


555タイマーPWMDCモーター速度コントローラー
このチュートリアルでは、555タイマーICを使用してPWMDCモーター速度コントローラーを作成する方法を学習します。 555タイマーPWMジェネレーター回路がどのように機能するか、DCモーターの速度を制御するためにそれを使用する方法、およびそのためのカスタムPCBを作成する方法を詳しく見ていきます。
次のビデオを見るか、以下のチュートリアルを読むことができます。
モーターの入力電圧を制御することにより、DCモーターの速度を制御できます。そのために、PWMまたはパルス幅変調を使用できます。
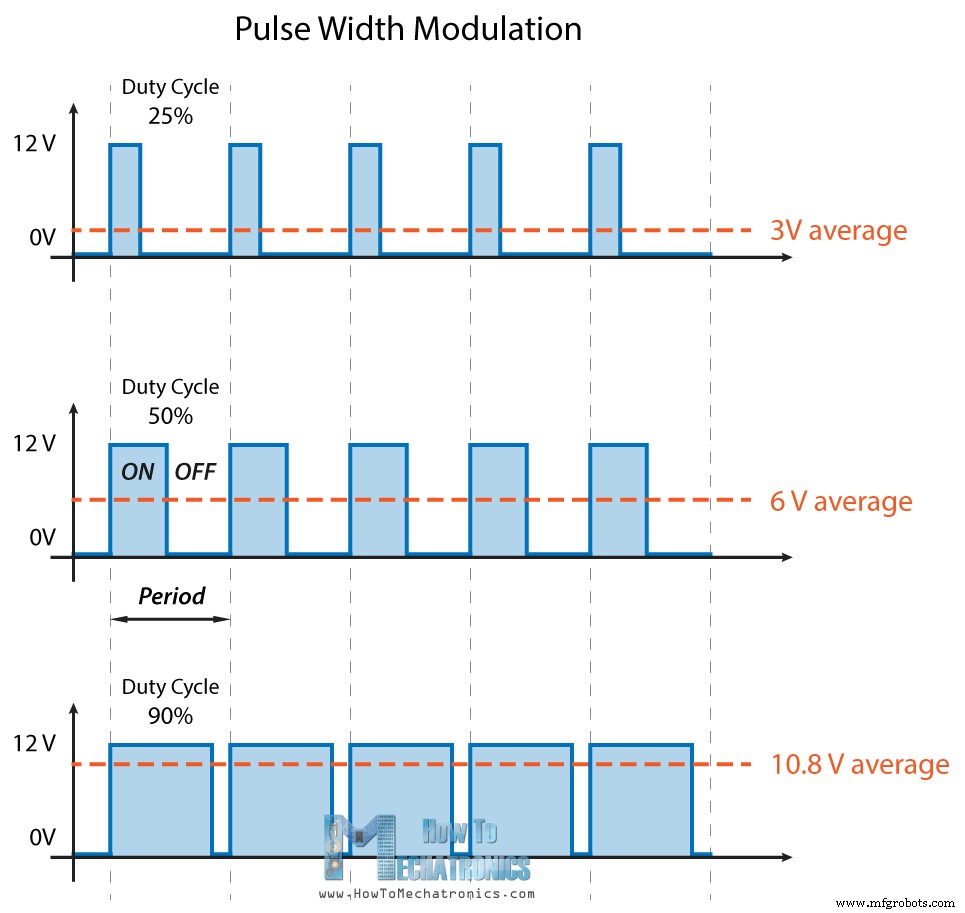
PWMは、電子機器に高速で送られる電源をオン/オフすることで可変電圧を生成できる方法です。平均電圧は、信号のデューティサイクル、または信号がオンになっている時間と信号がオフになっている時間の長さによって異なります。
