


ブラシレスモーターとESCのしくみ
このチュートリアルでは、ブラシレスモーターとESCがどのように機能するかを学びます。この記事は、ブラシレスDCモーターとESC(Electronic Speed Controller)の動作原理を学ぶ次のビデオの最初の部分であり、2番目の部分ではArduinoを使用してBLDCモーターを制御する方法を学びます。
次のビデオを見るか、以下のチュートリアルを読むことができます。
BLDCモーターは、固定子と回転子の2つの主要部分で構成されています。この図では、回転子は2極の永久磁石であり、固定子は下の図に示すように配置されたコイルで構成されています。
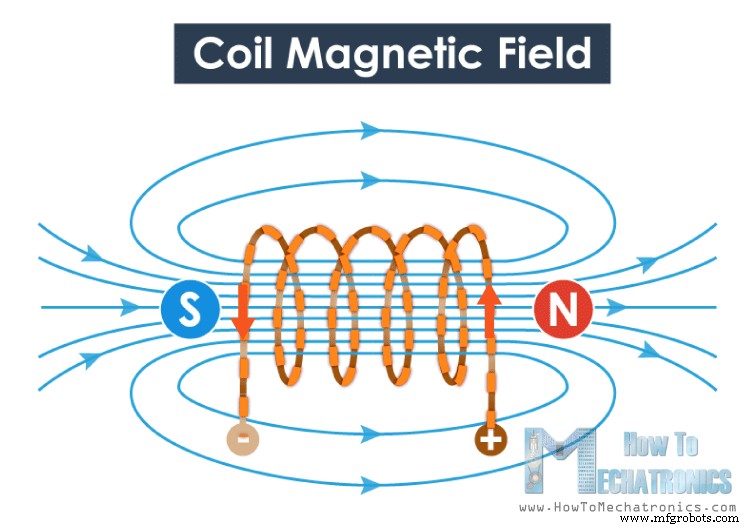
コイルに電流を流すと磁場が発生し、磁力線や極は電流の方向に依存することは誰もが知っています。
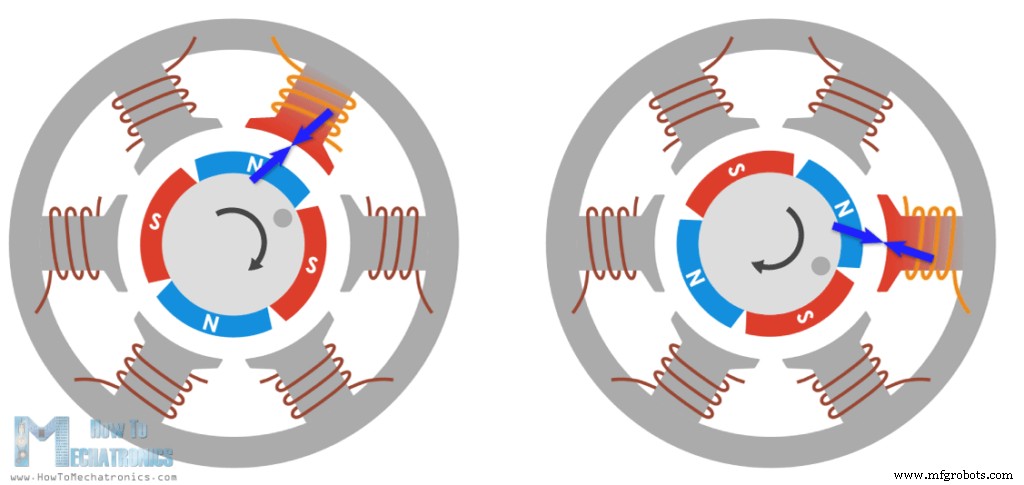
