


簡素化されたCNCモーションコントロールシステム
最近、家族の誰かに、CNC工作機械で使用されているモーションコントロールシステムについて説明するように頼まれました。この個人には製造のバックグラウンドがまったくなく、確かにこれほど複雑で技術的な経験もなかったことに気づき、私は自分の説明を一般的で単純なものに関連付けて、運転のようなアナロジーを簡単に視覚化できるようにする必要がありました。車。

このトピックは本質的に非常に複雑で技術的ですが、このアナロジーは主題を単純化するのにかなり良い仕事をしていると思いますが、それでも何が起こっているのかについての十分な基本的な理解に興味のある人々に提供します。明らかに、そのような高度な技術的主題は、完全な理解を得るために大学の学期全体の大部分を占める可能性がありますが、私たち単純な人々にとっては、運転のアナロジーはうまくいくと思います。しかし、始める前に、いくつかの基礎を築く必要があります。脳内で開始されたコマンドがCNC制御を通過し、最終的には機械の直線軸の1つの動きとして現れる方法の基本を理解する必要があります。
パートプログラム(会話型またはGコード)をコマンドのリストにすぎないと考えてみましょう。これらのコマンドはCNC制御によって編成され、マシンの個々の軸ごとに異なるカテゴリに配置されてから、対応する軸に渡されます。特定の軸のサーボドライブがコマンドを受信すると、そのコマンドは、コマンドの順序に従って軸を移動するために必要な単純な電圧要件に分解されます。次に、その電圧がモーターに印加されます。スピンし、軸を動かします。軸が動いている間、その現在の位置は、モーターの端に取り付けられたエンコーダー、または軸の長さに沿って取り付けられたガラススケールによって継続的に監視されます。この監視デバイスはサーボドライブにフィードバックを提供するため、必要に応じて電圧コマンドを変更できます。電圧が高いほど、モーターの回転が速くなり、遅れている場合は軸が追いつきます。電圧が低いということは、モーターの回転が遅いことを意味します。したがって、コマンドされたモーションよりもはるかに先に回転し始めた場合、軸が遅くなります。
さて、それが邪魔にならないように、私たちの運転のアナロジーを適用しましょう。まず、従うべきいくつかのコマンドが必要です。たとえば、最終目的地に移動するルートがカッターツールパスであり、途中の制限速度標識がコマンドされた送り速度として機能するとします。あなたの脳はCNC制御であり、あなたの筋肉はサーボドライブとして機能し、あなたの四肢はあなたの軸を制御するサーボモーターになることができます。フィードバックには目とスピードメーターを使用します。さて、人生には完璧でも正確でもないので、私たちは命令された位置にある程度の許容範囲を許容する必要があります…つまり、道路の幅全体が私たちの位置決め許容範囲であり、ブラックトップに留まっている限り、行ってもいいです!
この最初の例えでは、廃墟となった高速道路に自分が駐車しているところを想像してみてください。道路は目の前の矢印のようにまっすぐに配置されています。道路の真ん中にある黄色の二重線をたどって、1マイルの距離を移動するように指示されました。この道路の制限速度は、100mphです。まず、脳が足の筋肉にアクセルペダルに圧力をかけるように指示すると、車が動き始めます。黄色い線をたどるには、脳は目からの視覚的なフィードバックを使用して、腕の筋肉を制御し、車両を直線的に動かし続けます。スピードメーターから受け取ったフィードバックに応じて、脳も次のことを行う必要があります。足首の筋肉を制御して、加速器に加えられる圧力を増減して、100mphの指令速度を維持します。ここでは、位置の許容範囲は実際には問題ではありません。わかりました。これは非常に単純化されていると思いますが、私の運転の例えをどのように適用できるかがわかったので、さらに1、2ステップ進むことができます。
