


ホール効果磁気設計:正面およびスライドバイ構成
位置検出アプリケーションでホール効果がどのように使用されるかを学びます。
位置検出は、ホール効果センサーの最も重要なアプリケーションの1つです。ホール効果デバイスは、印加された磁場の強さを感知します。物体の位置を検出するために、小さな永久磁石を物体に取り付けることができます。物体がホールデバイスに対して磁石を動かすと、磁場の強さが変化します。これらの変更は、オブジェクトの位置を検出するためにシステムで処理できます。
ホール効果ベースの位置検出アプリケーションで使用できるいくつかの異なるセンサー-磁石構成があります。センサーと磁石の構成ごとに、磁石はセンサーに対して異なる方法で移動します。これは、ホールデバイスによって感知される磁場に影響を与え、システムの特性を変更します。
この記事では、ホール効果ベースの位置検出で使用される基本的な磁気構成のいくつかを見て、それらの長所と短所について説明します。
ヘッドオン構成
最も単純な磁気構成は、図1に示す正面検知です。
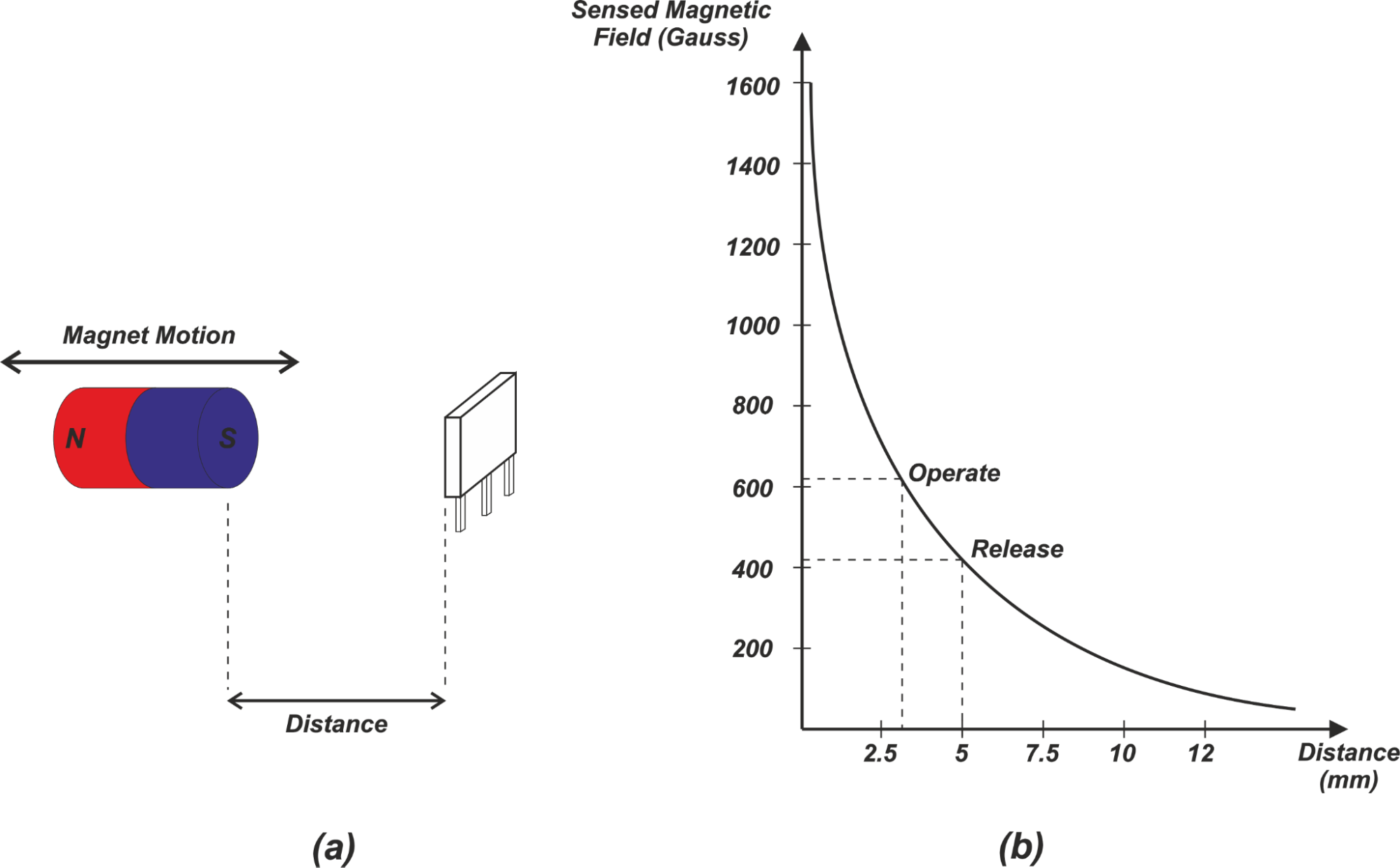
図1。
この場合、磁石の南極はセンサーに直接近づいたり、センサーから離れたりします。磁石がセンサーに非常に近い場合、より多くの磁束線がセンサーの検出面を通過します。ただし、図1(b)に示すように、磁石の南極がセンサーから離れるにつれて、磁場の強さは急速に減少します。
