


静電容量式加速度計の概要:静電容量式センシングによる加速度の測定
この記事では、静電容量センシングを使用して加速度を測定する方法について説明します。
加速度計は、さまざまなアプリケーション分野で使用されています。たとえば、自動車のアプリケーションでは、加速度計を使用してエアバッグシステムを作動させます。カメラは、画像のアクティブな安定化のために加速度計を使用します。コンピュータのハードドライブは、デバイスの読み取り/書き込みヘッドに損傷を与える可能性のある外部衝撃を検出するために、加速度計にも依存しています。この場合、外部ショックが発生すると、加速度計は駆動動作を一時停止します。これらはほんの数例の加速度計アプリケーションです。
これらのデバイスを何に使用できるかについては、実際には無限の可能性があります。微細加工技術の大きな進歩により、今日の小型で低コストの微細加工された加速度計が可能になりました。実際、小型で低コストであることが、これらのデバイスをこのような幅広いアプリケーションに適用できるようにする主な要因の2つです。
この記事では、加速度を測定する物理学を見ていきます。マススプリングダンパー(別名マスダンパースプリング)構造が加速度を変位量に変換する方法と、静電容量センシングアプローチを適用してこの変位をに比例する電気信号に変換する方法を説明します。適用された加速。
マススプリングダンパーを使用した加速度の測定
図1に示すようなマススプリングダンパー構造を使用して、加速度を測定できます。
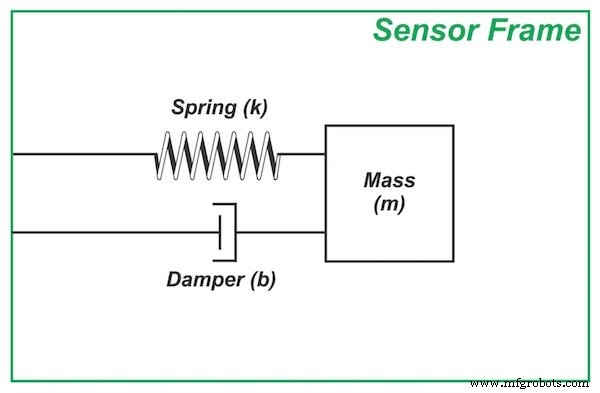
図1。 マススプリングダンパー構造
一般にプルーフマス(またはテストマス)と呼ばれる既知の量の質量が、バネを介してセンサーフレームに接続されています。
ダンパーはこのシステムの重要なコンポーネントですが、EEにとっては少し不思議であり、ダンパーの基本概念を紹介するためにいくつかの段落が必要になる可能性があるため、このシリーズの次の記事まで棚上げします。
図1に示す構造がどのように加速度を検出できるかを見てみましょう。
外力によりセンサーフレームが加速すると、慣性によりプルーフマスが「後退」する傾向があります。これにより、以下に示すように、センサーフレームに対するプルーフマスの相対位置が変更されます。
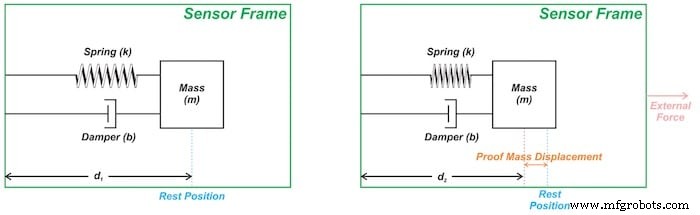
図2。 (a)外力がない場合、プルーフマスは静止位置にあります。 (b)フレームが右に加速すると、センサーフレームの観察者は、プルーフマスが静止位置の左側に移動していることを観察します。
図2(a)は、外力がない場合の静止位置でのプルーフマスを示しています。図2(b)に示すように、フレームに外力を加えると、フレームは右に加速します。プルーフマスは最初は静止している傾向があり、フレームに対するプルーフマスの相対位置が変化します(d 2
