


SRF04を使用した全自動水位コントローラー
SRF04、L293D、PIC16F84Aを使用した全自動水位コントローラー
自動水位コントローラーの紹介
水タンク内の水位の監視と制御 は、ほとんど多くの住宅および商業地域で最も重要な仕事の1つです。ほとんどの場合、特に住宅では、自動手段が利用できないため、タンク内の水位を頻繁に監視するのは面倒で不便になります。実際、水が不足している場所では、水のオーバーフローはかなりの費用がかかります。
上記の問題に対する唯一の解決策は、水位を自動的に監視および制御する方法を用意することです。距離センサーの使用、電流プローブの使用、超音波レンジャーの使用など、多くの手法がありますが、ここでは超音波レンジャーの使用に焦点を当てます。

- 関連プロジェクト:雨警報回路–雪、水、雨の検出器プロジェクト
水位コントローラーのシステム概要
システムは、タンクの上部に配置された超音波測距センサーで構成されており、トリガーされると超音波信号を送信します。タンク内に存在する水は信号に反射します。センサーはこの信号を受信し、これら2つの信号の間にかかる時間は、信号が移動した距離、つまり上からの水位についての推定値を示します。
ここでは、マイクロコントローラーを使用してトリガー信号を超音波レンジャーに送信します。エコーが受信されると、2つのパルス間のタイムラグが計算され、これは水位に正比例します。タイムラグはタイマーを使用して計算されます。タイマーのカウントパルスの数は、信号が移動した距離または水位を示します。
ここではレンジャーがタンクの上部に配置されているため、タンクの上部からの水のレベルを考慮して水の流れを制御します。たとえば、測定範囲が0〜1 cmであることが判明した場合、タンクはオーバーフローし、マイクロコントローラーは制御信号を送信してモーターを逆方向に回転させ、余分な水を取り除きます。 ‘
範囲が2〜5 cmの場合、タンクは満杯であり、マイクロコントローラーは制御信号を送信してモーターをオフにします。範囲が5cmを超えると、タンクはほとんど空になり、マイクロコントローラーは制御信号を送信してモーターを順方向に回転させます。
自動水位コントローラーの回路図
画像をクリックすると拡大します
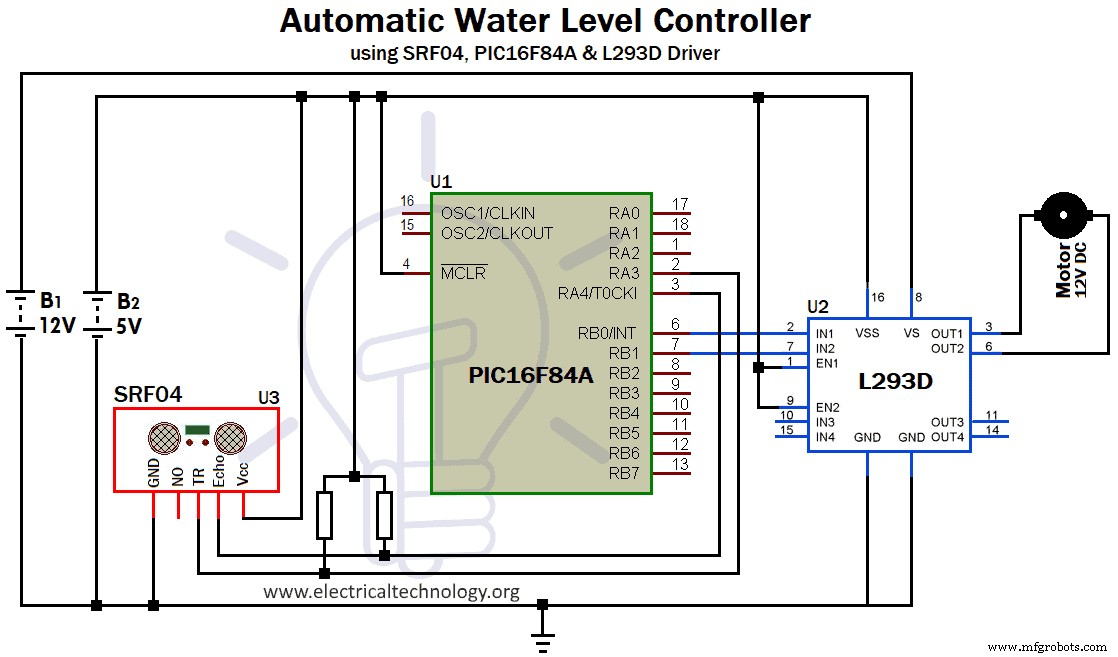
図1:水位コントローラー
パーツの説明
回路の設計には次のコンポーネントが使用されます。
- 超音波距離計SRF04
- PICマイクロコントローラーPIC16F84A
- モータードライバーL293D
- DCモーター
- 2つの1K抵抗器
各コンポーネントについて簡単に説明します
超音波距離計SRF04 :
SRF04は、障害物を簡単に検出するために多くのロボットアプリケーションで使用される高品質の超音波レンジャーです。トリガーするには10マイクロ秒の信号が必要です。 
図2:SRF04超音波距離計
トリガーされると、40 KHzの周波数で8パルスの超音波を送信し、同時にエコーラインをHIGHに上げます。反射信号またはエコーを受信すると、エコーラインをLOWに下げます。
したがって、エコーパルスの幅は、信号が移動した距離、つまりレンジャーからオブジェクトまでの距離を示します。したがって、エコーラインは、幅がオブジェクトまでの距離に比例するパルスです。 1cmの場合、エコーパルス幅は58マイクロ秒になります。 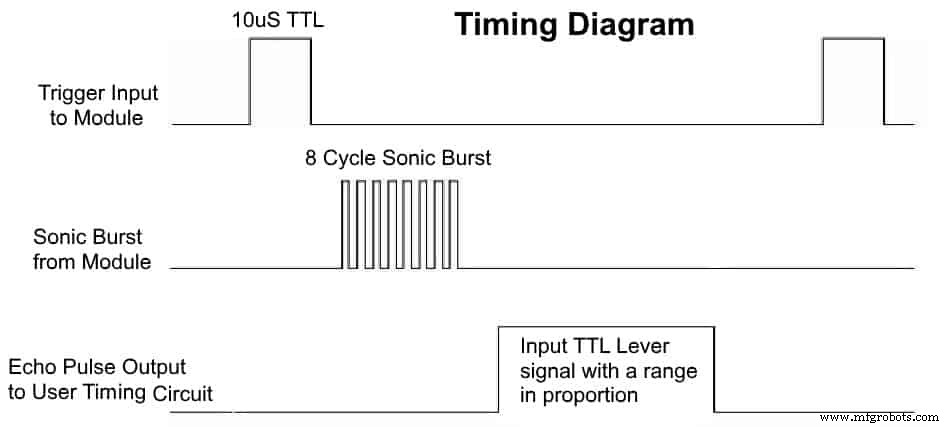
図3:SRF04のタイミング図
PICマイクロコントローラーPIC16F84A:
図4:PICマイクロコントローラーPIC16F84A
これは、CMOS互換の8ビット18ピンフラッシュマイクロコントローラーで、単一の8ビットタイマー(8ビットのプログラム可能なプリスケーラー付き)を備えています。タイマーの動作は、OPTION_REG、TMR0、INTCONのレジスタを使用して制御されます。 OPTION_REGは、5番目の の8ビットレジスタです。 ビット(T0CS)は、必要なタイマまたはカウンタ動作を選択します。