したがって、適切な電流を流すと、コイルは磁場を生成し、ローターの永久磁石を引き付けます。ここで、各コイルを次々にアクティブにすると、永久磁石と電磁石の間の力の相互作用のために、ローターは回転し続けます。
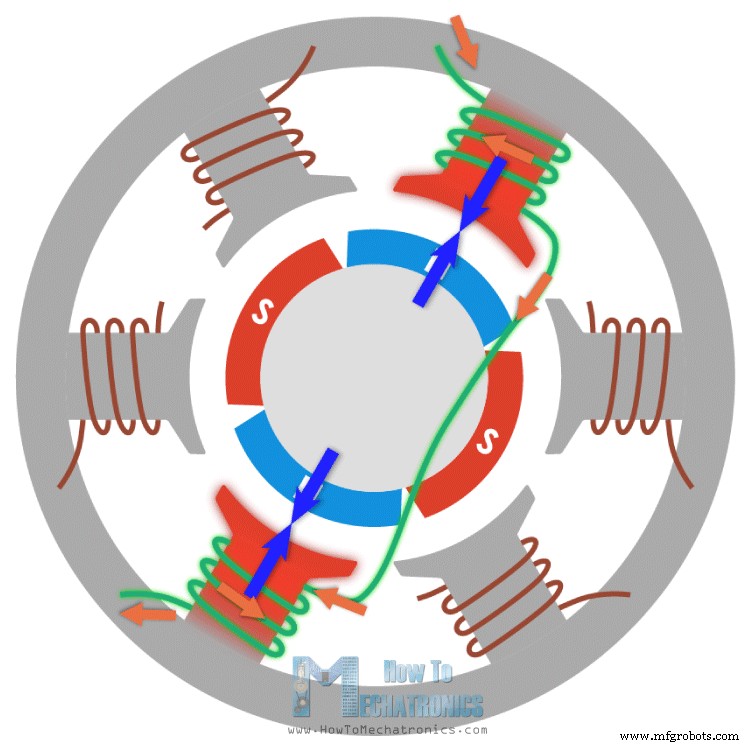
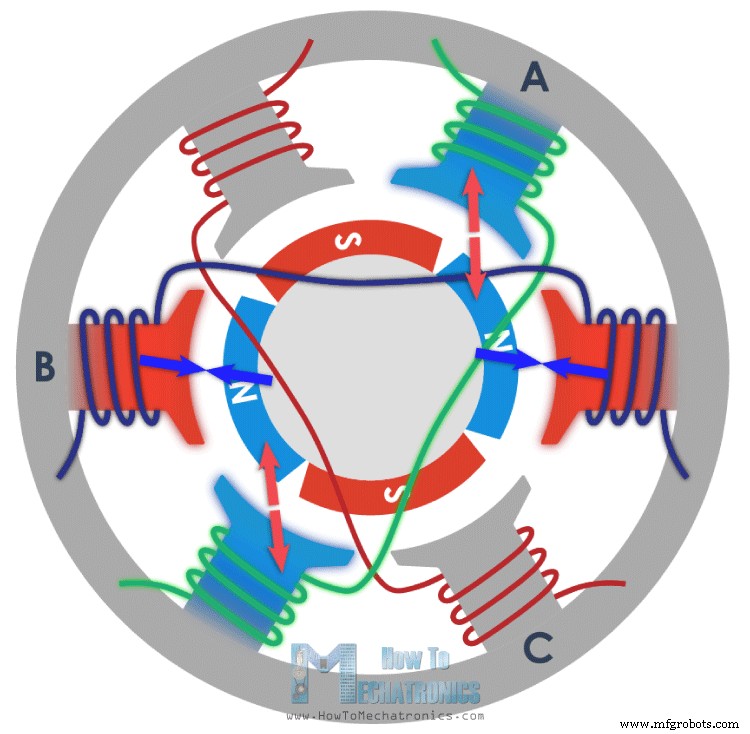
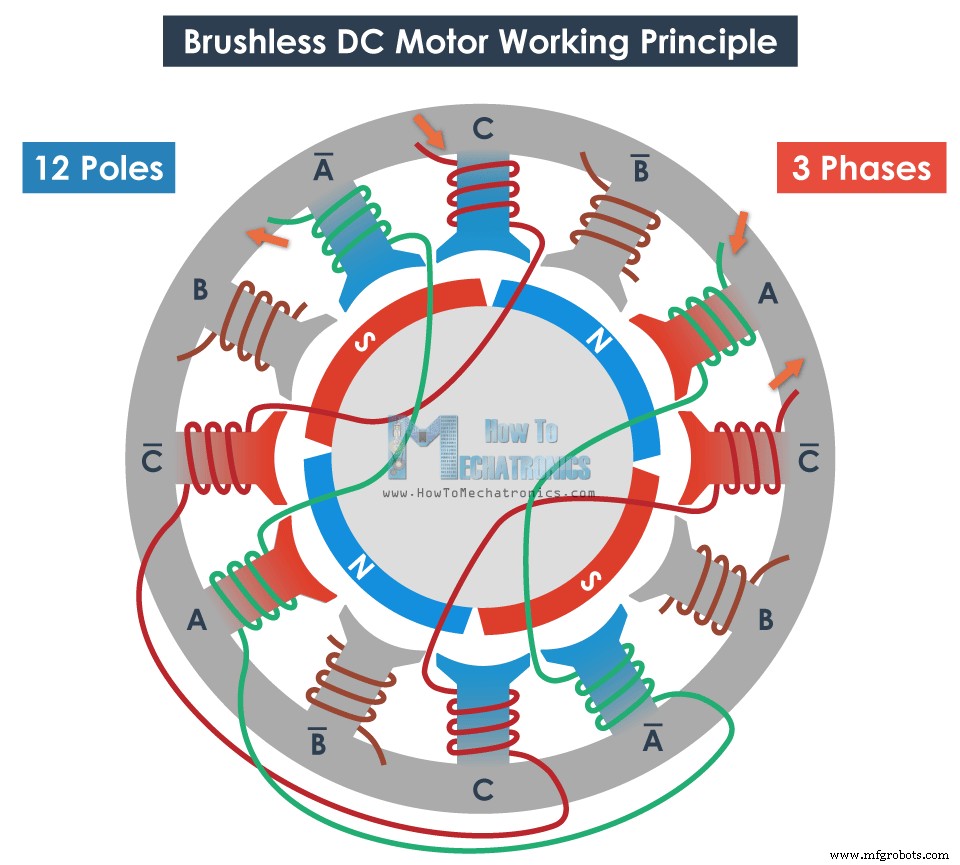
モーターの効率を上げるために、2つの反対側のコイルを1つのコイルとして巻いて、回転子の極と反対の極を生成することができます。これにより、2倍の引力が得られます。
この構成では、3つのコイルまたは相だけで固定子に6つの極を生成できます。 2つのコイルに同時に通電することで、さらに効率を上げることができます。このようにして、一方のコイルが引き付けられ、もう一方のコイルがローターをはじきます。
ローターが完全な360度のサイクルを行うには、6つのステップまたは間隔が必要です。
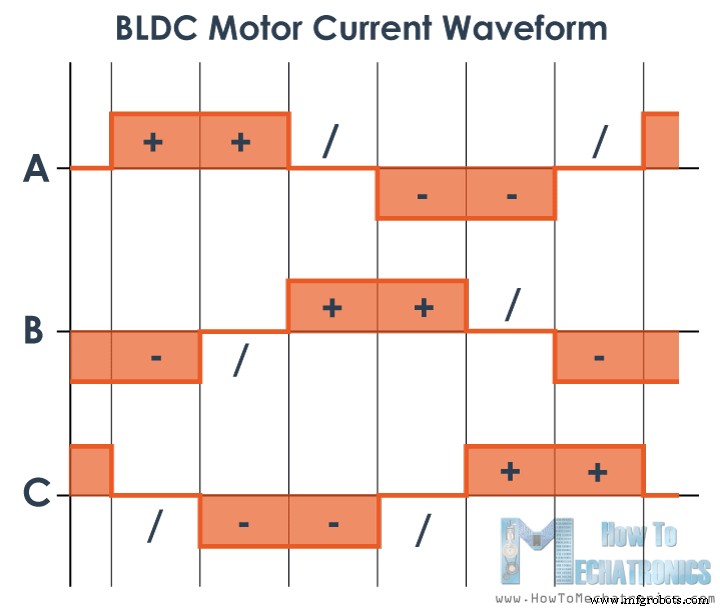
