


バッテリー駆動のIoTシステムでモーターを駆動する
バッテリー駆動のモーターシステムのバッテリー寿命を延ばすのに役立つモータードライバーの設計手法を学びます。
スマートメーター、スマートサニテーション製品、ビデオドアベル、ロボット玩具、個人用衛生製品、電子ロックなど、多くのバッテリー駆動システムとモノのインターネット(IoT)アプリケーションには、モーター、ソレノイド、またはリレーが含まれています。バッテリーとモーターの物理的相互作用により、バッテリー電圧の変化に応じてシステムを確実に動作させる、待機電力を最小限に抑えてシステムの寿命を延ばす、起動時と停止時にモーターに大電流を供給するなど、いくつかの興味深い設計上の課題が生じます。
>この記事では、これらの設計上の課題を克服するためのヒントをいくつか紹介します。
バッテリー駆動モーターシステムの概要
モータードライバーが使用できるバッテリー電圧範囲は、バッテリーの化学的性質、放電の深さ、温度、負荷電流、および直列または並列に接続されたバッテリーセルの数によって異なります。バッテリーモデリングは複雑な科学ですが、開回路電圧(V OCV )を使用した単純なバッテリーモデルから始めましょう。 )、内部バッテリー抵抗(R BAT )、およびバッテリー端子電圧(V BAT )、図1 に示すように 。
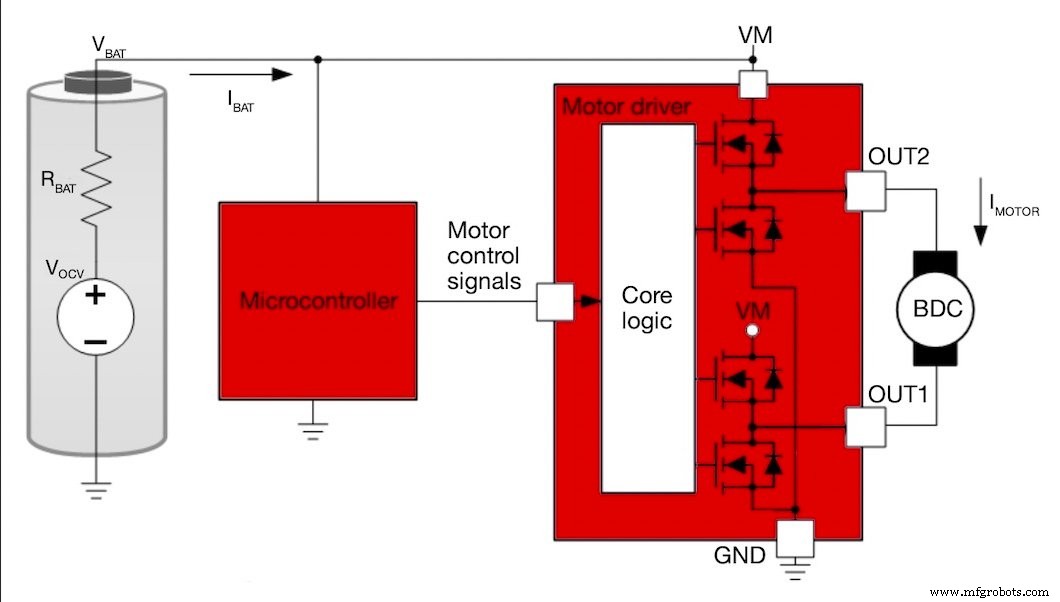
図1。 モータードライバーとモーターを備えたバッテリー駆動システムのブロック図。
表1 さまざまな電池の化学的性質の電池電圧範囲の例をいくつか示します。
| V BAT 完全に充電されたバッテリーの | V BAT 消耗したバッテリーの | R BAT | ||
| 2 AA(アルカリ性)、Duracell OP1500 | 1.7V /セル 合計3.4V | 0.8V /セル 合計1.6 V | | 2,400 mAh * |
| 3 AAA(アルカリ性)、Panasonic LR03AD | 1.55V /セル 合計4.65V | 0.8V /セル 合計2.4V | 合計405mΩ(平均) | 2,640 mAh |
| 4 AA(アルカリ)、エナジャイザーE91 | 1.5V /セル 6V /セル | 0.8V /セル 合計3.2V | 150-300mΩ/セル(フレッシュ) 合計600〜1200mΩ(新鮮) | 2,500 mAh * |
