要であり、車両のPCB BOM、システムコスト、および複雑さが大幅に増加します。
有線自動アドレス指定:単線方式
Texas Instrumentsは、専用の自動アドレス指定LIN PHYをMOSFETといくつかの抵抗に置き換えることにより、各モジュールのBOMコストを削減するための代替方法を開発しました。このスキームの自動アドレス指定ソフトウェアの主な違いは、すべてのサテライトモジュールがBluetoothシステムオブチップ(SoC)用にプログラムされており、P_INラインでウェイク信号が受信されるまでCANバスを無視することです。図4にブロック図を示します。
クリックすると拡大画像が表示されます
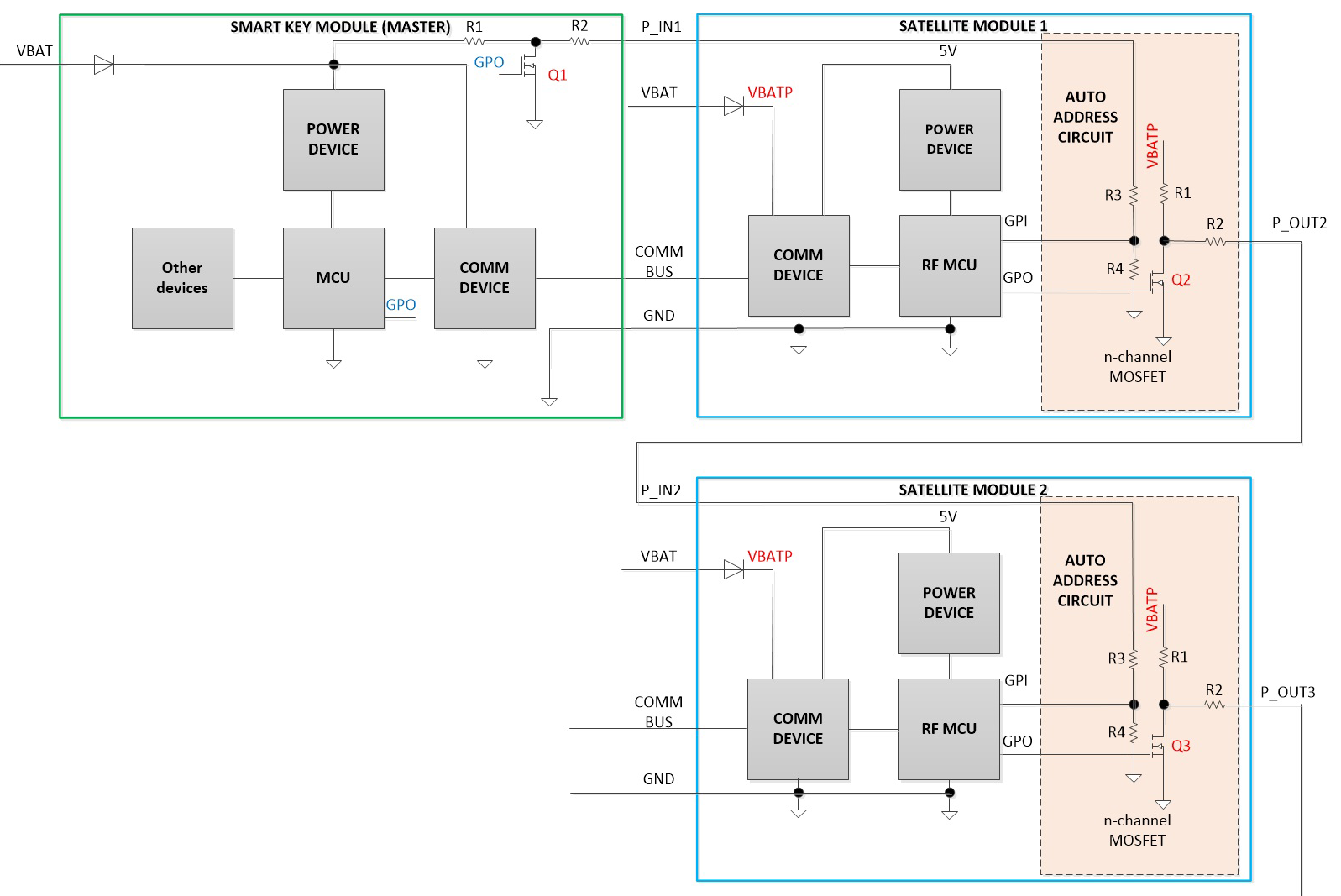 図4.単線自動アドレス指定方式は、LINPHYをMOSFETといくつかの抵抗に置き換えます。
図4.単線自動アドレス指定方式は、LINPHYをMOSFETといくつかの抵抗に置き換えます。
中央モジュールは、電界効果トランジスタQ1を使用してP_IN1ラインにパルス幅変調(PWM)信号を送信することにより、自動アドレス指定プロセスを開始します。分圧器を介して、最初の衛星モジュールはバッテリレベルのウェイク信号P_IN1を受信し、BluetoothMCUにCANバスを「リッスン」するように信号を送ります。並行して、中央モジュールは、CANバス上で最初の衛星モジュールCANIDの送信を継続的に開始します。最初の衛星モジュールがCANIDメッセージを受信すると、中央モジュールに確認メッセージを送信して、アドレスの適切な受信を確認します。確認メッセージを送信した後、最初の衛星モジュールはPWMウェイク信号を2番目の衛星モジュールに送信し、CANバスのリッスンを開始して新しいCANIDを受信するようにそのモジュールに信号を送ります。中央モジュールが最初のサテライトモジュールから確認応答メッセージを受信した後、CANバスは2番目のサテライトモジュールから確認応答メッセージを受信するまで、2番目のサテライトモジュールのCANIDメッセージを常に送信します。