電流波形を見ると、各間隔に正の電流が流れる1つの相、負の電流が流れる1つの相があり、3番目の相がオフになっていることがわかります。これにより、3つのフェーズのそれぞれの自由端点を相互に接続できるため、それらの間で電流を共有したり、単一の電流を使用して2つのフェーズに同時に通電したりできるという考えが得られます。
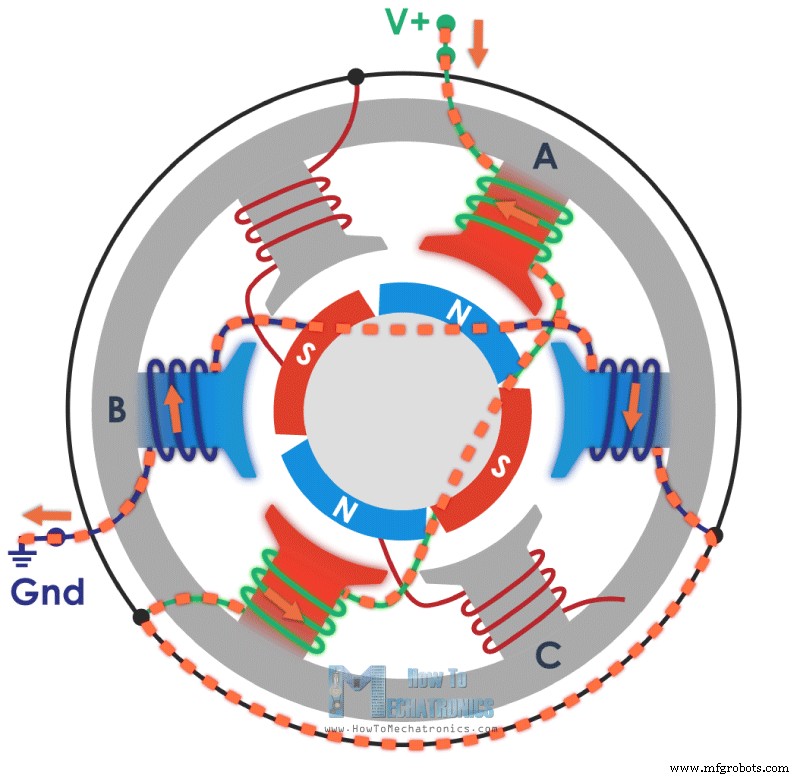
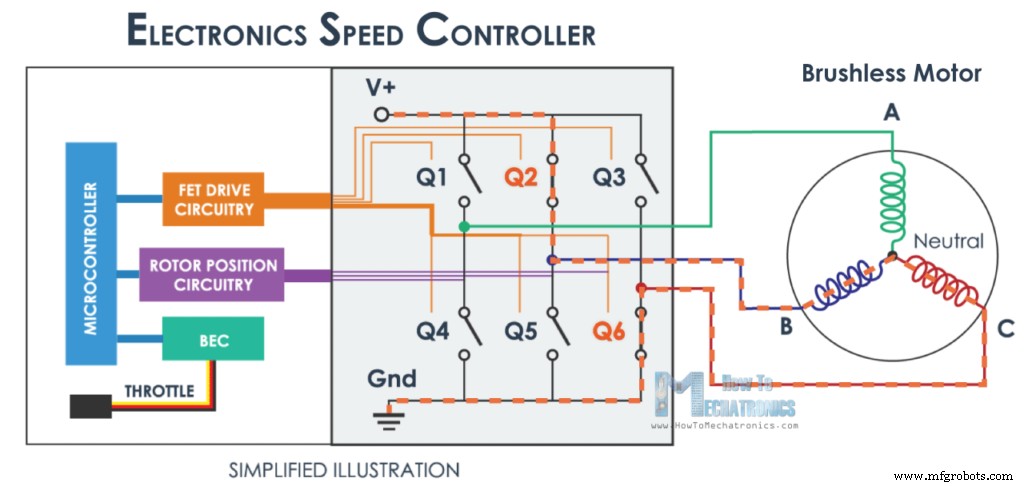
これが例です。 A相をHighに引き上げるか、MOSFETなどのスイッチを使用して正のDC電圧に接続し、反対側でB相をグランドに接続すると、電流はVCCからフェーズA、中性点およびフェーズB、アースへ。したがって、1つの電流を流すだけで、ローターを動かす4つの異なる極を生成しました。
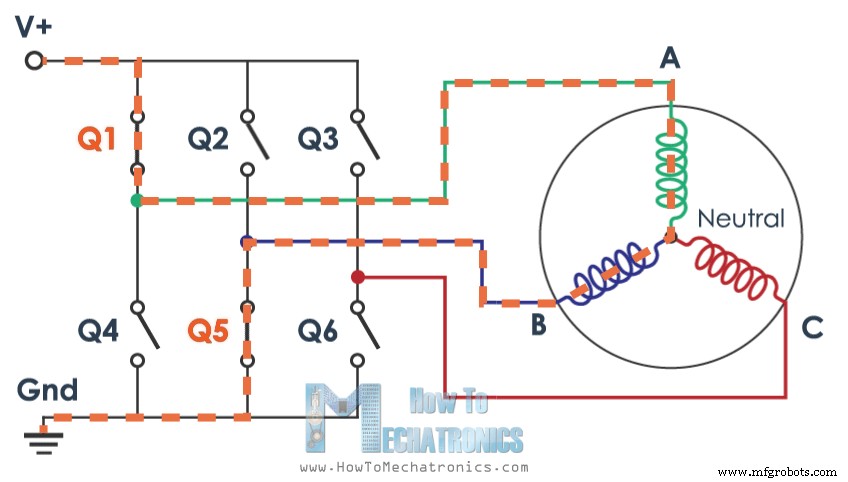
この構成では、実際にはモーターフェーズのスター接続があり、ニュートラルポイントが内部で接続され、フェーズの他の3つの端がモーターから出ています。そのため、ブラシレスモーターには3本のワイヤーが出ています。
