


飛行時間センサー(ToF)はどのように機能しますか? ToF3Dカメラを見てください
飛行時間センサーはどのように距離を決定しますか? 3Dカメラの例を使用してToFカメラの詳細をご覧ください。
飛行時間センサーはどのように距離を決定しますか? 3Dカメラの例を使用してToFカメラの詳細をご覧ください。
携帯電話と自動車のスペースをめぐって競合する3つの主要な3Dイメージングテクノロジーがあります。これらのテクノロジーは、立体画像、構造化光投影、および飛行時間型(またはToF)カメラです。これらのデバイスが生成するデータは、歩行者検出を提供し、顔の特徴に基づいてユーザーを認証し、手の動きを検出し、SLAM(同時ローカリゼーションとマッピング)アルゴリズムをフィードすることができます。
この分野で最大のプレーヤーの2つは、amsとInfineonです。執筆時点では、amsは各タイプのセンサーの1つを搭載しており、インフィニオンは飛行時間センサーのみに焦点を当てています。
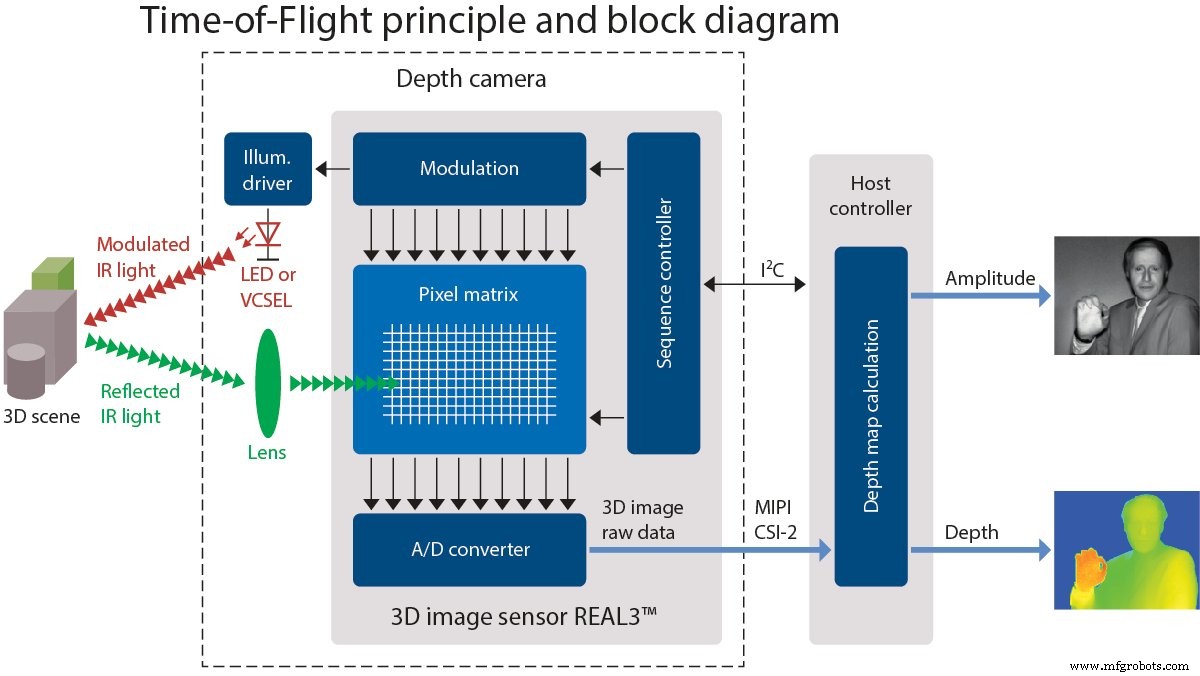
この記事では、pmdtechnologiesの3Dカメラ開発キット「picoflexx」に焦点を当てて、飛行時間センサーの背後にある技術について説明します。 (質問する前に、「picoflexx」と「pmdtechnologies」の両方がすべて小文字でWebサイトに表示されます。)
pico flexxは、インフィニオンとpmdが共同開発した3DイメージセンサーREAL3を中心に構築されています。
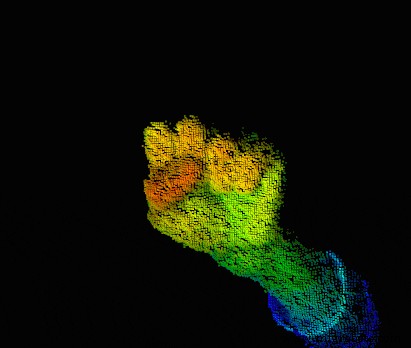
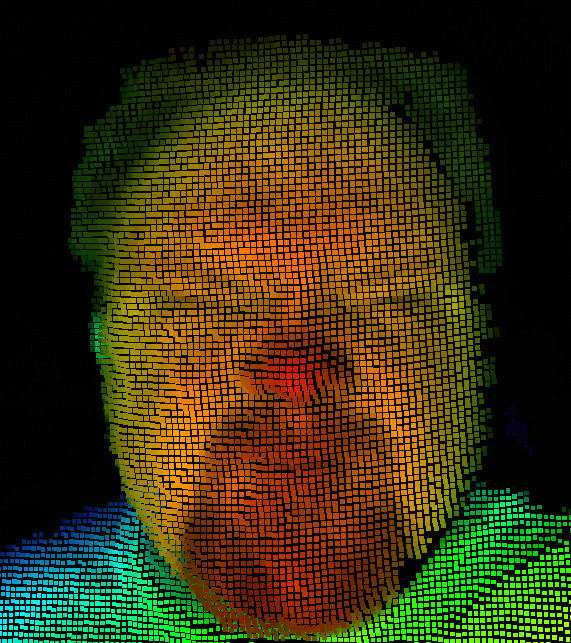
2019年4月29日にpmdtec.comから取得した手の偽色の3D画像。センサーから手までの距離に基づいて、色が個々のピクセルにマッピングされます。 (赤は近く、青は遠い)
pmdがこの記事用のデバイスを提供してくれたことに注意してください。
Time of Flightセンサーとは何ですか?