| 1リチウムイオン、パナソニックNCR18650BF | 4.2 V | 2.5 V | 3,200 mAh | |
| 2リチウムポリマー、Farnell SR674361P | 4.2V /セル 合計8.4V | 2.75V /セル 合計5.5 V | | 2,000 mAh |
*他のバッテリーデータシートパラメータから計算されたパラメータ
表1。 さまざまな電池の化学的性質とスタックアップのおおよその電池パラメータ。
R BAT およびV OCV V BAT の主要な貢献者です バッテリーの寿命を超えて変化します。バッテリーの充電がなくなると、V OCV 減少し、R BAT 増加します。負荷がバッテリーから電流を引き出すとき(I BAT )、V BAT R BAT の両端の電圧降下のために減少します 。
図2 V OCV 間の関係を示します 、R BAT およびI BAT バッテリーの寿命全体。
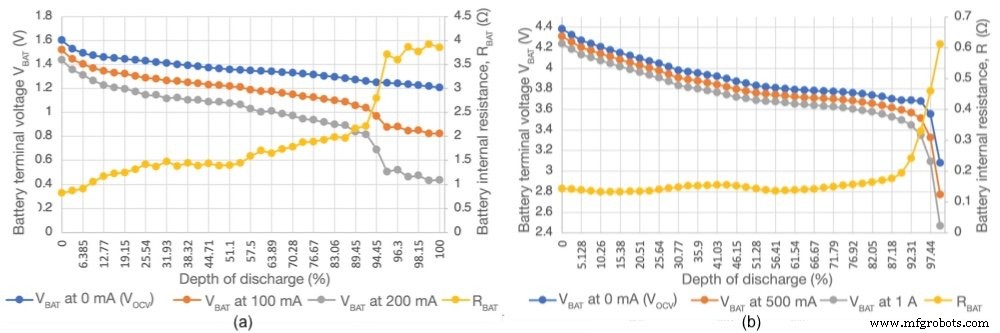
図2。 アルカリ性のVBATおよびRBATのプロット(a) およびリチウムイオン(b) TIの化学物質識別データベースからのデータに基づくさまざまなバッテリー負荷電流(IBAT)用のバッテリー。
放電深度(DoD)は、ミリアンペア時(mAh)で表される完全なバッテリー充電容量に対するパーセンテージとしてバッテリー寿命を表します。 100%DoDは、完全に放電したバッテリーを表します。
ワイドV BAT の設計 範囲
V BAT DoDおよびI BAT による変更 、モータードライバーの電源レール定格は、可能なバッテリー電圧の範囲に対応する必要があります。たとえば、24 Vシステム用に設計された多くのモータードライバーの最小供給レールは4.5 Vです。4つのアルカリ電池が直列に接続されている場合、最小供給定格が4.5 Vのモータードライバーは、バッテリーが完全になくなる前に低電圧ロックアウトを使用して無効になることがあります。ドレイン。