要約すると、各衛星モジュールは1つずつウェイクアップし、CANバスからCANIDを受信します。中央モジュールは、アドレス指定された衛星モジュールから確認メッセージを受信した後、すべてのモジュールがアドレス指定されるまで、送信される次のCANIDをインクリメントします*。
これは改善されていますが、この実装では、図5に示すように、中央モジュールと各衛星モジュールの間に配線が必要です。
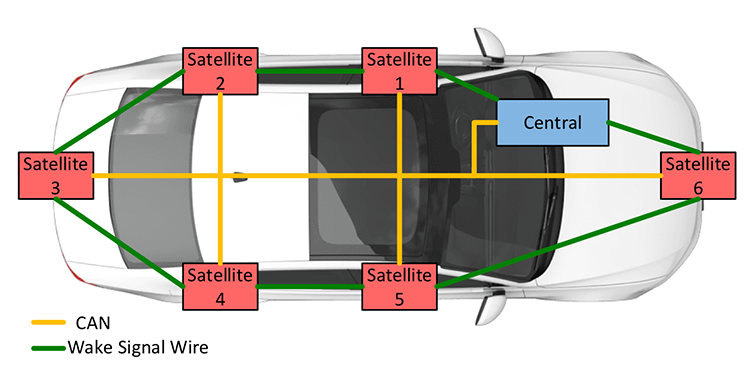
図5.単線自動アドレス指定アーキテクチャでは、中央モジュールと衛星モジュールの間に配線が必要です。
ワイヤレス自動アドレス指定/ケーブル交換
Texas Instrumentsは、Bluetoothローカリゼーション技術を使用する自動アドレス指定方法も開発しました。これらの技術により、製造中およびモジュールの交換後に、Bluetooth衛星モジュールに中央モジュールからCANアドレスを割り当てることができます。モジュールアドレス指定プロセスは、中央モジュールに最も近いと判断されたモジュールから始まり、最も遠いモジュールがアドレス指定されるまで、最も遠い距離に近い順に続きます。モジュールの配置、測定技術、およびモジュールの周囲が測定距離を決定するため、実際の場所は必要ありません。距離dnは、測定された距離(Bluetooth受信信号強度表示[RSSI]から)を表します。理想的には次のとおりです。
d1
たとえば、図6は、ブロック図と、各モジュールと中央モジュールの間の距離を示しています。
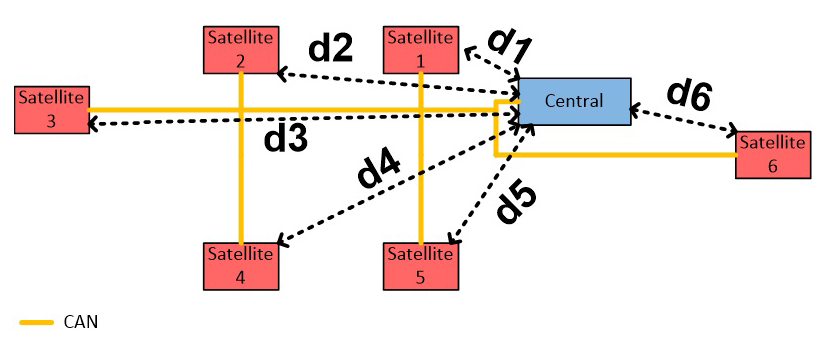
図6.この図は、中央モジュールからのワイヤレス自動アドレス指定方式の各モジュール間の距離を示しています。
実際には、実際の距離は、特定の衛星と中央モジュールの間の空間の無線周波数(RF)伝搬特性により、測定された距離とは異なる場合があります。ただし、各衛星モジュールからの測定距離が繰り返し一貫しており、複数のモジュールからの測定距離に重複がない限り、中央モジュールは、測定距離が常に最短から最遠まで同じ順序で。したがって、中央モジュールは、以前のテストから、最初のモジュールが常に運転席側のドア(CANアドレス1)であり、2番目のモジュールが常にフロントバンパー(CANアドレス2)であるということを認識します。