555タイマーは、非安定モードでセットアップされたときにPWM信号を生成することができます。 555タイマーに慣れていない場合は、以前のチュートリアルで、中身と555タイマーICの仕組みについて詳しく説明しました。
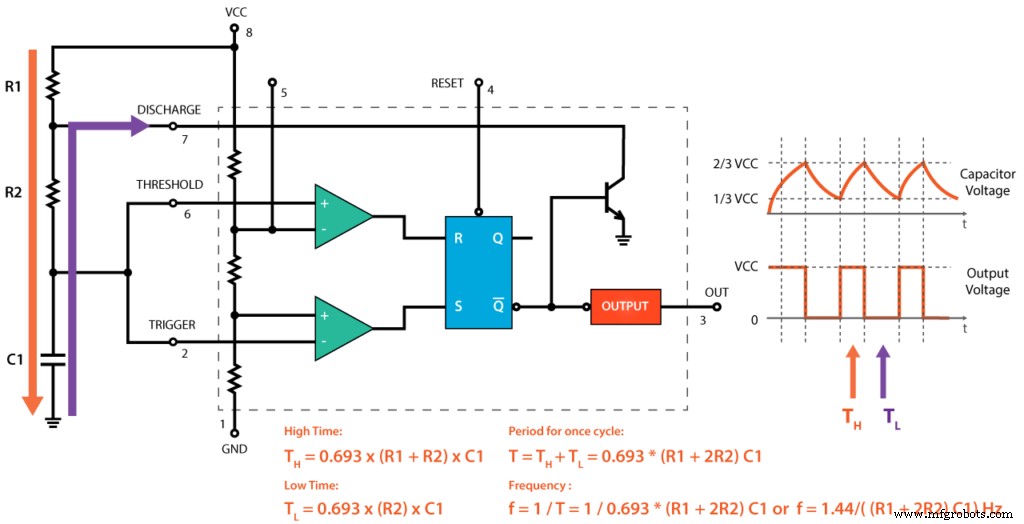
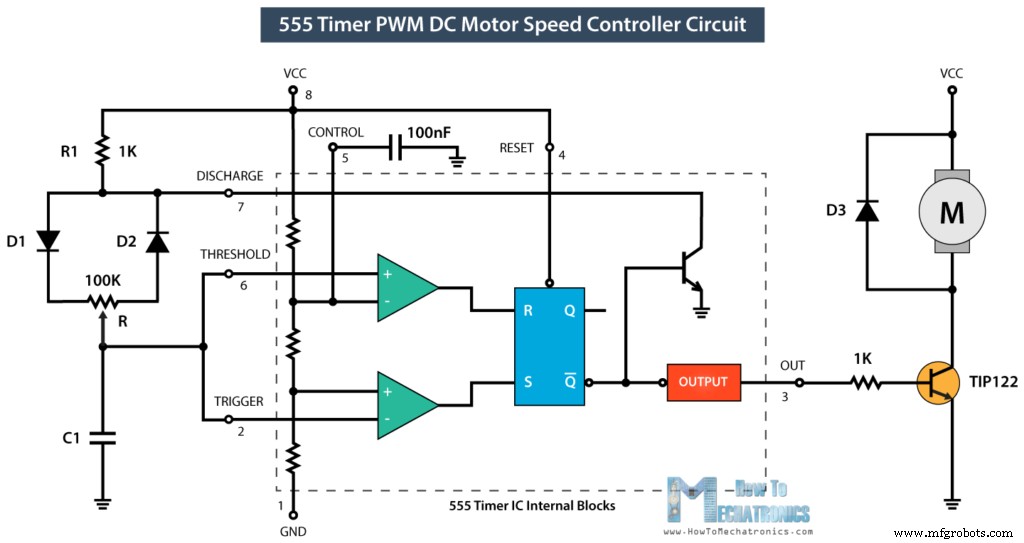
これが非安定モードで動作する555タイマーの基本回路であり、コンデンサC1が抵抗R1とR2を介して充電しているときに出力がHIGHであることがわかります。
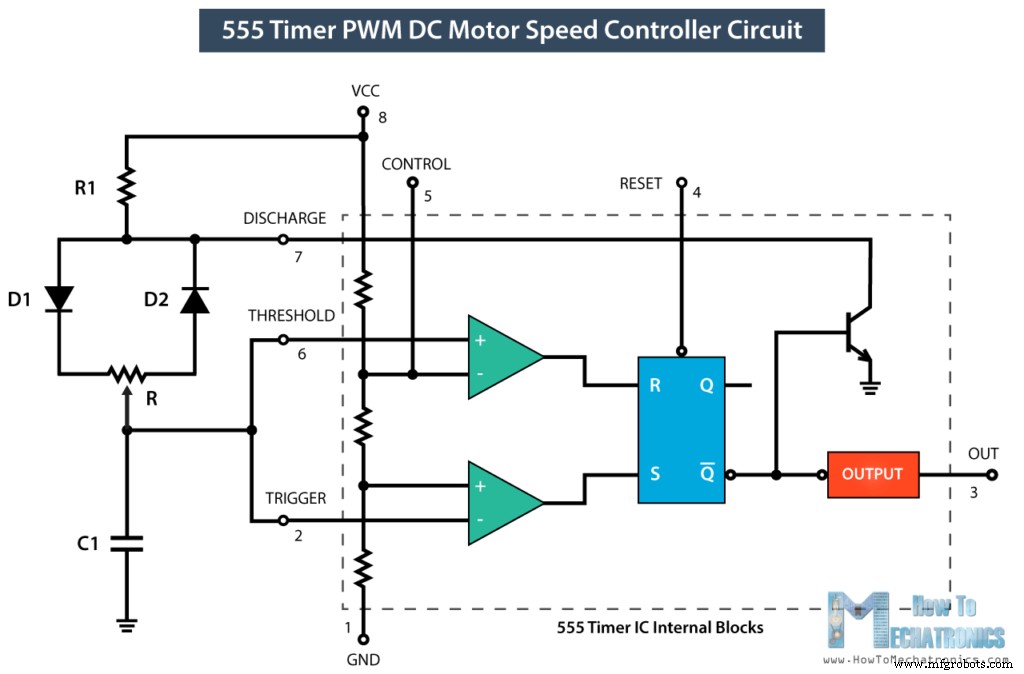
一方、コンデンサC1が放電しているとき、ICの出力はLOWですが、抵抗R2を介してのみです。したがって、これら3つのコンポーネントのいずれかの値を変更すると、オン時間とオフ時間が異なるか、方形波出力信号のデューティサイクルが異なることに気付くことができます。これを行う簡単で瞬時の方法は、R2抵抗をポテンショメータに交換し、さらに回路に2つのダイオードを追加することです。