したがって、ローターが完全なサイクルを実行するには、6つの間隔のそれぞれで正しい2つのMOSFETをアクティブにする必要があります。これが、実際のESCのすべてです。
ESCまたは電子速度コントローラーは、適切なMOSFETをアクティブにして回転磁界を生成し、モーターが回転するようにすることで、ブラシレスモーターの動きまたは速度を制御します。周波数が高いほど、またはESCが6つの間隔を通過する速度が速いほど、モーターの速度は速くなります。
ただし、ここで重要な質問があります。それが、どのフェーズをいつアクティブ化するかをどのように知るかです。答えは、ローターの位置を知る必要があり、ローターの位置を決定するために使用される2つの一般的な方法があるということです。
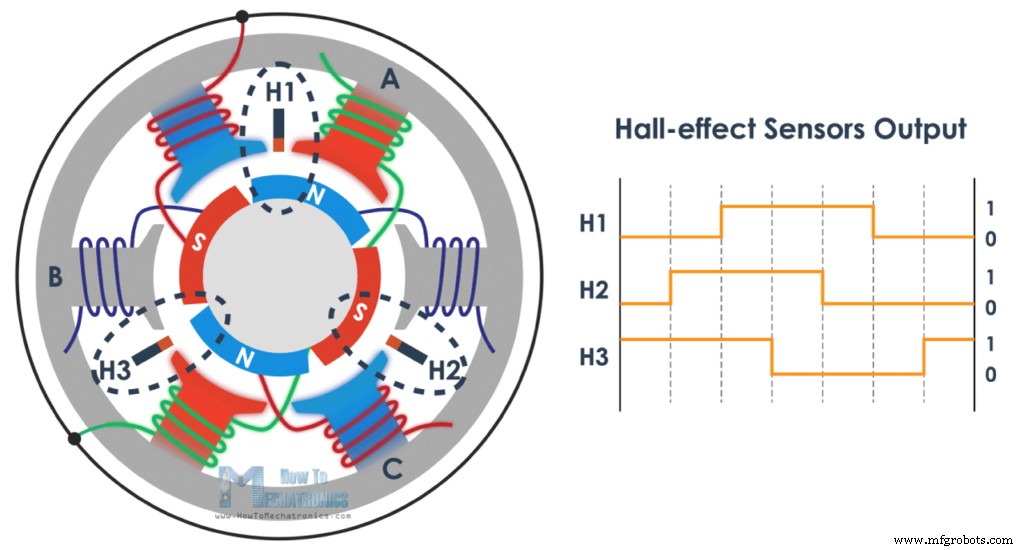
最初の一般的な方法は、固定子に埋め込まれ、互いに120度または60度に均等に配置されたホール効果センサーを使用することです。