自動アドレス指定スキームが確実に機能するようにするには、慎重なテストを使用して各車両モデルの特性を理解し、潜在的な問題を特定して解決できるようにする必要があります。たとえば、2つ以上のアドレス指定されていない衛星モジュール間の中央モジュールの距離測定値が類似または等しい場合、図7に示すように、以前にアドレス指定された衛星モジュールを使用して、中央で区別できなかったアドレス指定されていないモジュールをローカライズできます。複数の衛星モジュールを使用して行うこともできます。
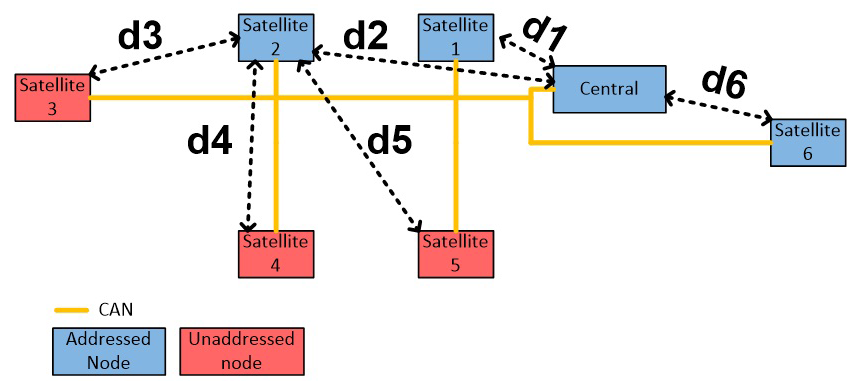
図7.以前にアドレス指定された衛星モジュールを使用して、マスターが区別できなかったアドレス指定されていないモジュールをローカライズできます。
中央モジュールが衛星1、2、および6をローカライズできるが、3、4、および5はローカライズできない場合、衛星モジュール2を使用して、衛星モジュール3、4、および5の距離を測定します。距離測定は一貫しており、モジュール間の距離測定に重複はありません。衛星モジュールは適切にアドレス指定でき、常に同じ順序でアドレス指定されます。
実装
Bluetooth Low EnergyプロトコルのGenericAccess Profile(GAP)レイヤーとの一貫性を保つために、中央モジュールを「スキャナー」と呼び、衛星モジュールを「アドバタイザー」と呼びます。 GAP層は、デバイスの検出、リンクの確立、リンクの終了、セキュリティ機能の開始、デバイスの構成など、デバイスのアクセスモードと手順を処理します。自動アドレス指定に関連するデバイスの2つの状態は次のとおりです。
- アドバタイザー:デバイスは特定のデータでアドバタイズし、開始デバイスに接続可能なデバイスであることを知らせます(注:このアドバタイズメントにはデバイスアドレスが含まれ、デバイス名などの追加データが含まれる場合があります)。
- スキャナー:広告を受信すると、スキャンデバイスはスキャン要求を広告主に送信します。
広告主はスキャン応答で応答します。このプロセスはデバイス検出と呼ばれます。スキャンデバイスはアドバタイズデバイスを認識しており、アドバタイズデバイスとの接続を開始できます。図8は、以下の広告主とスキャナーのフローを示しています。