Texas Instruments(TI)のDRV8210およびDRV8212は、供給定格が1.65 V〜11 Vのバッテリ駆動アプリケーション用に設計されたモータードライバの例です。これは、2セルリチウムバッテリスタック(8.4 V)またはほぼ放電した2セルアルカリバッテリースタック(1.65 V)。
低電力スタンバイモードの設計
バッテリ駆動のシステムは、ほとんどの動作寿命をスタンバイ状態で過ごします。たとえば、消費者は電動ブラインドを1日2回だけ操作したり、電子ロックを1日20回ロックおよびロック解除したりできます。ガスメーターまたは水道メーターのバルブは、1年に1回しか作動できません。これらのシステムで長いバッテリ寿命を実現するには、システム全体のスタンバイ電流を低くする必要があります。
システム内の周辺機器の電源レールにロードスイッチを追加することは、スタンバイ電流を低く保つ1つの方法です。もう1つの方法は、バッテリアプリケーション用に最適化されたスタンバイ電流の少ないデバイスを使用することです。 DRV8210およびDRV8212のスリープ電流は84.5nA未満であり、システムのスタンバイ消費電流を削減するのに役立ちます。システムのスタンバイ電流を減らす他の方法は、抵抗分割器をなくし、動作していないときにプルダウン抵抗を備えたデバイスロジックピンを0Vに設定することです。
大電流を管理してエネルギー消費を削減し、動作寿命を延ばします
モーターからの大電流は、バッテリーシステムに2つの問題を引き起こします。エネルギーを非生産的に使用することと、R BAT の両端の電圧降下により、システムがバッテリーの少ないロックアウト状態になる可能性があることです。 。大きなモーター電流の主な原因は2つあります。モーター始動時の突入電流とストール電流です。 図3 これらの電流の例を示します。
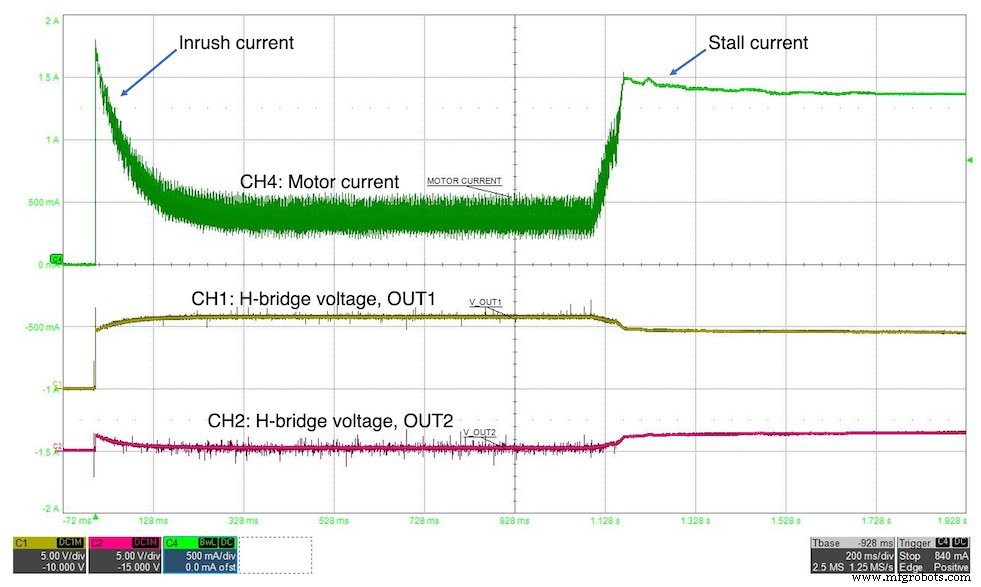
図3。 突入電流と失速電流。
パルス幅変調デューティサイクルをランプすることによってモーターのソフトスタートルーチンを実装すると、モーター始動中の大きな突入電流を軽減できます。 図4 は、4つのAAAバッテリーの消耗したスタックのハードスタートとソフトスタートの実装例を示しています。
図4(a) 、モーターの突入電流により、ハードスタート中にR BAT の両端の電圧降下により、バッテリー電圧が低下します。 。このシステムがリセットされるか、3.5 V付近で低電圧ロックアウト状態になると、モーターは最初の起動を超えて駆動できなくなります。