回転子の永久磁石が回転すると、ホール効果センサーが磁場を感知し、一方の磁極に対して「高」の論理、または反対の極に対して「低」の論理を生成します。この情報によると、ESCは次の転流シーケンスまたは間隔をいつアクティブにするかを知っています。
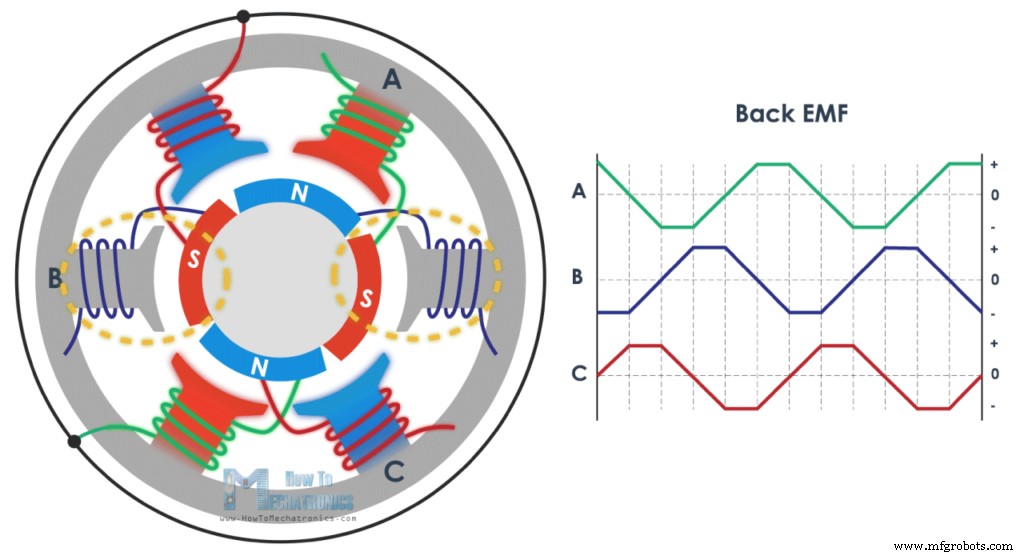
ローターの位置を決定するために使用される2番目の一般的な方法は、逆起電力または逆起電力を検出することです。逆起電力は、磁場を生成する正反対のプロセスの結果として発生するか、移動または変化する磁場がコイルを通過するときにコイルに電流を誘導します。
したがって、ローターの移動磁場がフリーコイル、またはアクティブでないコイルを通過すると、コイルに電流が流れ、その結果、そのコイルで電圧降下が発生します。 ESCは、発生したこれらの電圧降下をキャプチャし、それらに基づいて、次の間隔がいつ発生するかを予測または計算します。
これがブラシレスDCモーターとESCの基本的な動作原理であり、回転子と固定子の両方の極数を増やしても同じです。まだ3相モーターがあり、完全なサイクルを完了するために間隔の数だけが増加します。