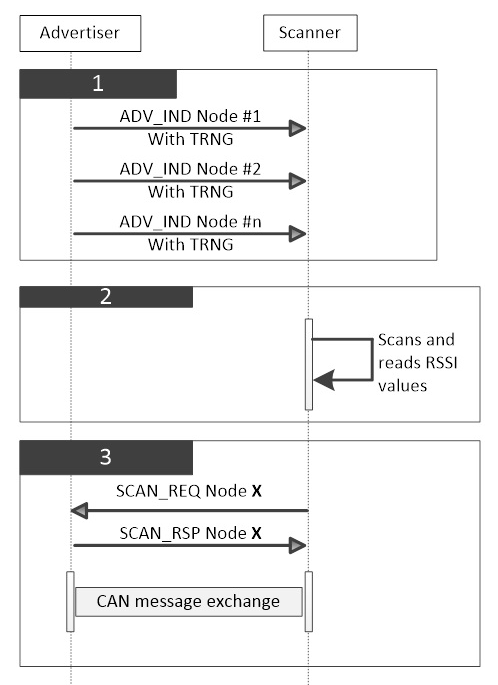
図8.このBluetoothLow Energyソフトウェアの図は、広告主とスキャナーのフローを示しています。
図8を見ると、すべての広告主は特定のデータを使用して広告を掲載し、広告データの一部として使用される真の乱数を生成します。これにより、ノードの重複がなくなります。
スキャナーは複数回スキャンし、各広告主からRSSI値を読み取ります。次に、RSSI値を平均して、それに最も近い広告主を決定します。
スキャナーはSCANリクエストを最も近い広告主に送信します。次に、自動アドレスCANメッセージを送信し、広告主のCANメッセージの確認応答を待ちます。
広告主はSCAN_REQを使用してCAN自動アドレス指定を有効にします。広告主は自動アドレスCANメッセージを受信すると、CAN確認メッセージを送信し、広告を停止します。
これらの手順は、すべての広告主が自動アドレス指定されるまで繰り返されます。
結果
テストは、カーアクセスBluetooth Low Energy + CAN衛星モジュールのリファレンスデザインと12フィートのハーネスを使用して行われました。各コネクタ間の間隔は約6フィートでした(図9)。
クリックすると拡大画像が表示されます
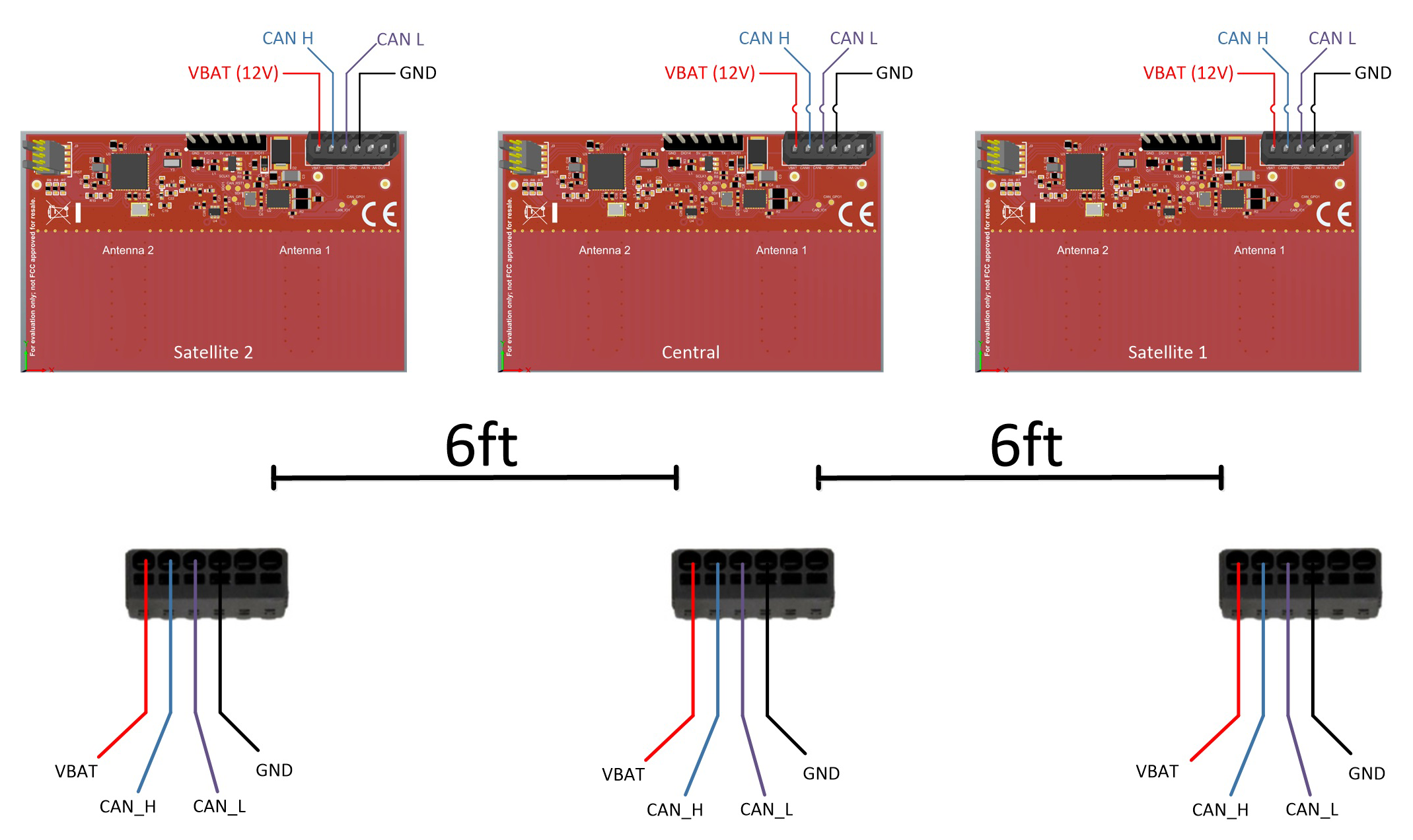
図9.テスト用のハードウェアセットアップにはTIDA-020032リファレンスデザインが含まれています。
そして、ボードは図10に示すように配置されました(d1〜4フィートおよびd2〜8フィート):
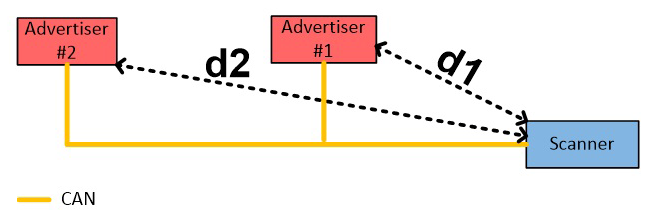
図10.この図は、テスト用のハードウェアの配置を示しています。
スキャナーのBluetoothLow Energyパラメーターは、1秒のスキャン期間と250ミリ秒のスキャンウィンドウと間隔でした。広告主のBluetoothLow Energyパラメータは、100ミリ秒の間隔でアドバタイズされました。各測定期間中に、スキャナーはノードごとに10個のRSSIサンプルを取得し、各測定セットを平均して、各広告主の測定距離値を生成しました。