図4(b) は、ソフトスタートを使用すると、電源レールの電圧降下がどのように低下するかを示しています。これにより、バッテリが消耗したシステムの動作寿命を少し長くすることができます。
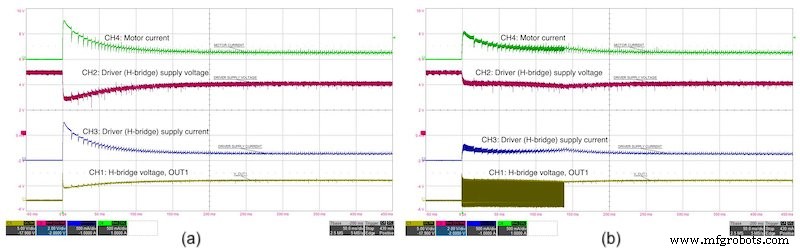
図4。 ハード-(a) およびソフトスタート(b) DRV8210を使用して直列に接続された4つの消耗したAAAバッテリーの突入電流。ここに示すソフトスタートルーチンは、モーターの始動時にデューティサイクルを0%から100%にランプします。
ストール電流の制御を支援するために、電流検出抵抗を追加すると、マイクロコントローラーがストールを検出し、モータードライバーを無効にしてから、長期間にわたって大きなストール電流を引き出すことができます。ストール状態は、意図しない機械的閉塞または機械的負荷がエンドストップに到達することで発生する可能性があります(スマートロックで完全に作動するデッドボルトなど)。
図5 は、DRV8212を使用したシステム実装の例を示しています。
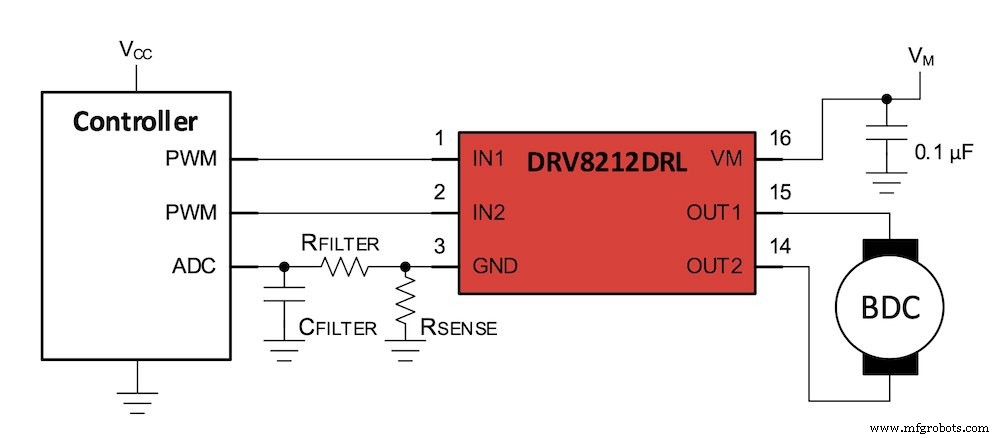
図5。 DRV8212を使用したストール検出実装のブロック図の例。
マイクロコントローラのアナログ-デジタルコンバータは、センス抵抗の電圧を測定し、その電圧をファームウェアに保存されているしきい値と比較します。現在の測定値が一定時間しきい値を超えると、マイクロコントローラーはモータードライバーを無効にして電力を節約します。突入電流が誤ってストール検出をトリガーしないように、ストールを検出する期間を構成することが重要です。
図6 は、失速検出が実装された失速状態でのモーター電流プロファイルを示していますが、図3 は、ストール検出なしのモーター電流波形を示しています。
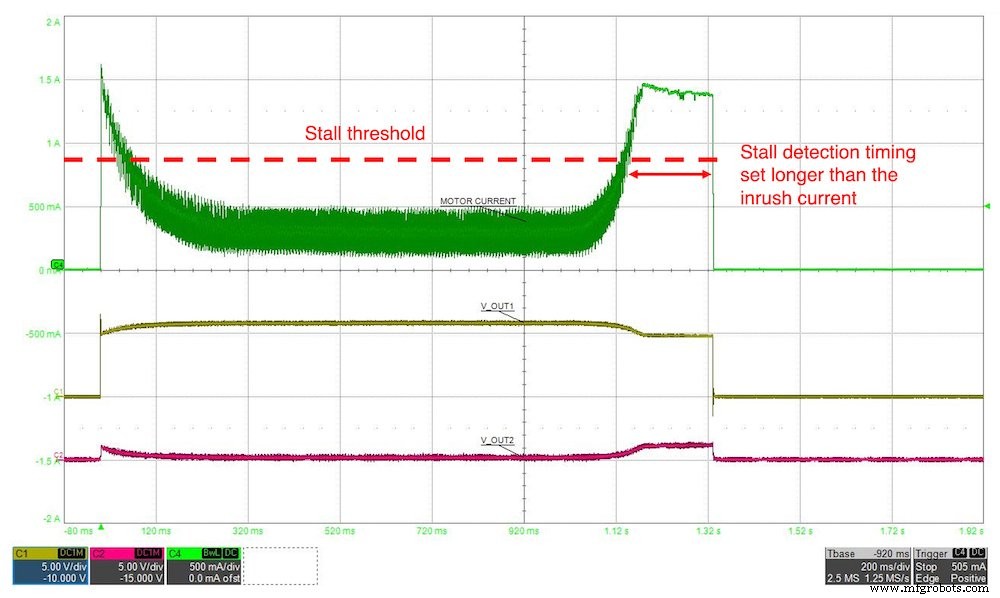
図6。 失速検出を備えたモーター電流プロファイル。
バッテリーメーカーはバッテリー容量をmAhで測定するため、突入電流の大きさとストール電流の持続時間の両方を制限すると、バッテリーの寿命を延ばすのに役立ちます。