ガウス対距離曲線は、構造のフラックスマップと呼ばれることもあることに注意してください。正面構成の磁束密度は、磁石とセンサーの間の距離の2乗に反比例します。図1(b)に示されている磁束値は、長さが約30 mm、直径が約6mmの磁石によって生成できます。
アプリケーション:オブジェクトの存在の検出
正面構成をデジタル(ON / OFF)ホール効果センサーとともに使用して、物体の存在を検出できます。センサーの磁気動作点と解放点が図1(b)のようになっていると仮定します。磁気動作点は、ホールデバイスがオンになる強化磁場のレベルを指定します。磁気解放点は、ホールデバイスがオフになる弱められた磁場に対応します。
磁石がセンサーに近づくにつれて、磁場の強さはますます大きくなります。約3.1mmの距離では、検出された磁場は、センサーをオンにする磁気動作点(この例では約620ガウス)に等しくなります。磁石をセンサーに近づけると、さらに大きな磁場が発生し、センサーがオンになります。センサーが磁石から離れると、磁場が減少します。
ただし、磁場がリリースポイント(この例では約420ガウス)より小さくない限り、センサーはオンのままです。磁場がリリースポイントを下回った場合にのみ、デバイスはオフになります。このようにして、オブジェクトの存在を検出できます。
正面センシングの制限
この構成は、特にセンサーがオフになる距離の点で精度が低くなります。これは、フラックスマップの傾き(ガウス対距離曲線)がリリースポイントの周りで小さいという事実によるものです。磁気解放点の値の所与の変動は、センサーがオフになる距離の値の比較的大きな変動につながる可能性があります。磁気動作点の同じ変動は、より小さな距離変動につながります。これを図2に示します。