ビットを設定するとカウンター動作が選択され、クリアするとタイマー動作が選択されます。 TMR0はタイマーレジスタですが、INTCONは5
th
の割り込みレジスタです。 ビット(T0IE)はタイマーフラグを示します。つまり、タイマーがオーバーフローしたときにセットされます。 
モータードライバーL293D:
図5:モータードライバーIC L293D
これは、16ピンのHブリッジベースのDCモータードライバーICです。 2つのモーターを両方向に駆動する能力があります。これは2つのイネーブルピン(ピン1と9)で構成されており、HIGHに設定するとICの動作を有効にします。これは基本的に、マイクロコントローラーとDCモーター間のインターフェースとして機能します。これは4つの入力ピンで構成されています–各Hブリッジ回路に2つ。以下にモーターコントロールを示す表を示します。 
| IN1(ピン2) | IN2(ピン7) | EN1(ピン1) | モーター操作 |
| オン(時計回り) | |||
| オン(アンチロックワイズ) | |||
| X | X |
注:SRF04はTTL互換デバイスであり、PIC16F84AはCMOS互換であるため、電圧レベルの変化を補償するために、1K値のプルアップ抵抗を使用しています。
自動水位コントローラーの動作と操作
プログラムは、マイクロコントローラーから10マイクロ秒のパルスが送信されて超音波レンジャーがトリガーされるように作成されています。これは、遅延関数を使用して書き込まれます。タイマーレジスタTMR0には10進値200がロードされるため、55カウントになります。
SRF04からの出力であるエコー信号は、ピンRA4(タイマークロックピン、つまりタイマーに外部クロックパルスを提供)で受信されます。エコー信号がHIGHからLOWに遷移すると、タイマーがアクティブになります。タイマーがカウントされると、割り込みフラグビットT0IEが監視されます。設定すると、タイマーは無効になります。
この手順は、別のエコーパルスに対して繰り返されます。タイマーが動作する回数が計算され、これはエコーパルスの数を示します。各エコーパルスは58マイクロ秒であるため、1cmを示します。したがって、5つのエコーパルスは5cmを示します。整数で格納されたこのカウントの値は、DCモーターを制御するために使用されます。
値が2〜5の場合、マイクロコントローラーはピンRB0とRB1(それぞれL293DのIN1とIN2に接続)にHIGH信号を送信して、モーターをオフにします。値が5〜20の場合、マイクロコントローラーはIN1にHIGH信号を送信し、IN2にLOW信号を送信して、モーターのスイッチをオンにし、時計回りに回転させます。値が0〜1の場合、マイクロコントローラーはLOW信号をIN1に送信し、HIGH信号をIN2に送信して、モーターのスイッチをオンにし、反時計回りに回転させます。
SRF04を使用した自動水位コントローラーの利点
- シンプルで便利なシステムになります。
- 低コストのコンポーネントを使用しているため、低コストのシステムになります。
- 自動技術を使用すると、手動の手段を使用して水位制御で直面するハードルを取り除くことができます。
- 機械部品を使用していないため、機械的な摩耗や腐食のリスクがなくなります。
自動水位コントローラーの欠点
- 超音波距離計SRF04は、多くの電子機器を使用しているために減衰するため、適切に絶縁する必要があります。
- このシステムは、センサーとアクチュエーターを互いに近接して配置する必要があるように設計されています。素人の言葉で言えば、この制御システムは、水タンクが送水ポンプの近くにある場所のためのものです。したがって、水中ポンプが使用され、水タンクが屋上にある多くの建物では、この自動水位コントローラーシステム 使用できません。ただし、これは通信回路を使用して変更できます。
産業技術