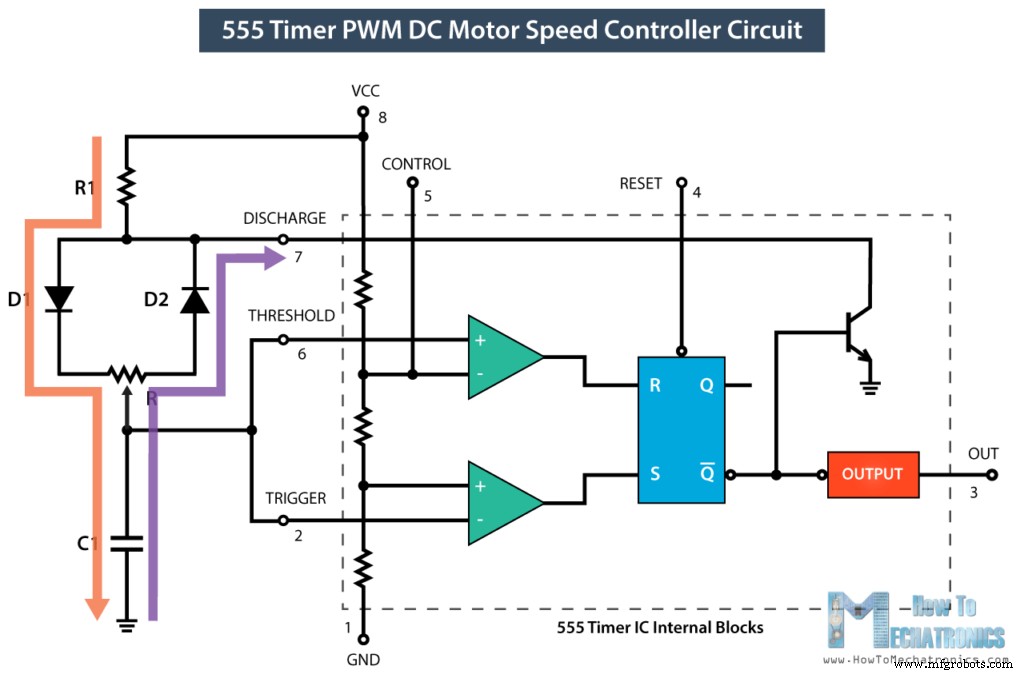
この構成では、オン時間は抵抗R1、ポテンショメータの左側とコンデンサC1に依存し、オフ時間はコンデンサC1とポテンショメータの右側に依存します。また、この構成では、1サイクルの周期、つまり周波数は常に同じであることがわかります。これは、充電と放電の間の総抵抗が同じままであるためです。
通常、R1抵抗はポテンショメータの抵抗よりもはるかに小さく、たとえば、ポテンショメータの100Kと比較して1Kです。このようにして、回路の充電抵抗と放電抵抗を99%制御できます。 555タイマーの制御ピンは使用されていませんが、その端子からの外部ノイズを除去するために100nFのコンデンサに接続されています。リセット、ピン番号4はアクティブローであるため、出力の不要なリセットを防ぐためにVCCに接続されています。