センサーの非慣性(つまり、加速)フレームの観察者は、プルーフマスが静止位置の左側に変位していることを観察します。ばねはプルーフマスの変位により圧縮され、プルーフマスの変位に比例した力を及ぼします。ばねによって加えられる力により、プルーフマスが右に押され、外力の方向に加速されます。
システムのさまざまなパラメータに適切な値が選択されている場合、プルーフマス変位はフレーム加速度の値に比例します(システムの過渡応答が消滅した後)。
要約すると、マススプリングダンパー構造は、センサーフレームの加速度をプルーフマス変位に変換します。残りの問題は、この変位をどのように測定できるかということです。
プルーフ質量変位の測定:静電容量センシングアプローチ
プルーフマス変位は、いくつかの方法で測定できます。一般的な方法の1つは、図3に示す静電容量センシングアプローチです。
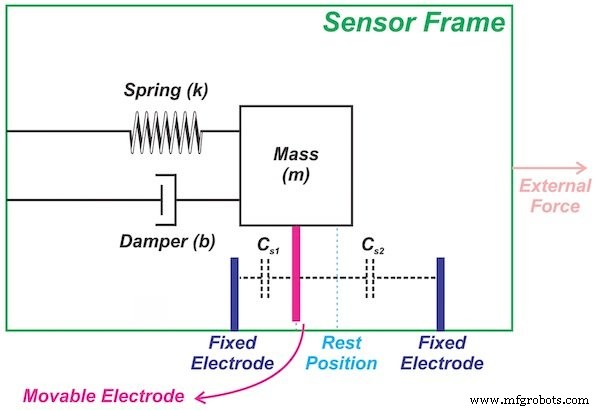
図3
プルーフマスに接続された可動電極とともに、センサーフレームに固定された2つの電極があります。これにより、2つのコンデンサC s1 が作成されます。 およびC s2 、図3に示すように。
プルーフマスが一方向に移動すると、可動電極と固定電極の一方の間の静電容量が増加し、もう一方のコンデンサの静電容量は減少します。これが、入力加速度に比例するプルーフ質量変位を検出するために、センスコンデンサの変化を測定するだけでよい理由です。
同期復調を使用した加速度計の信号調整
センスコンデンサの変化を正確に測定するために、同期復調技術を適用できます。図4は、アナログ・デバイセズのADXLファミリの加速度計で採用されている信号調整の簡略版を示しています。
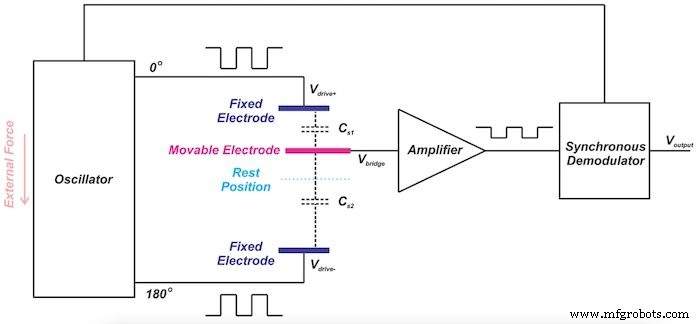
図4。 アナログ・デバイセズの画像(適合)提供
この場合、1MHzの方形波がセンスコンデンサC s1 のAC励起として使用されます。 およびC s2 。固定電極に適用される方形波の振幅は同じですが、互いに180°位相がずれています。可動電極が静止位置にあるとき、増幅器入力の電圧はゼロボルトです。
可動電極が固定電極の1つに近づくと、その電極からの励起電圧の大部分が増幅器の入力V ブリッジに現れます。 、これは、増幅器の入力に現れる方形波が、より近い電極の励起電圧と同相であることを意味します。
たとえば、図4では、増幅された出力はV drive + と同相の方形波です。 C s1 C s2 よりも大きい 。
V ブリッジの振幅 証明質量変位の関数です。ただし、V ブリッジの位相関係も知る必要があります。 V drive + に関して およびV ドライブ- プルーフマスがどの方向に変位するかを決定します。
同期復調器は基本的に、増幅器の出力に励起電圧(V drive + のいずれか)を乗算します。 またはV ドライブ- )アンプ出力の方形波をDC電圧に変換し、変位量とその方向を明らかにします。
同期復調がこれをどのように実現するかについては、LVDT復調技術に関する私の記事を参照してください。LVDT復調:整流器タイプと同期復調。
シングルセンシングコンデンサを使用しないのはなぜですか?