飛行時間センサーは、媒体を通過する距離を移動するのにかかる時間を測定します。通常、これは、波パルスの放出、物体からの反射、およびToFセンサーへの戻りの間に経過した時間の測定値です。飛行時間型カメラは、ToF測定を利用して、カメラとオブジェクトまたは環境との間の距離を決定し、個別に測定されたポイントによって生成された画像を作成するデバイスです。
ToFカメラのアプリケーションには、レーザーベースのスキャナーレスLiDARイメージングシステム、モーションセンシングとトラッキング、マシンビジョンと自律走行のためのオブジェクト検出、地形マッピングなどがあります。
しかし、これらの測定はどのように達成されますか?
以下に、移動時間を使用して距離を決定する3つの方法を示しました。
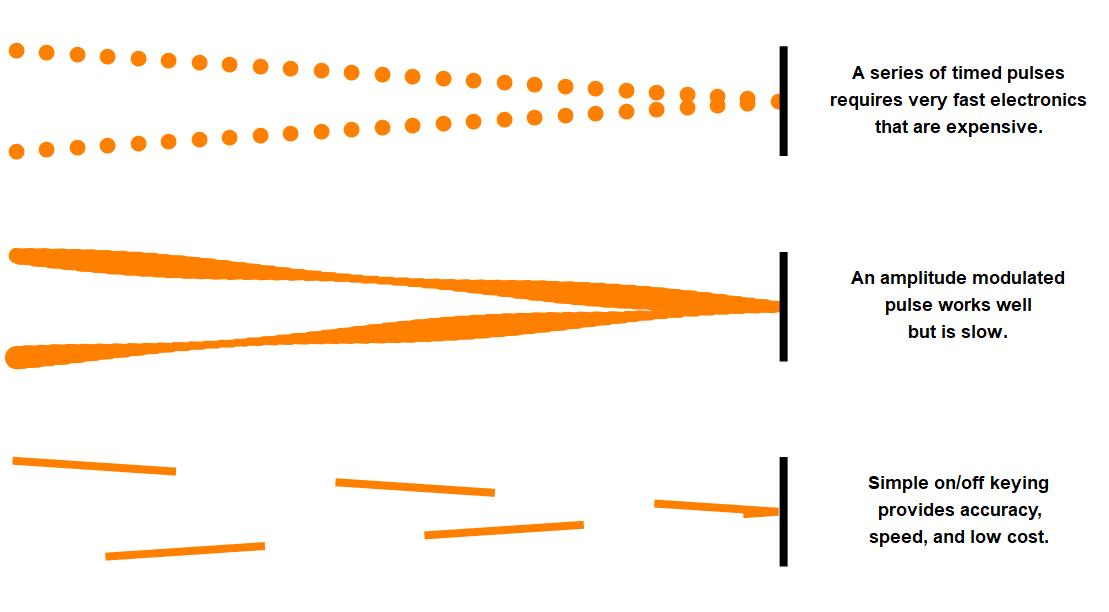
移動時間を使用して距離を決定する方法
画像の上部には、パルスを送信し、反射後に戻るまでの時間間隔を測定する最初の方法が表示されています。
画像の中央は2番目の方法を示しています。この方法では、光源の振幅を変調し、反射波の位相シフトを記録できます。
画像の下部は3番目の方法を表しており、50%のデューティサイクルの方形波を送信し、特定の間隔で到着する戻り光の量を記録します。
ミリメートルレベルの高精度ToFカメラ
光と電波はほぼ300,000,000,000mm / sで移動します。これは、波が1 mm移動する場合(さらに3.3 ps戻る場合)に約3.3psに相当します。つまり、部屋にあるすべてのオブジェクトを画像化できるデバイスが必要で、最大1 mmの解像度が必要な場合、タイミング電子機器にはピコ秒の解像度が必要になります。これは、数百GHzのクロック速度に相当します。
これらの周波数で動作する電子回路を設計することは簡単でも経済的でもないため、設計者は、デバイスを消費者のスペースに手頃な価格で提供したい場合、より低い周波数で動作する方法を考え出す必要がありました。
妥当なサブGHz周波数で作業しながらミリメートルレベルの精度を達成するには、2つの一般的な方法があります。