555タイマーの出力は、負荷に200mAの電流をシンクまたはソースすることができます。したがって、制御するモーターがこの定格を超える場合は、モーターを駆動するためにトランジスタまたはMOSFETを使用する必要があります。この例では、最大5Aの電流を処理できる(TIP122)ダーリントントランジスタを使用しました。
ICの出力は抵抗を介してトランジスタのベースに接続する必要があり、私の場合は1kの抵抗を使用しました。モーターによって発生する電圧スパイクを防ぐために、モーターと並列に接続されたフライバックダイオードを使用する必要があります。
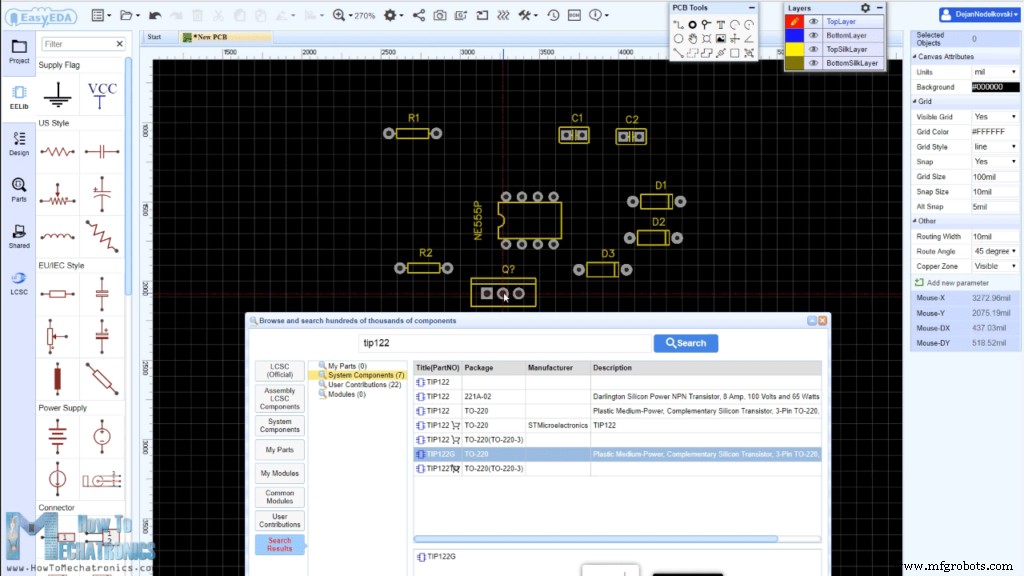
これで、この回路のカスタムPCBを設計できます。そのために、EasyEDAの無料オンラインソフトウェアを使用します。ここでは、コンポーネントを検索して空白のキャンバスに配置することから始めます。