


スマートシティ:高度道路交通システムにおけるLIDARの事例
スマートシティの課題の1つの側面は、高度道路交通システムの導入です。サンフランシスコ市交通局(SFMTA)でのLIDARセンサーを使用したパイロットプロジェクトは、サンフランシスコのVisionZeroポリシーの一部である都市のスマート信号パイロットにLIDARがソリューションを提供した方法を示しました。
サンフランシスコの街を旅行中に毎年約30人が命を落とし、200人以上が重傷を負っていると考えられているため、市のビジョンゼロ政策の目的は交通安全を改善することです。このより大きなフレームワーク内でのスマート信号機パイロットの目的は、マルチモーダルインテリジェント信号機システム(MMITSS)、専用短距離通信(DSRC)、交通信号優先(TSP)、および緊急車両プリエンプション(EVP)の使用を調査することでした。 )緊急車両と輸送車両を優先する技術。さらに、MMITSSは歩行者や自転車を検出して、先行間隔、スクランブル、保護された位相調整を提供できる必要があります。
2020年1月に終了した最初の概念実証では、5つの交差点にLIDARセンサーを配置し、96%の精度でデータを正確かつ匿名でプロファイリングできることを実証しました。 2番目の概念実証では、データレイヤーを信号制御ネットワークに追加して、ITSの「インテリジェンス」を有効にすることを想定しています。これは進行中であり、2021年初頭に終了する予定です。
テクノロジー、その展開、および得られた結果に光を当てた2人の関係者に話を聞きました。ここでは、会話のハイライトを紹介します。まず、LIDARセンサーテクノロジープロバイダーであるQuanergyの最高マーケティング責任者であるEnzoSignoreと話をしました。次に、SFMTAのプロジェクトの独立した戦略実行コンサルタントであるPaul Hoekstraと一緒に、実際の概念実証プロジェクトを深く掘り下げました。
Lidar:オブジェクトのIDを匿名で追跡する
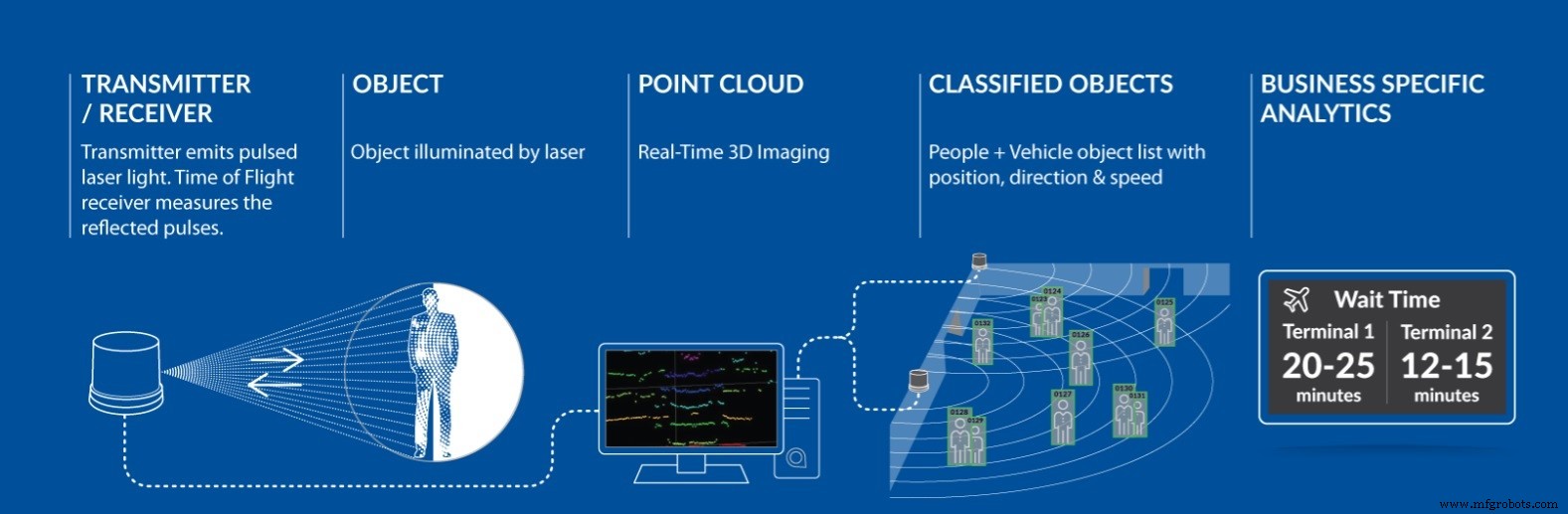
QuanergyのEnzoSignore は、このタイプのアプリケーションにおけるLIDARテクノロジーの利点を説明しています。これには、人と車両のカウントとフロー管理が必要であり、特に顔認識が禁止されています。
スタジアムやスマートシティなどのアプリケーションにおけるLIDARテクノロジーの重要な価値提案は、さまざまなセンサーポイント上を移動するオブジェクトを匿名で追跡する機能です。たとえば、車が多くの交差点を通過したり、歩行者が多くのエリアを通過したりします。 Quanergyができることは、オブジェクトにIDを割り当てることです。そのIDは、監視対象のエリアでの移動中、オブジェクトに残ります。