図3に示されている静電容量式センシングには、異なる性質があります。C s1 の場合 増加、C s2 減少し、その逆も同様です。
固定電極の1つが省略されているため、可変コンデンサが1つしかないシングルエンド静電容量センシングを使用することもできます。この場合、図5に示すようにシステムをモデル化できます。
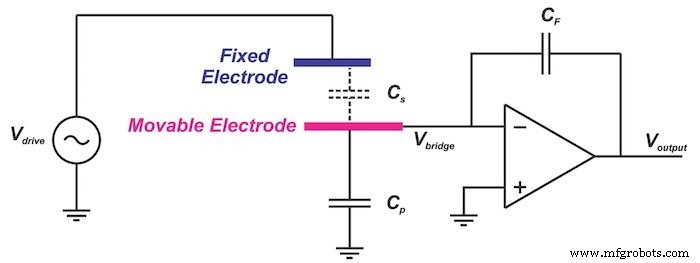
図5
このシングルエンドバージョンは、より単純なソリューションのようです。では、なぜ単一の検出コンデンサを使用しないのですか?
シングルセンシングコンデンサ構造:非線形出力
この回路をもっと詳しく調べてみましょう。
上の図では、C p 可動電極からアースまでの総寄生容量をモデル化します。理想的には、V ブリッジ は仮想グラウンドにあり、C p は無視できます 片側にアースがあり、反対側に仮想アースがあるからです。
したがって、出力は次のように簡単に取得できます。
\ [V_ {output} =-\ frac {C_s} {C_F} V_ {drive} \]
式1
バイアス電流経路は図5には示されていないことに注意してください。コンデンサの基本式を使用して、出力をプルーフマス変位で表すことができます。
コンデンサCの場合、次のようになります。
\ [C =\ epsilon \ frac {A} {d} \]
式2
ここで、εは誘電率、Aは平行板の面積、dは2枚の導電性板の間の距離です。簡単にするために、2つのコンデンサC s およびC F 同じεとAを持っています。
式1は、次のように簡略化できます。
\ [V_ {output} =-\ frac {d_F} {d_s} V_ {drive} \]
ここで、d F およびd s C F の電極間の距離を示します およびC s 、 それぞれ。 d s 初期距離d 0 の合計として表すことができます 変位値Δd。
そこから次のものを取得できます:
\ [V_ {output} =-\ frac {d_F} {d_0 + \ Delta d} V_ {drive} \]
ご覧のとおり、変位項(Δd)は出力方程式の分母にあります。したがって、出力はプルーフ質量変位Δdの非線形関数です。
微分構造:線形出力
図4に示されている差動静電容量センシングの伝達関数を調べてみましょう。
差動静電容量センシングを使用すると、V bridge によって与えられます:
\ [V_ {bridge} =\ frac {C_ {s1} V_ {drive +} + C_ {s2} V_ {drive-}} {C_ {s1} + C_ {s2 }} \]
式2を適用し、2つのコンデンサC s1 およびC s2 εとAの値が同じである場合、次のようになります。
\ [V_ {bridge} =\ frac {d_ {s2} V_ {drive +} + s_ {s1} V_ {drive-}} {d_ {s1} + d_ {s2 }} \]
式3
ここで、d s1 およびd s2 C s1 の電極間の距離を示します およびC s2 、 それぞれ。 d s1 の場合 増加、d s2 同じ量だけ減少し、その逆も同様です。
仮定:
\ [d_ {s1} =d_0- \ Delta d \]
\ [d_ {s2} =d_0 + \ Delta d \]
\ [V_ {drive +} =--V_ {drive-} \]
式3は次のように簡略化されます。
\ [V_ {bridge} =\ frac {\ Delta d} {d_0} V_ {drive +} \]
ご覧のとおり、微分構造では、出力電圧はプルーフ質量変位Δdの線形関数です。ソフトウェアを使用してセンサーの線形性エラーを除去することもできますが、測定精度が向上し、システムのキャリブレーションが容易になるため、線形応答を持つことが望ましいことに注意してください。
結論
質量ばねダンパー構造が加速度を変位量に変換する方法と、静電容量センシングアプローチを適用して、この変位を加えられた加速度に比例する電気信号に変換する方法を確認しました。
また、プルーフ質量変位が適用された加速度に比例するようにするには、質量-ばね-ダンパーシステムのさまざまなパラメーターを適切に選択する必要があることも簡単に説明しました。
次の記事では、マススプリングダンパーシステムの伝達関数を導出して、システムの動作についてより深い洞察を得ます。
私の記事の完全なリストを表示するには、このページにアクセスしてください。
センサー