ライブラリには数十万のコンポーネントがあるため、このPWMDCモーター速度コントローラー回路に必要なすべてのコンポーネントを見つけるのに問題はありませんでした。
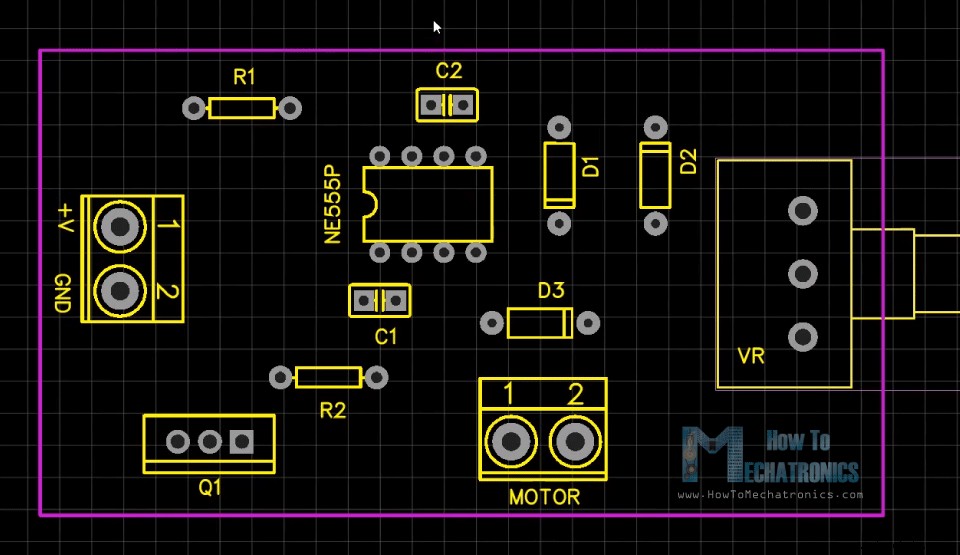
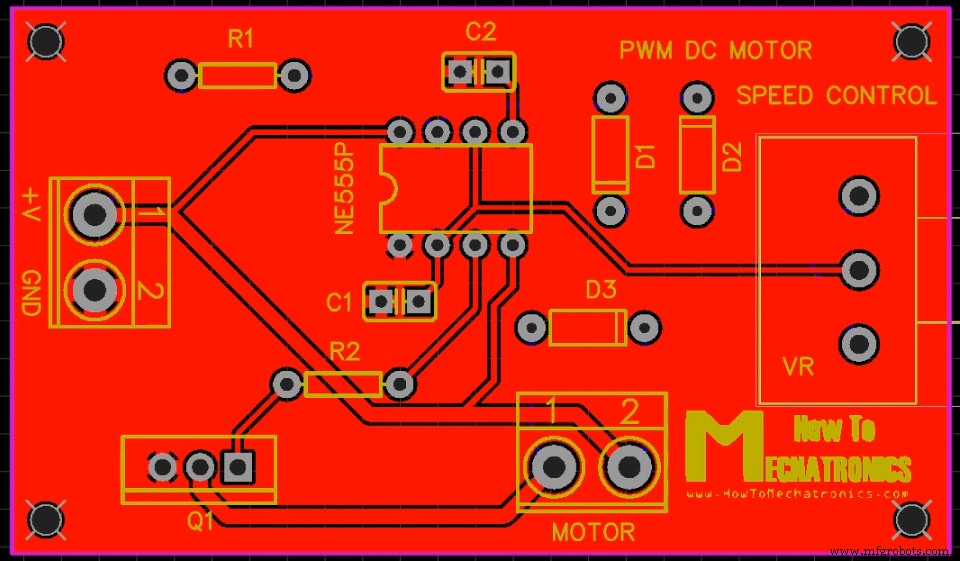
コンポーネントを挿入した後、ボードのアウトラインを作成し、コンポーネントの配置を開始する必要があります。 2つのコンデンサは555タイマーのできるだけ近くに配置する必要がありますが、他のコンポーネントは必要な場所に配置できますが、回路図によると論理的な配置になっています。
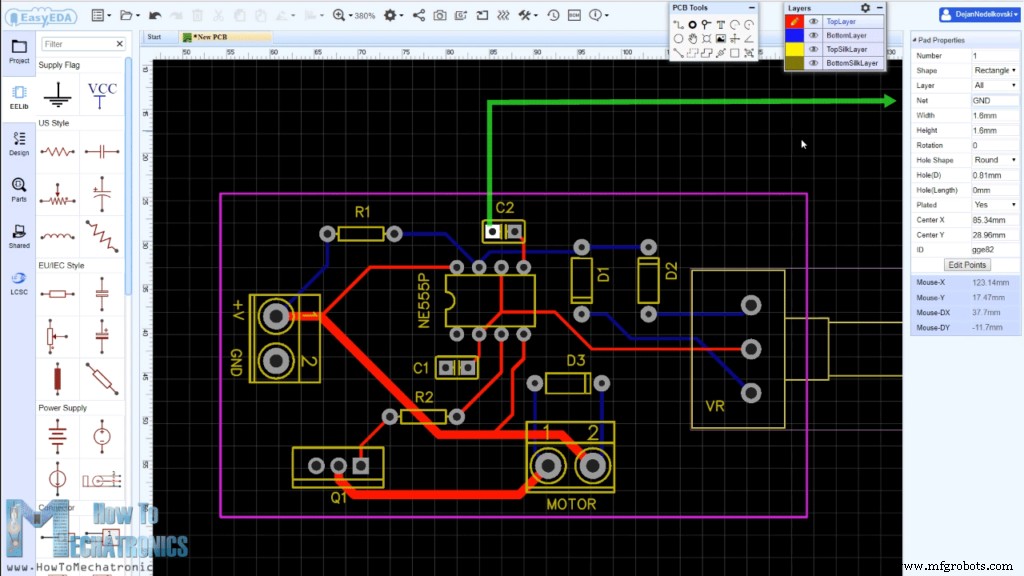
追跡ツールを使用して、すべてのコンポーネントを接続する必要があります。追跡ツールは非常に直感的で操作が簡単です。交差を避け、トラックを短くするために、最上層と最下層の両方を使用できます。