複数の交差点を通過する場合、エッジコンピューティングには複数のセンサーと複数のサーバーが必要になるため、これを行うのは非常に複雑です。ほとんどのテクノロジーは、管理しているエリアのみをサイロ化して表示し、あるエリアと別のエリアの境界を越えると、IDが失われ、別のIDが与えられます。このアプローチでは、人々のすべての流れを見失い始めます。
自動IDハンドオーバーと呼ばれる技術があり、人または車両のIDをあるエリアから別のエリアに渡します。視野がある限り、同じIDがオブジェクトに残ります。これにより、非常に優れたエンドツーエンドの可視性と追跡が可能になります。これは、たとえば縁石からゲートまで、乗客の体験を最適化できる空港や、ショッピングセンターや都市にとって重要になる可能性があります。各個人の単一のIDは、エンドツーエンドの分析を可能にするのに役立ちます。
QuanergyのセンサーであるMシリーズは、フロー管理アプリケーション用に特別に設計されたMQ-8などの長距離検出を提供します。これらのセンサーの違いは次のとおりです。一般的なLIDARセンサーは、対称ビーム構成になっています。センサーを平らに取り付けると、通常、ビームの半分が空に行き、ビームの半分が地面に行きます。歩行者の景色を見下ろす街灯柱に高さ3メートルで取り付けられている場合、この構成では、梁の半分が無駄になります。
私たちの設計では、すべてのビームが実際に下を向いているため、地面を対称的にカバーすることができます。つまり、人が視野を横切って歩いているときに死角がないということです。これにより、視野内のどこにいても人や車両を中断することなく追跡できます。 70m(15,000平方メートル)の範囲までの物体を見ることができます。これは非常に広い領域であり、そうでなければ同様のカバレッジを実現するために多くのカメラが必要になります。したがって、これによりセンサーの数とコストが削減されます。
顔認識に関連するプライバシーの問題を克服する
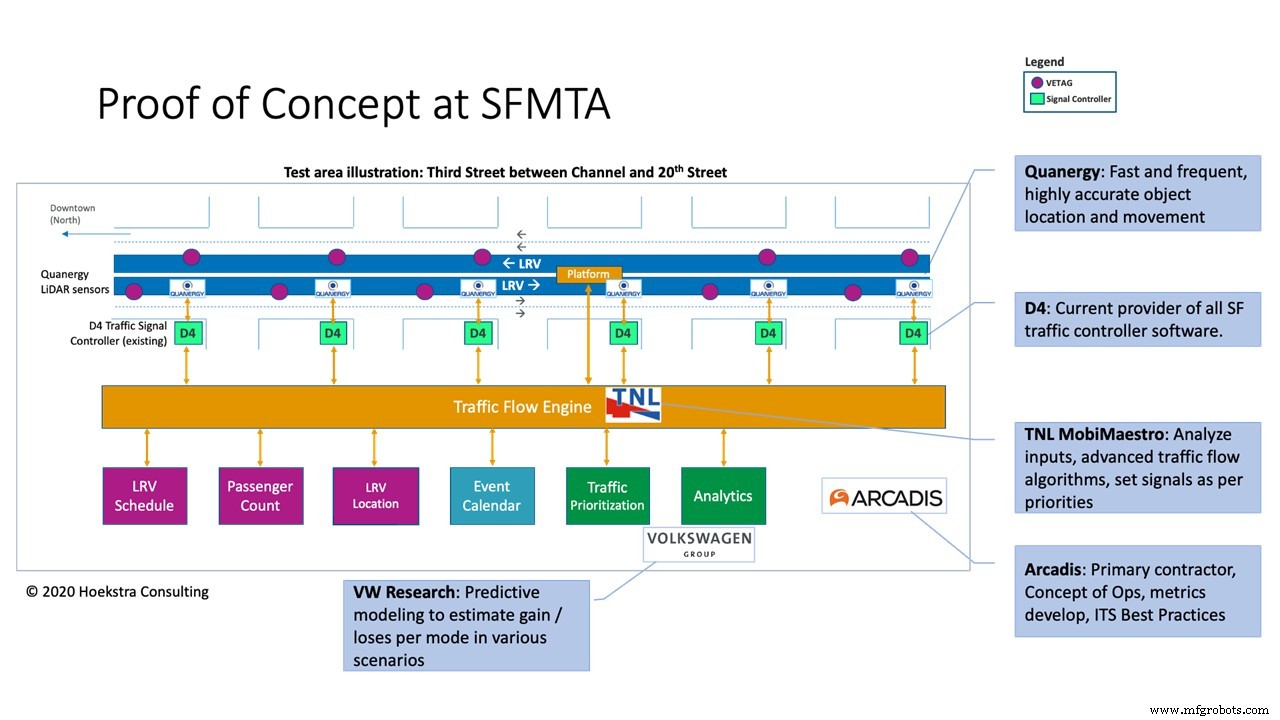
Paul Hoekstra、SMTA用 は、3 の5つの交差点での最初の概念実証(PoC)の実装と結果の背後にある考え方を説明しています。 通り、およびカバレッジを拡大する計画。
2019年4月に、このプロジェクトのパートナーとしてSFMTA、Cisco、Quanergyとの協力を開始しました。当初、Ciscoパッケージの一部として、DSRCセンサーがありました。廊下や高速道路でカバーしているすべての車を聞くためだけにそれらを使用していることがわかりました。すべての車の1%未満が実際にそのDSRC信号をブロードキャストしていることがわかりました。このユースケースの観点から、トラフィックフローの測定にDSRCを使用することはできないという結論に達する必要があります。決定を下すのに十分なほど重要ではありません。