3つの自動アドレス指定スキームの比較
前のテストの結果は表1にまとめられており、この記事で説明した3つの自動アドレス指定手法のそれぞれの相対的な遅延、信頼性、および実装コストを比較しています。
表1.自動アドレス指定手法の比較
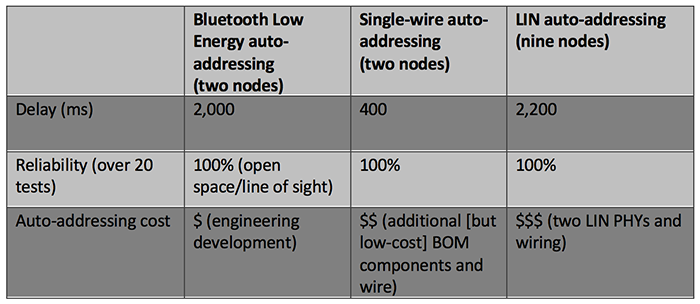
表1は、ワイヤレスBluetooth Low Energyアドレス指定テストの結果を、前述の2つの有線自動アドレス指定手法と比較しています。これらの結果から、無線技術は有線技術の約5倍の時間がかかるように見えます。 Bluetooth Low Energyネットワークのパラメータをさらに改良することで、より優れた、より高速な応答を実現できます。改善の余地があります。実際の距離は、車両内の各ノードの特定の場所に関連付けられたRF伝搬特性(つまり、見通し外の課題)により、測定された距離とは異なる可能性があるため、これにはさらにテストが必要になります。
ワイヤレス自動アドレス指定は、材料の観点から最もコストが最適化されたソリューションであり、追加のハードウェアやモジュール間の追加の配線は必要ありません。ただし、これらの利点を享受するには、システム設計者は、ソフトウェアを最適化し、不正確さを考慮してRFパフォーマンスを提供するためのテストを実行する必要があります。有線アプローチを好む場合、TIの有線自動アドレス指定方法では、各モジュール間に接続されたワイヤとともに、BOMにいくつかの小型で低コストのコンポーネントを追加する必要があります。これらを組み合わせることで、Bluetoothカーアクセスシステムの自動アドレス指定機能を実装する方法を選択する際の一連のオプションが提供されます。
*単線自動アドレス指定方法の詳細とテスト結果については、TexasInstrumentsのカーアクセスBluetoothLow Energy + CAN衛星モジュールリファレンスデザインガイドを参照してください。
参照
- Bluetoothコアの仕様
- 接続の標準は、安全性、BluetoothSIGの新しい標準を設定します
>>この記事はもともと姉妹サイトのEDN。
埋め込み