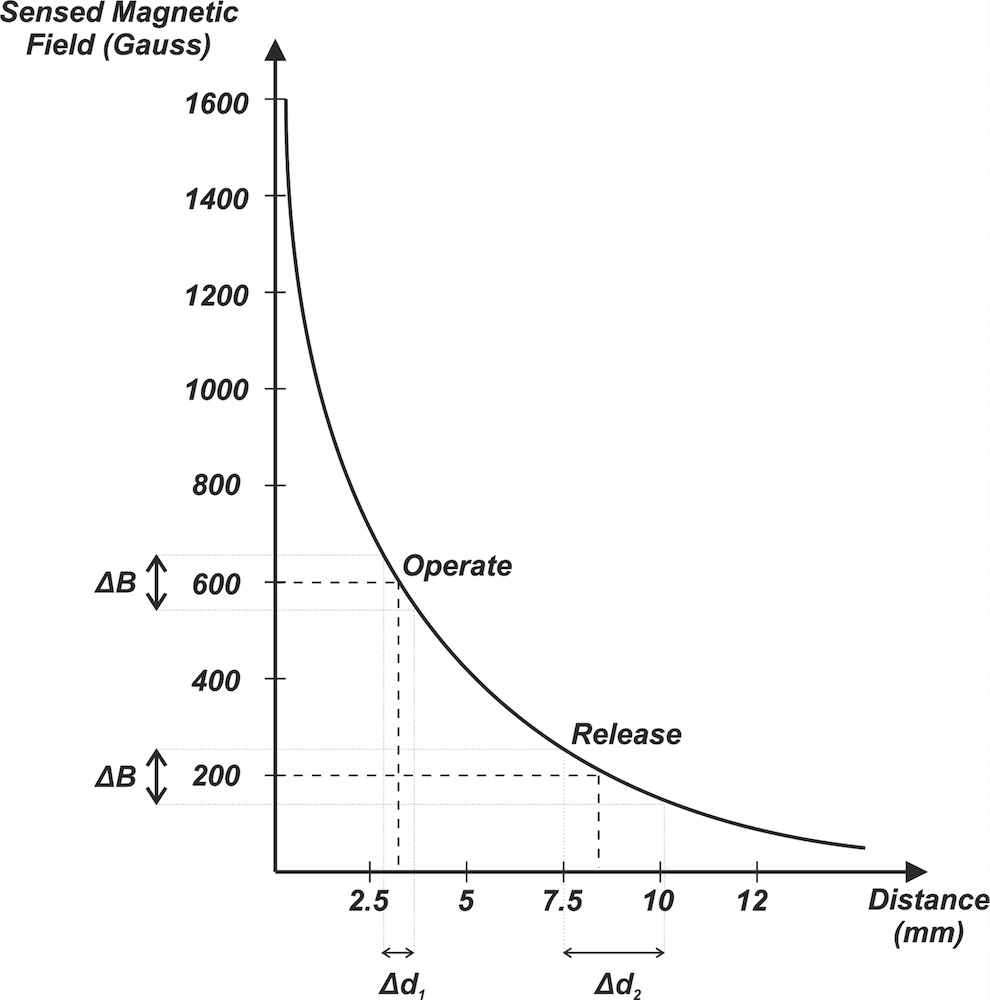
図2
図2に示すように、仮想センサーの動作点と解放点のユニット間の変動がΔBであると仮定します。曲線は磁気動作点でより大きな傾きを持っているため、Δd 1 Δd 2 よりもはるかに小さい 。したがって、磁気動作点に対応する距離は、異なるボード間でより一貫性があります。
もう1つの欠点は、磁力線が非常に急速に減衰するため、大きな変位範囲の検出に正面検知を使用できないことです。さらに、正面構成では、検出されたフィールドと距離の関係は非線形です。これにより、線形位置測定が必要な場合に、長いストロークの動きの検出が困難になります。これらの制限により、ヘッドオンセンシングは通常、精度要件がそれほど厳しくないアプリケーションで近接検出器として使用されます。
ユニポーラスライド-センシングによる
この配置では、磁石の1つの極がセンサーの検出面を越えて横方向に移動します。これを図3(a)に示します。
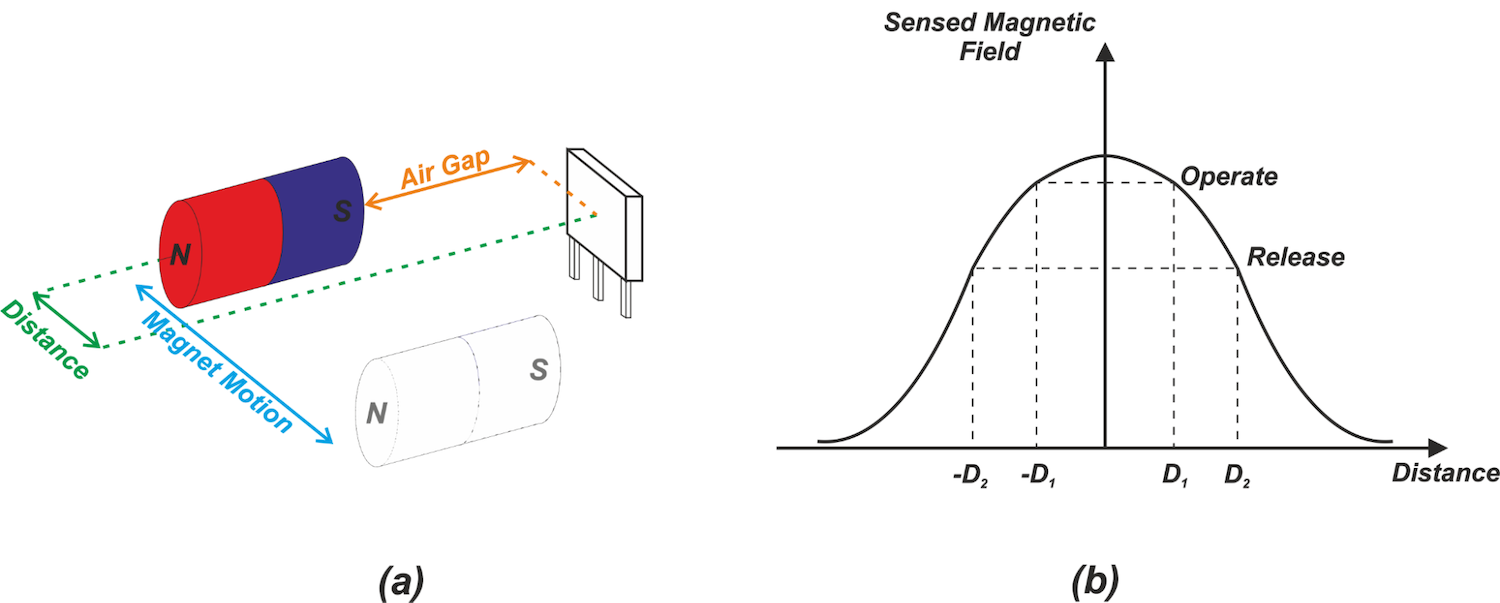
図3
磁極は、センサーを通過するときに一定の垂直距離(図の「エアギャップ」で示されています)にあります。中心位置(距離=0)では、検出された磁場が最大になります。磁石がセンサーから離れるにつれて、磁場は減少します。磁石によって生成される磁場は対称であるため、磁束マップは図3(b)に示すように原点を中心に対称になります。
