


6-シューター:Arduinoドリンクミキシングステーション
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 7 | ||||
 |
| × | 8 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
はじめに
ボタンを押すだけで飲み物を混ぜたいですか? 6シューターは、1つのポンプで6種類の飲み物の組み合わせを組み合わせることができます。リストから飲み物を選択し、ボタンを押すだけで、飲み物が注がれ、軽いショーが表示されます。このチュートリアルでは、Somabarに似たものを作成します。 これはかなり費用のかかるプロジェクトであることに注意してください 、しかしそれは本当にパーティーで心を打つ。自分で作りたいですか?始めましょう!
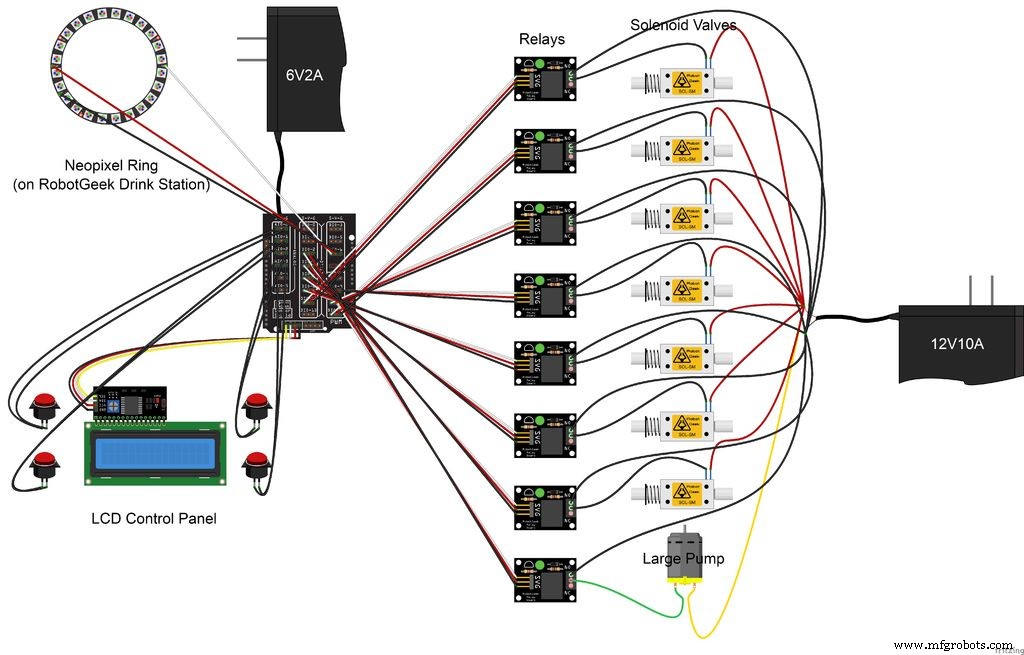
ステップ1:配線 <図>
 <図>
<図>  <図>
<図> 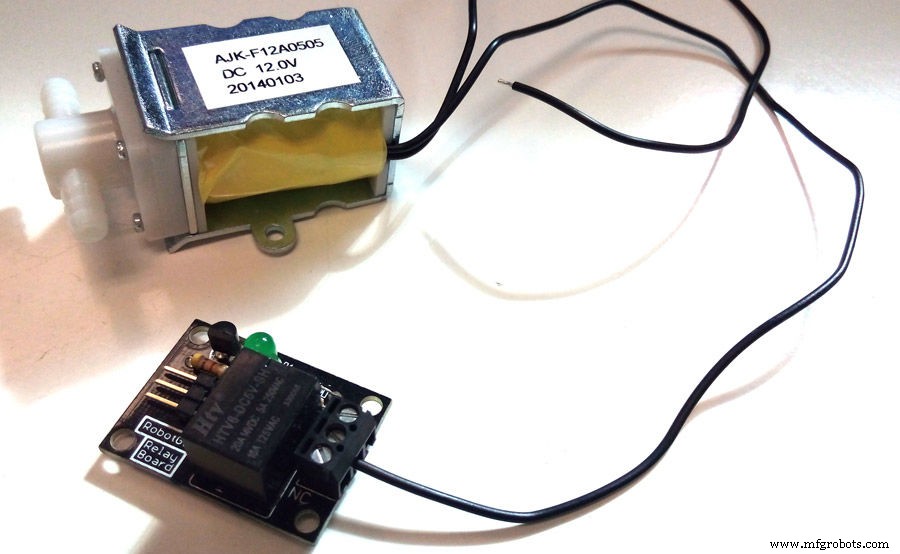 <図>
<図>  <図>