- 正弦波変調波の位相シフトを距離に関連付ける
- 50%のデューティサイクルの方形波の位相シフトと差動電圧を使用して距離を決定する
以下のセクションでは、これら2つの方法について詳しく見ていきます。
振幅変調波の位相シフトによる距離の決定
最大長が15mの小さなオフィスまたは大きなリビングルームの地図を作成しようとしているとします。その長さの適切な動作周波数を決定するには、$$ c =\ lambda \ cdot f $$を使用します。ここで、cは光速です(c =3x10 8 m / s)、λは1波長(λ=15 m)、ƒは周波数です。この例では、ƒ=20 MHzであり、これは比較的扱いやすい周波数です。
それはすべて、明るい光の出力が20MHzの正弦波信号で変調されたときに始まります。光の波は最終的に物体または壁に到達し、反射して方向を逆にします。元の変調された光の調光バージョンが受信機に戻ります。オブジェクトが正確に15メートルの整数倍離れていない限り、位相はある程度シフトします。
位相シフトを使用して、波が移動した距離を計算できます。
位相角を正確に測定できれば、反射物体がセンサー/レシーバーから離れている距離を正確に判断できます。
正弦波の位相角を測定する方法
では、どのようにして正弦波の位相角をすばやく測定しますか?これには、4つの等間隔のポイント(つまり、90°または1 /4λの間隔)で受信信号の振幅を測定することが含まれます。
$$ \ varphi =ArcTan \ left(\ frac {A_1-A_3} {A_2-A_4} \ right)$$
以下、測定値と位相角の関係を説明してみました。 A 1 間の差の比率 およびA 3 とA 2 の違い およびA 4 位相角の接線に等しい。 ArcTanは、実際には2引数のアークタンジェント関数であり、適切な象限をマッピングし、A 2 のタイミングを定義します。 =A4およびA 1 > A 3 またはA 3 > A 1 それぞれ0°または180°として。