グラウンドに接続する必要のあるコンポーネントのパッドは、[パッドのプロパティ]タブでグラウンドに設定されます。パッドを選択すると、[ネット]ラベルにGNDと入力する必要があります。
Silkレイヤーを使用して、ボードにテキストを追加できます。また、画像ファイルを挿入できるので、ウェブサイトのロゴに画像を追加してボードに印刷します。最後に、銅領域ツールを使用して、PCBの接地領域を作成する必要があります。
このプロジェクトのEasyEDAプロジェクトファイルはここにあります。
設計が完了したら、「ガーバー出力」ボタンをクリックしてプロジェクトを保存するだけで、PCBの製造に使用されるガーバーファイルをダウンロードできるようになります。 EasyEDAのPCB製造サービスであるJLCPCBからPCBを注文できます。また、このビデオのスポンサーでもあります。
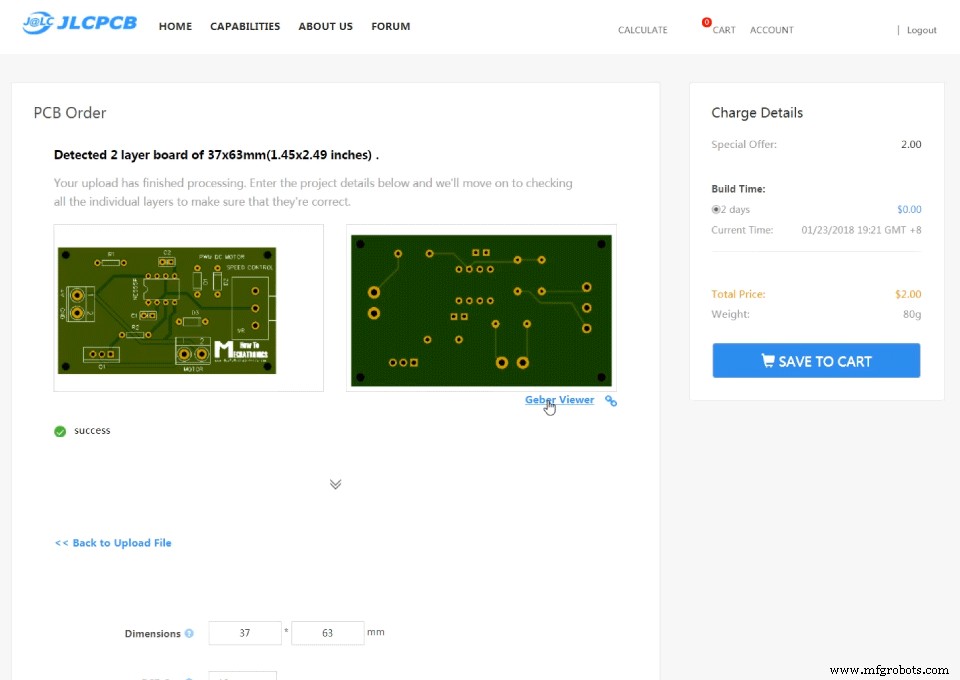