<図> 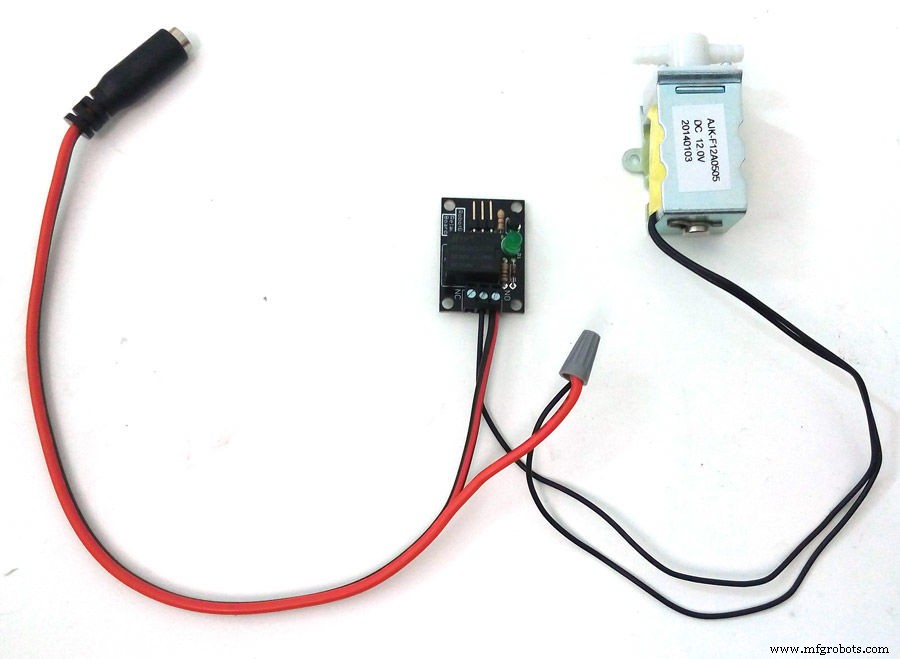
これはかなり激しい配線のように見え、少し混乱していますが、実際には同じプロセスが数回繰り返されています。
ソレノイドバルブをリレーに接続するには:
- リレー、ソレノイドバルブ、DCメスジャックピグテール、およびワイヤーナットを準備します
- ソレノイドバルブからリレーの中央端子にワイヤーを接続します
- DCジャックからのアース線をNOに接続するか、リレーで通常開にします
- ワイヤーナットを使用するか、接続をはんだ付けすることにより、ソレノイドバルブからのもう一方のリード線をDCジャックからの電圧ワイヤーに接続します。ワイヤーナットを使用したのは、迅速で汚れが好きなためですが、はんだ付けすることで電気接続が向上します。
上記と同じプロセスがポンプに適用されますが、マイナス(黒、アース)リード線はリレーの中央端子に接続され、プラス(赤、電圧)リード線はDCジャックの電圧線に接続されます。
>ビルド LCDコントロールパネル とRobotGeekドリンクステーションを配線する前に。