この時点で、Quanergyセンサーを備えた最初の(PoC)が完了し、2番目のPoCの真ん中にいます。
最初のPoCでは、20個のLIDARセンサーを取得し、3 の5つの交差点に設置しました。 昨年オープンした新しいバスケットボールスタジアムの近くの通り。 QuanergyQORTEXソフトウェアを実行しているCiscoTRXを使用したエッジコンピューティングがありました。 LIDARからのデータはTRXボックスを経由し、Qortexソフトウェアはデータをネットワークに公開します。ネットワークはデータセンターに送られます。データセンターは、すべてのメッセージを1週間に3,000万回保存するCiscoKineticプラットフォームを実行する小さなVMクラスターです。
毎週日曜日にレポートが公開されます。1つは車両に関するもので、交差点のLIDAR IDによって車両を識別し、時間、曜日、どこから来たのか、どこに行ったのかなど、さまざまな属性が含まれています。停車する頻度、停車する時間、速度、イベントがありました(イベントカレンダーから)。このようにして、すべての交差点を接続し、廊下を通って車両を追跡することができます。そして、「これは、廊下の南側から北に向かって入った量であり、その後、何台がオフになったのかなど」と言うことができます。
QuanergyのQORTEXを使用して、それを調整し、96%の精度を達成しました。 LIDARでIDを数えるだけでは不十分です。入力と同じIDが出力にあることを確認するロジックを構築する必要があります。そのロジックを使用して、交差点を通過する車を追跡できます。ストップとは何かを定義するロジックがあります。したがって、96%の精度が最終的に得られた場所であり、非常に正確です。歩行者の場合、定義したゾーンを使用して、人が縁石の上にいるか外にいるかを確認できます。人が横断歩道の境界の内側にいるか外側にいるかを確認できます。車が人にどれだけ近かったかがわかります。この種のデータを使用して、ニアミスのレポートを作成できます。ニアミスとは何かを定義しました。ベクトル、速度、衝突する時間を計算し、それが特定の範囲内にあるかどうかを、ニアミスと呼びます。
これが可能なのは、QORTEXからのデータが非常に正確であり、誰も特定しなくても確認できるためです。識別可能な個人情報は保存していません。人はただの点です。そして、車はただのブロックです、あなたはそれがどんな種類の車であるかを知りません。サイズに基づいて分類します。
最初のPoCはすべて分析に関するものでした。 2つ目は、交差点の数を増やしています。これで5つになり、10に進みます。つまり、より大きな廊下です。