結論
バッテリの動作寿命が有限であり、バッテリ電圧の変動が大きく、モーター電流が大きいため、モーターを使用するバッテリ駆動システムの設計は難しい場合があります。バッテリーの電圧範囲に対応したモータードライバーを使用すると、追加のブーストコンバーターが不要になり、バッテリーの最小動作電圧に対応できるため、設計作業が容易になります。
システム全体のスタンバイ電流を最小限に抑え、低電力スリープモードのモータードライバーを使用することで、バッテリーからの無駄なエネルギー消費を削減します。ソフトスタートとストール検出の両方の手法は、システム内の大電流の大きさと持続時間を減らすことで、バッテリーアプリケーションの動作寿命を延ばすのにも役立ちます。
これらの技術を使用することにより、システム設計者は、スマートサニテーション製品、電動ブラインド、電子スマートロックなどのバッテリー駆動システムの動作寿命を延ばすことができます。
業界記事は、業界パートナーが編集コンテンツに適さない方法でAll About Circuitsの読者と有用なニュース、メッセージ、テクノロジーを共有できるようにするコンテンツの形式です。すべての業界記事は、読者に有用なニュース、技術的専門知識、またはストーリーを提供することを目的とした厳格な編集ガイドラインの対象となります。業界記事で表明されている見解や意見はパートナーのものであり、必ずしもAll AboutCircuitsやそのライターのものではありません。
モノのインターネットテクノロジー
- セルラーIoTの調査:コスト、バッテリー、データ
- スマートマニュファクチャリングとIoTが次の産業革命を推進しています
- LoRaテクノロジーがIoTの採用を促進し、生活を変えています
- 強力なリーダーシップがIoTの採用を推進しています
- IoTで組み込みシステムを保護するための6つのステップ
- 古いものとIoTが出会う場所、SaaS統合
- ERPおよびMESシステムはIIoTに追いつくことができますか?
- IoTセキュリティとは何ですか?
- パートナーシップは無限のIoTデバイスのバッテリー寿命を目指しています
- 産業用IoTは、私たちが約束した万能薬ではありません…まだ
- 産業用IoT注入空気品質監視システムのアプリケーション