フラックスマップのピーク値は、図4に示すように「エアギャップ」値によって変化します。
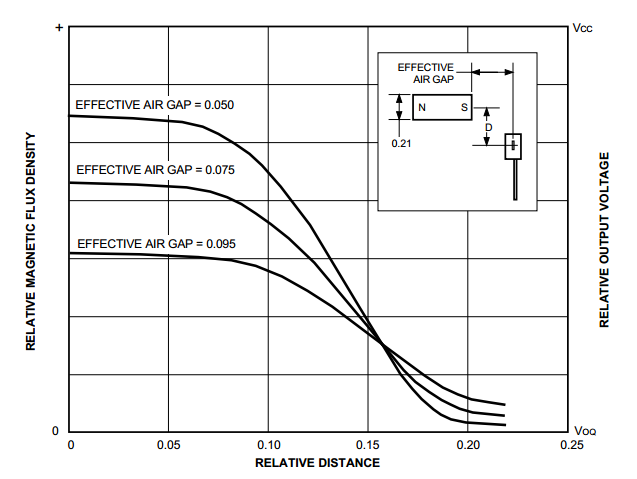
図4。 アレグロの画像提供。
ヘッドオン構成またはスライドバイ構成?
磁気構成の選択は、検出されるモーションのタイプに依存することに注意することが重要です。システムごとに、機械的な制限と機能のセットが異なる場合があります。たとえば、正面構成では、オブジェクトはセンサーを通過できません。この配置は、検出されるオブジェクトが明確な終了位置を持ち、このエンドポイントでのオブジェクトの有無を検出することに関心があるアプリケーションに適しています。
たとえば、スマートフォンのカバーの蓋が開いているか閉じているかを検出するには、正面からの検知が適している場合があります。スライドバイセンシングにはこの制限はありません。オブジェクトがセンサーを通過するかどうかに関係なく使用できます。
スライドバイ構成に関する興味深い機能の1つは、その対称性です。この構造のガウス対距離曲線は原点を中心に対称であるため、動作点と解放点は、センサーに向かって移動しているか、センサーから離れて移動しているかに依存しません。これは、中心線からのずれを検出するときに役立ちます。
他のスライドバイ構成があり、その一部は対称応答を提供しないことに注意してください。次の記事では、ホール効果位置検出アプリケーションで一般的に使用される、より洗練された磁気構成を見ていきます。
私の記事の完全なリストを表示するには、このページにアクセスしてください。
センサー