次に、現在キャビネット内にロックされているすべてのデータを階層化します。キャビネットには信号コントローラーがあり、コントローラーには多くのアクチュエーターがあります。これらは、車両、歩行者用押しボタン、またはライトレールトラック内のセンサーをループ検出する可能性があります。信号機の優先順位付けがあります。これらはすべて、組み込みの信号コントローラーに組み込まれています。
そのため、現在行っているのは、信号コントローラーとの双方向の情報交換を可能にすることです。プラットフォームとバス停で、LIDARデータやオブジェクト分類(これも完全に匿名)などの交差点からすべてのデータを取得します。これらのセンサーのオブジェクト分類(すべてセンサーで処理されます)により、人数と分類がわかります。たとえば、車椅子に乗っている人がいるのか、ベビーカーを押している人がいるのか、それとも彼らがいるのかなどです。自転車を持っています。これらの要因の多くは、輸送車両の滞留時間を決定します。そこにいる人の数に基づいて予測される滞留時間を知りたいのです。
バックエンドシステムから、車両の数を取得します。そして、分析を使用して、たとえば20秒の滞留時間または32秒の滞留時間が必要かどうかを判断できます。次に、10個の交差点すべてを推定できます。
輸送回廊全体をネットワークとして扱う
廊下全体を最適化するために、人や車がどこにあり、どのくらいの期間かを正確に知ることなしにそれを行うことはできません。これは、コリドー全体を個々のノードとしてではなく、ネットワークとして扱うことを意味します。これは、高頻度でアルゴリズムを実行することを意味し、現在、1ヘルツより速く進む必要があるかどうかを議論しているので、1秒ごとにすべてを再計算します。
次に、実際に信号コントローラーに指示します。北行きで緑になります。これでループが閉じます。シスコのサプライチェーンの仕事から学ぶと、それが交差点を通過する唯一の方法であることがわかります。すべてのテクノロジーが利用可能ですが、それはすべてのサイロを最適化するだけです。このようにして、統合されたトラフィック管理という新しいパラダイムで大きな飛躍を遂げています。
サンフランシスコにはすでに7,000台のカメラがあります。しかし、カメラは2D画像しか提供しません。場所の精度は、LIDARで達成できる精度よりも低くなります。 Lidarは、雨の中、夜間は常に機能します。そして、それはプライバシーの問題から非常に遠く離れています。人々が追跡されていること、または認識できることを知った瞬間、人々が彼らを保護するために政府を信頼していないという問題があります。
このプロジェクトの成果は、緊急車両が緊急事態に対処する際に優先順位を付け、交通機関のタイミングと停車地を最適化し、公共交通機関が利用できない場合は車を小隊に乗せて、廊下をより効果的に移動できるようにすることです。
センサー