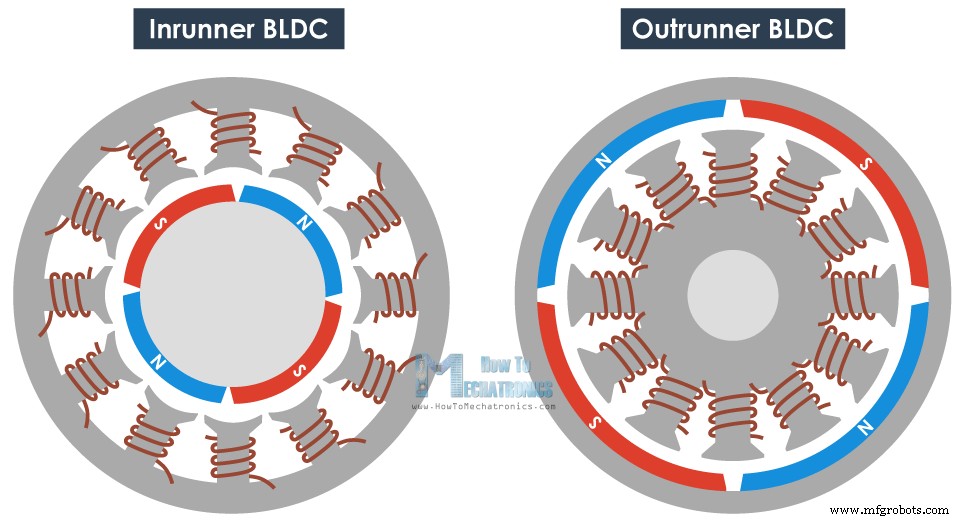
ここで、BLDCモーターはインランナーまたはアウトランナーになる可能性があることにも言及できます。インランナーブラシレスモーターは電磁石の内側に永久磁石を持っており、逆に、アウトランナーモーターは電磁石の外側に永久磁石を持っています。繰り返しになりますが、それらは同じ動作原理を使用しており、それぞれに独自の長所または短所があります。
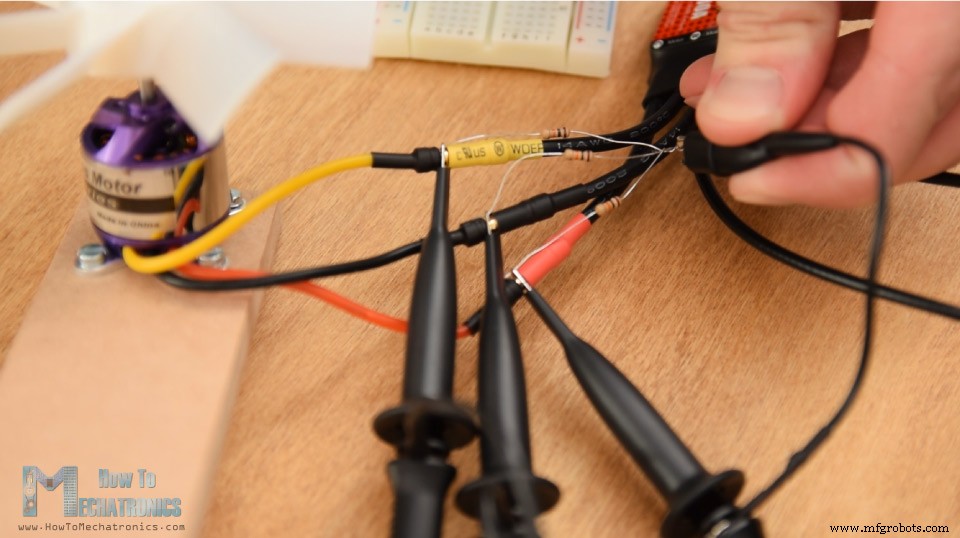
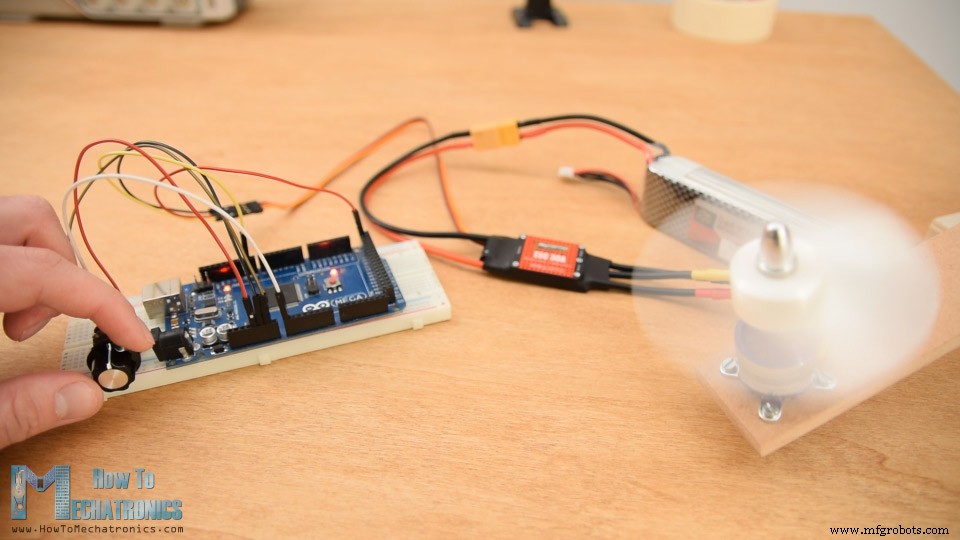
さて、これで十分な理論です。では、上記で説明したことを実際に示して見てみましょう。そのために、ブラシレスモーターの3つのフェーズをオシロスコープに接続します。 1つのポイントに3つの抵抗を接続して仮想ニュートラルポイントを作成し、反対側でそれらをBLDCモーターの3つのフェーズに接続しました。