ここでは、ダウンロードしたガーバーファイルのzipファイルをドラッグアンドドロップするだけです。アップロードした後、GerberビューアでPCBをもう一度確認できます。すべてが順調であれば、最大10個のPCBを選択して、わずか2ドルで入手できます。
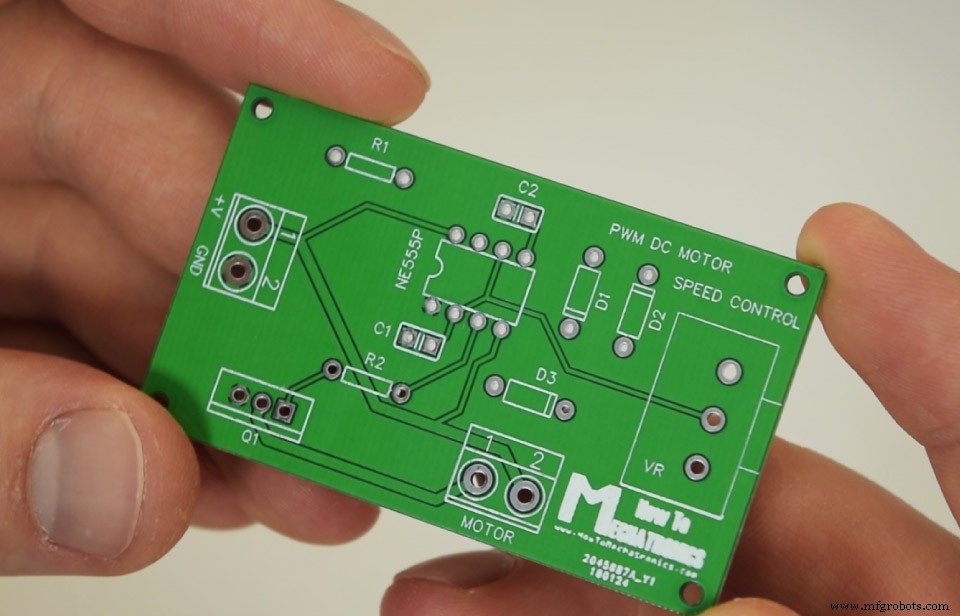
それでも、1週間後にPCBが到着したので、独自のPCBデザインを製造することは非常に満足のいくものであることを認めなければなりません。 PCBの品質は素晴らしく、すべてが設計とまったく同じです。
では、PCBへのコンポーネントの挿入に移りましょう。
この例に必要なコンポーネントは、以下のリンクから入手できます。
最初に、小さいコンポーネント、抵抗、ダイオード、およびコンデンサを挿入しました。
はんだ付けのためにボードを裏返したときに、リードが所定の位置に留まるように、リードを反対側に曲げました。大きなコンポーネントについては、ボードを裏返すときにマスキングテープを使用して所定の位置に保持しました。