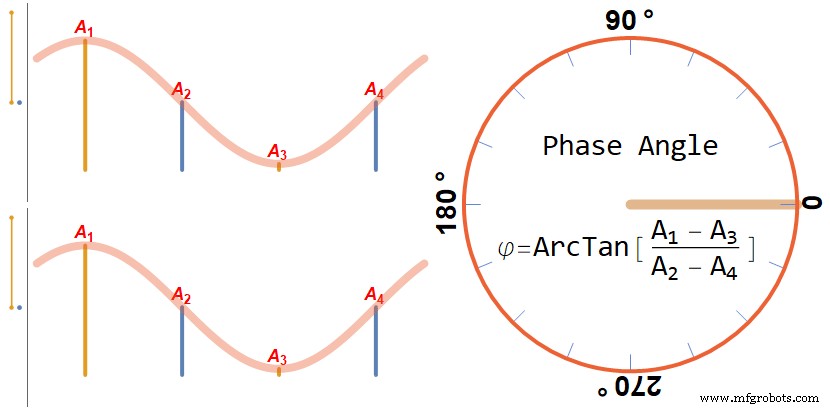
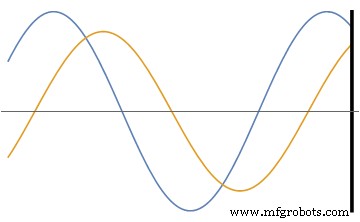
図をクリックすると、変数A 1 の違いを示すより複雑な画像が表示されます。 、A 2 、A 3 、およびA 4 単位円にフィットします。
上の図では、グラフの左端に2本の縦の数直線があり、A 1 を引いた結果を示しています。 およびA 3 (濃い黄色で表されます)およびA 2 およびA 4 (青で表されます)。測定値は、中央の正弦波グラフに縦線で示されています。
このグラフィックは反射を考慮していないことに注意してください(これにより、すべてが効果的に180°シフトします)。
特定の距離での動作周波数の決定
例に戻ると、ターゲットまでの距離は次の式で決定されます。
$$ d =\ frac {c \ cdot \ varphi} {4 \ pi \ cdot f} $$
ここで、cは光速、phi(φ)は位相角(ラジアン)、ƒは変調周波数です。
光子の実際の飛行時間を測定するには、333GHzの電子機器が必要です。この方法では、最大4倍の変調周波数が必要です。この場合は4x20 MHz =80MHzです。これは、リソースの驚異的な削減です。しかし、賢いエンジニアの中には、最大周波数をさらに下げる方法を見つけた人がいることを知って幸せになるでしょう。
充電されたコンデンサの差動電圧測定による位相シフトの決定
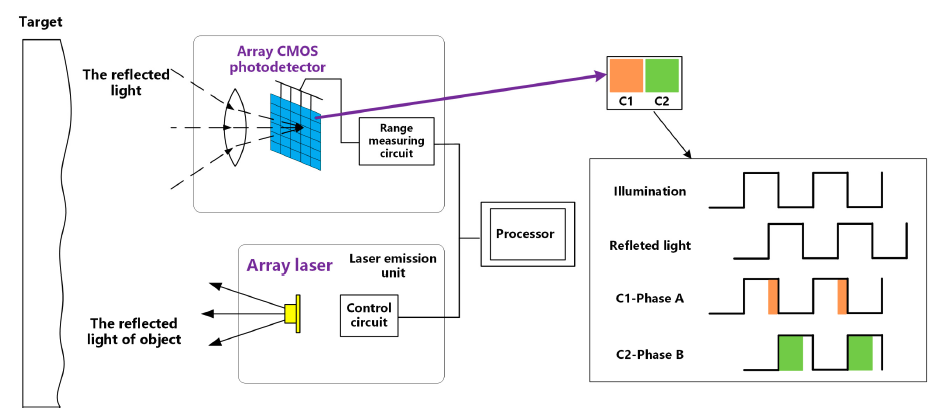
次の測定状況には、ストロボライト光源と、ピクセルごとに2つのコンデンサを備えたCMOSイメージングセンサーが含まれます。
クロックソースは50%のデューティサイクルの方形波を生成し、その方形波は明るいストロボ光源と、各ピクセル内の電荷蓄積コンデンサへの接続を制御します。
このようなシステムの例を以下の画像に示します。
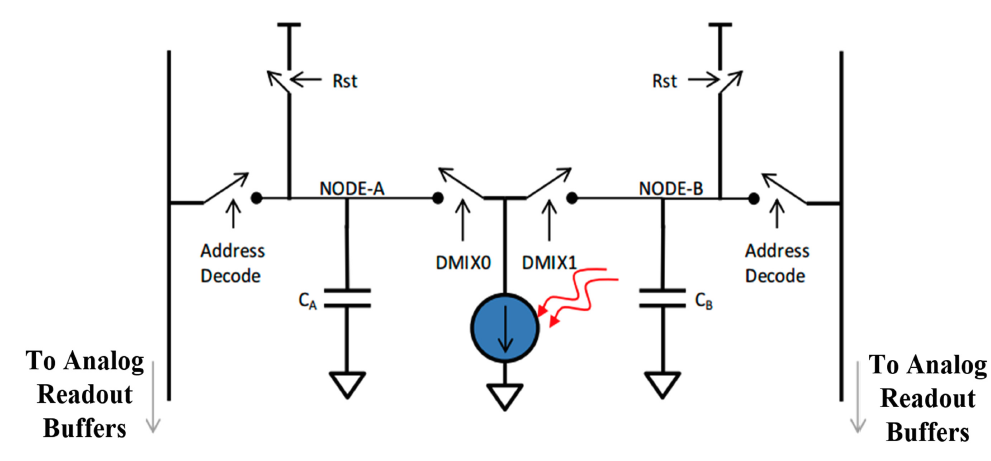