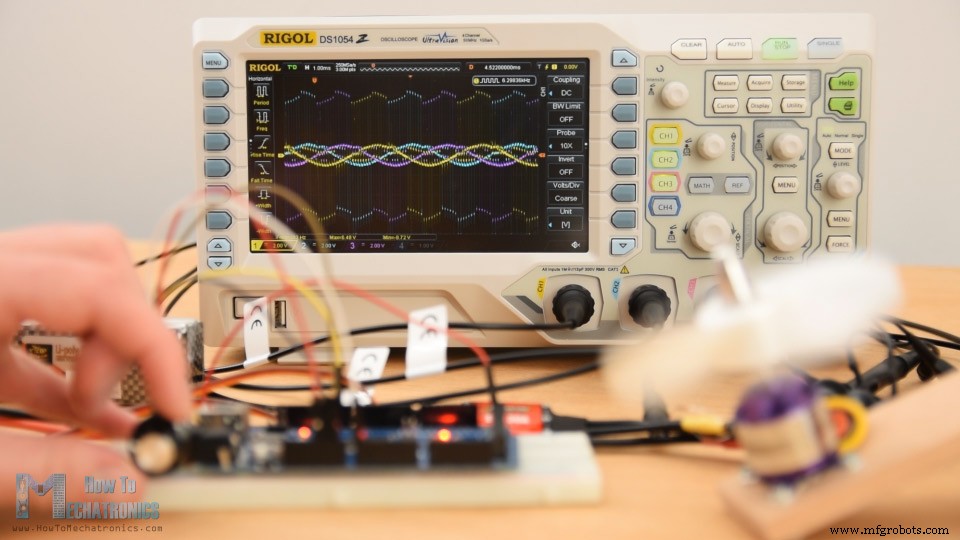
ここで最初に気付くのは、3つの正弦波です。これらの正弦波は、実際には、アクティブでないフェーズで生成される逆EFMです。
モーターのRPMを変更すると、正弦波の周波数と振幅が変化することがわかります。 RPMが高いほど、逆起電力正弦波の周波数と振幅が高くなります。ただし、モーターを駆動するのは実際にはこれらのピークであり、変化する磁場を生成するアクティブなフェーズです。
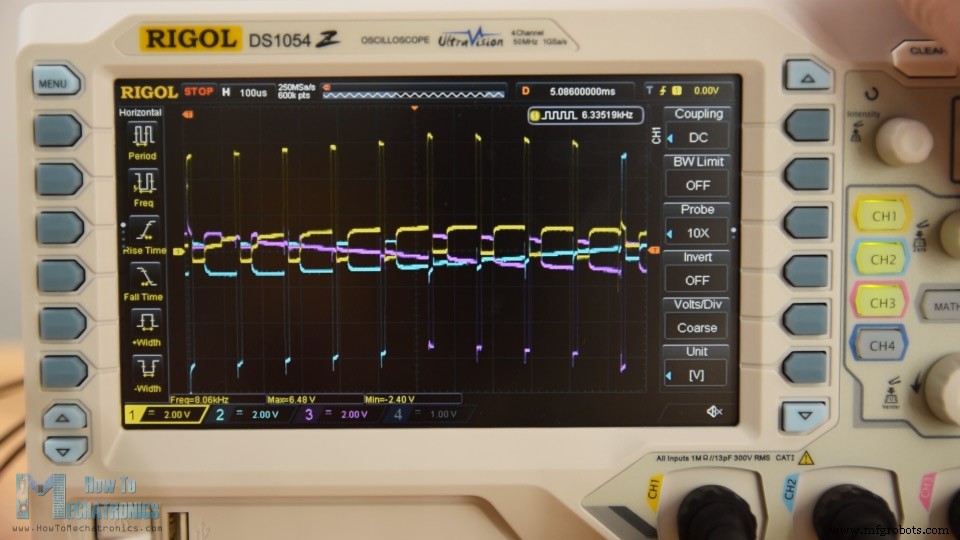
各間隔で、2つのアクティブフェーズと1つの非アクティブフェーズがあることがわかります。たとえば、ここではフェーズAとBがアクティブで、フェーズCは非アクティブです。次に、フェーズAとCがアクティブになり、フェーズBが非アクティブになります。
ここで、このオシロスコープを提供してくれたBanggood.comに一言お願いします。これはRigolDS1054Zであり、その価格帯で最高のエントリーレベルのオシロスコープの1つです。 4つの入力チャネル、50MHzの帯域幅、100MHzにハッキング可能、1GSa / sのサンプリングレート、24Mptsの比較的大きなメモリ深度を備えています。