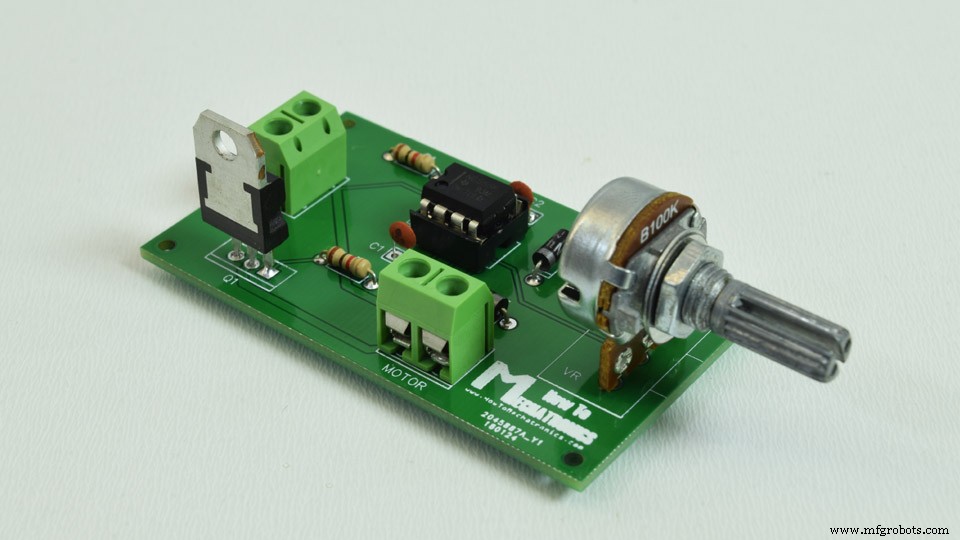
ボードの最終的な外観は次のとおりです。残っているのは、DCモーターとそれに適した電源を接続することです。
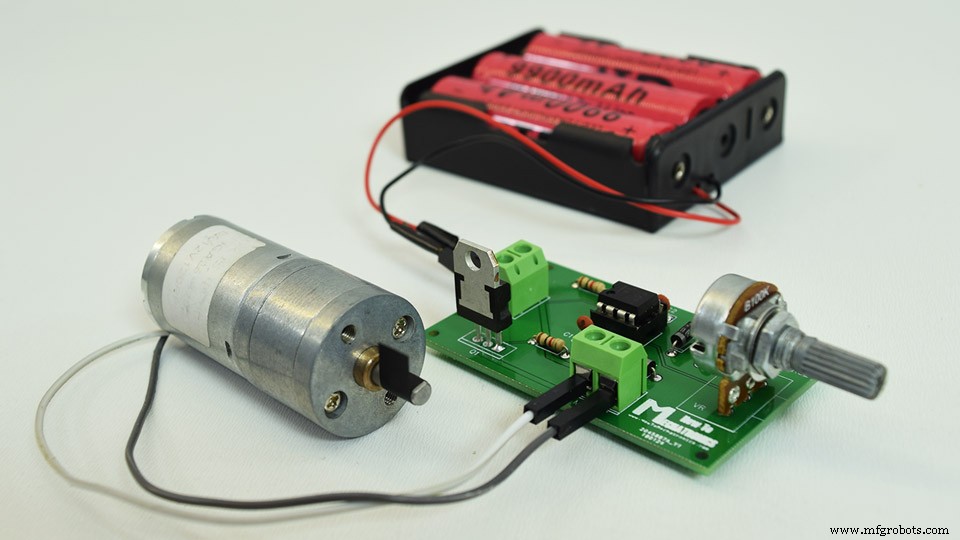
直列に接続された約12Vの3.7Vリチウムイオン電池を使用して電力を供給した12V高トルクDCモーターを使用しました。これで、ポテンショメータを使用して、DCモーターの速度、または555タイマーICによって生成されるPWM信号を制御できます。
このチュートリアルを楽しんで、何か新しいことを学んだことを願っています。以下のコメントセクションでお気軽に質問してください。
PWMDCモーター速度制御
555タイマーPWMジェネレーター回路
PWMDCモーター速度コントローラー用のPCBの設計
PWMDCモーター速度コントローラーPCBの組み立て
産業技術