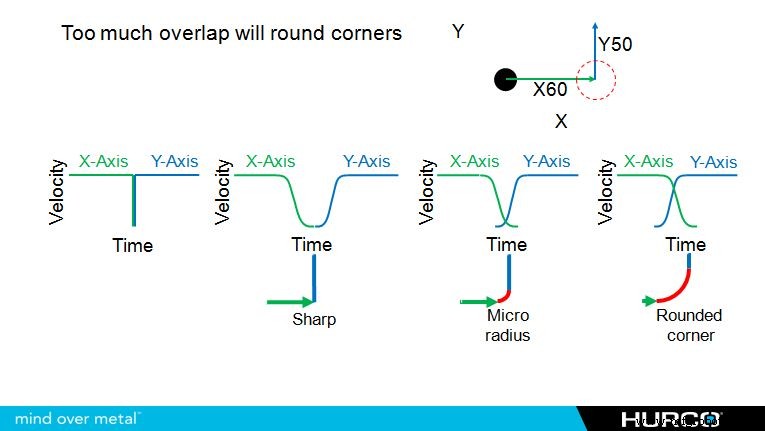
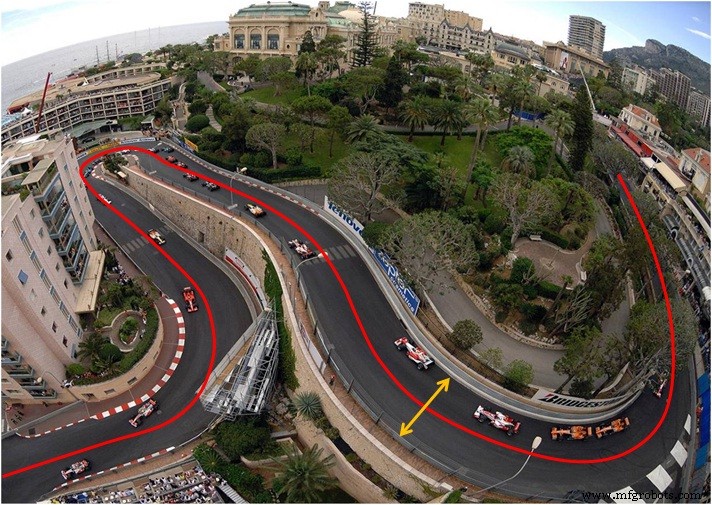
上記と同じコマンドを使用して(100mphの速度で1マイルの二重の黄色い線をたどり、許容範囲として道路の幅全体を使用します)、アナロジー2に進みましょう...私たちは真ん中に座っています次の1マイルで遭遇するまっすぐな道の最後のビット。私たちの前に敷設された道路は風が強く丘陵であり、私たちの命令された拘束内での操作は今回はもう少し難しいでしょう。私たちは100mphのコマンド速度まで加速しますが、すぐに最初の障害物が表示されます…右に完全に90度回転します。このターンをうまくナビゲートできず、現在の速度を維持できないことに気付いたので、速度を落とさなければなりません。曲がり角でスムーズな弾道を見つける必要があります。これにより、指示された速度にできるだけ近い速度を維持できますが、道路から逃げることはありません。視覚デバイスから受け取ったフィードバックに反応して、脳は必要な動きを制御するコマンドを送信し、ターンを正常にナビゲートするために速度と軌道経路を調整します。
その後、ほぼすぐに、さらに困難な障害に直面します。前半は上り坂、後半は下り坂の「S」カーブです。この状況は、上記の単純な90度の方向転換とほぼ同じように処理されますが、道路上で安全に保ちながら、可能な限りスムーズで最速の経路を実現するために速度と軌道を制御します。これで、高度の変化にも対応する必要があります…ターンの最初のセクションを登っている間にアクセルへの圧力を上げますが、その圧力を下げ、必要に応じて最後のセクションでブレーキをかけ、重力が引き継ぎ始めたときにコマンド速度の100mphを超えないようにします。この行動と反応は、私たちが遭遇するすべての障害に対して、最終目的地または最終目的地に到達するまで続きます…プログラムの終わりです!
モーションコントロールについて話すときは、「ブロック先読み」と呼ばれるものについても説明する必要があります。これは通常、コントロールが事前に処理できるブロックの数で測定され、コントロールが次の障害物に備えることができます。私たちの運転の例えでは、ブロック先読みは、ダッシュボードに取り付けられたLCDディスプレイとして示され、トラックの地図が提供されるため、現在の障害物の軌道を変更できる可能性があります。将来の障害をスムーズに実行するためのより良い位置に。明らかに、カッターツールパスが複雑になるほど、フィニッシュラインへの最もスムーズで最速のルートを維持するために必要となる可能性のある先読みが利用可能になります。すべての工作機械メーカーは、ブロックの先読みを同様に処理する手段を備えていますが、他のビルダーよりも効果的なものもあります。
HurcoのWinMaxコントロールには、UltiMotionと呼ばれるものがあります。これは、可変ブロックの先読みを提供する特許取得済みのソフトウェアベースのモーションコントロールシステムです。これにより、コントロールは必要に応じて将来最大10,000ブロックを確認でき、特に先読みが必要なより複雑なツールパスでは、サイクルタイムを最大30%短縮できます。明らかに、上記の最初の2つのアナロジーのような、より単純なカッターパスでは、コントロールは最後のシナリオよりもはるかに少ない先読みを必要とします。したがって、コントロールのRAMメモリの多くが解放され、他のもの。コントロールの現在のニーズに「適応」するこの独自の機能を持たないコントロールは、使用可能なコントロールRAMメモリを再利用できず、この種の変動性の恩恵を受けることができません。

CNCマシン