ディスプレイは7インチで、とても素敵で明るいです。さまざまな数学関数、ローパスおよびハイパスフィルター、SPIおよびI2Cデコードなどを備えています。繰り返しになりますが、Banggood.comに感謝します。また、このオシロスコープをストアで確認してください。
それにもかかわらず、それがブラシレスモーターの基本的な動作原理です。より実際の実例が必要で、Arduinoを使用してブラシレスモーターを制御する方法を学ぶ場合は、このチュートリアルのパート2を確認する必要があります。
このチュートリアルを楽しんで、何か新しいことを学んだことを願っています。以下のコメントセクションでお気軽に質問してください。Arduinoプロジェクトのコレクションを確認することを忘れないでください。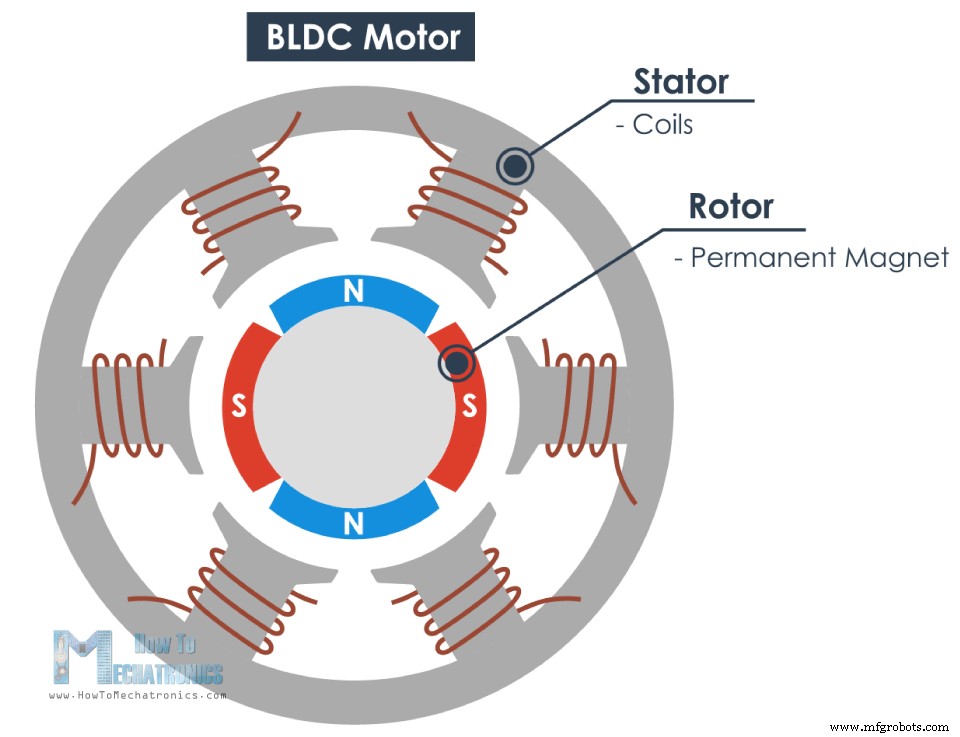
ESCのしくみ(電子速度コントローラー)

産業技術