「フォトニックミキサーデバイスソリッドステートアレイLiDARSの高速キャリブレーション方法」の画像これは、着信を記録するために交互に接続された2つの電荷蓄積コンデンサを備えたCMOSピクセルを示しています軽い。
光は光源を離れ、物体で反射し、ピクセルに当たり、コンデンサC A に電荷として記録されます。 またはC B 上に示しました。コンデンサは、同じクロックソースを使用して、照明ソースと同じ周波数でピクセルに交互に接続されます。
この巧妙な配置は、コンデンサの差動電荷が位相オフセットに直接関係することを意味します。そして、位相は波長とターゲットまでの距離によって決まります。
「フォトニックミキサーデバイスソリッドステートアレイLiDARSの高速キャリブレーション方法」からの画像
コンデンサを充填するために必要な数のサイクルで被写体を照らすことができます。距離が一定である限り、充電比率は同じままです
動作中の飛行時間センサー
この方法はどの程度うまく機能しますか?あなたが期待するよりも良い。
AACに提供されるセンサーは、付属のソフトウェアと組み合わせて、最大45fpsを記録する機能を備えています。リフレッシュレートを低くすると、システムはシャツのしわを簡単に画像化できます。

上の画像は、pmdのpico flexxカメラからキャプチャされた各ピクセルの(x、y、z)頂点位置をプロットしています。
深度のみのデータは、それ自体で視覚化することは困難です。そのため、深度画像は写真と組み合わせたり、シーンを簡単に視覚化できるように偽色を使用して表示したりすることがよくあります。
低解像度画像の偽色深度オーバーレイにより、シーンの解釈が容易になります。 pmdのRoyalViewerソフトウェアとCamBoardpico flexx3D開発キットでキャプチャされたgoober作成者の画像。
飛行時間センサーは、巧妙な物理学と工学を組み合わせた場合の環境の3Dマップの作成など、さまざまなアプリケーションで利用できます。
仕事で3Dカメラを使ったことはありますか?飛行時間センサーを使用する際の設計上の制約について教えてください。以下のコメントであなたの経験を共有してください。
産業技術