コンポーネントをセンサーシールドに取り付けます:
<図>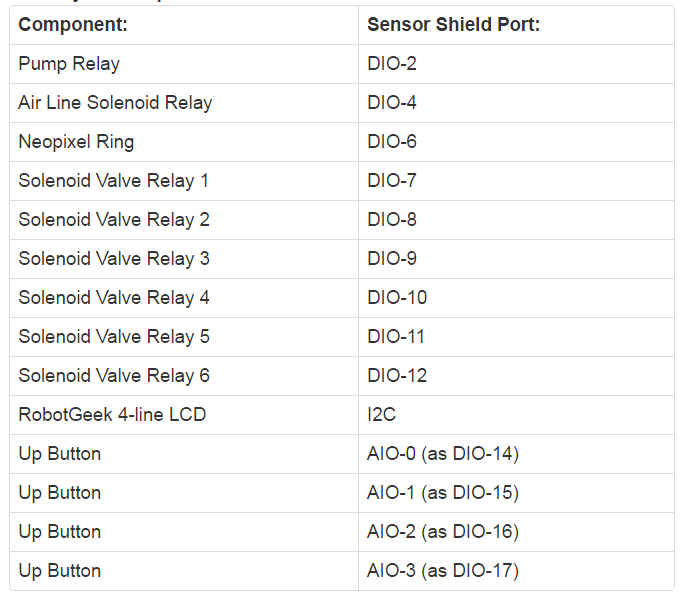
ステップ2:組み立て <図>
 <図>
<図> 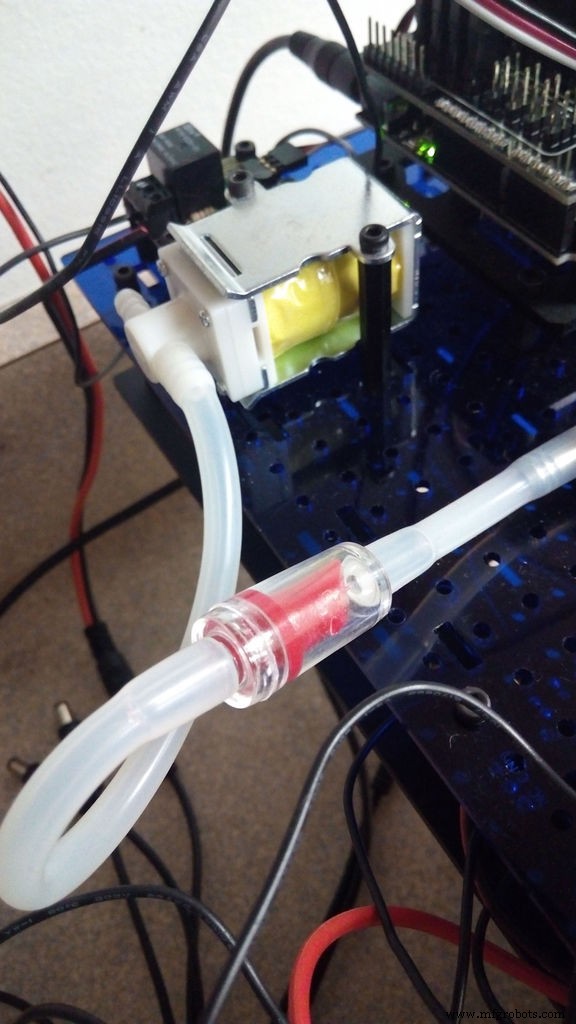 <図>
<図> 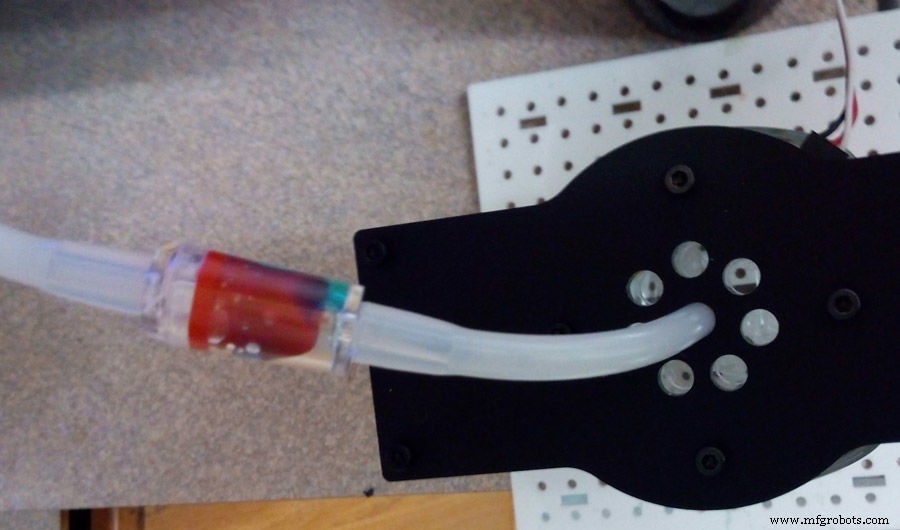 <図>
<図> 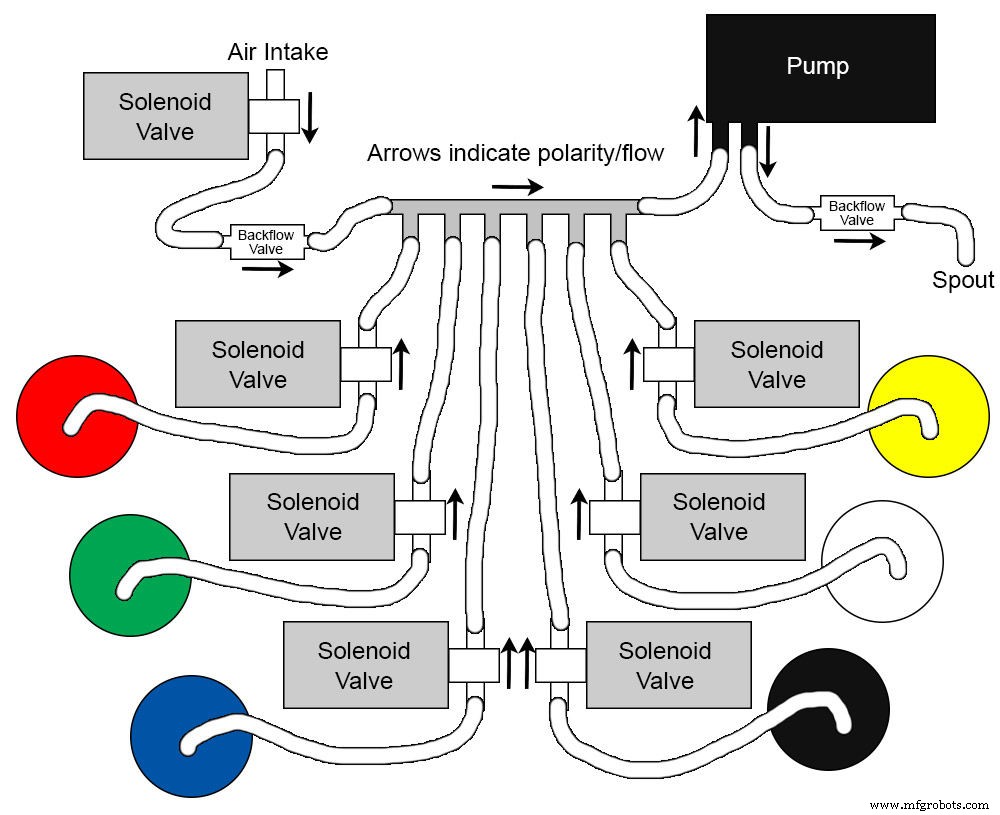
ワイヤにストレスがかからず、電子機器に液体の危険がないようにコンポーネントを配置します。もう1つの考慮事項は、2つのワークベンチプレートの間にワイヤーの混乱を封じ込めることです。コンポーネントの配置に関するインスピレーションを得るために写真をチェックし、素晴らしい図(MSペイントで1万時間)をチェックして、ポンプで機能する適切な方向で液体ラインを実行していることを確認してください。
ステップ3:プログラミングとテスト
RobotGeekライブラリとツールを入手する必要があります。 6-Shooterに使用されるすべてのライブラリと、実行するためのデモコードが含まれています。 Arduinoフォルダーに入れ、IDEを開いて、ロードします:
robotGeekLibrariesAndtools-master.zip ファイル→Sketchbook→RobotGeekSketches→デモ→drinkStation そして、コードを見てみましょう:
// SelectionsString selectionLine [14] ={""、//バッファライン。ここを離れるか、恐怖を体験してください。 「1.赤」、「2。緑」、「3。青」、「4。黄」、「5。白」、「6。黒」、「7。赤と黄」、「8。緑と青」 "、" 9.白黒 "、"10。白黒 "、" "、//バッファライン。ここを離れるか、恐怖を体験してください。 ""、//バッファ行。ここを離れるか、恐怖を体験してください。 "リストの終わり" //バッファ行。ここを離れるか、恐怖を体験してください。 }; これは飲み物のリストです。これらの名前はLCD画面に表示され、スクロールして選択できます。利用可能な飲み物と混合物を正確に反映するようにこれを変更できます。
int PUMP_TIME =2500; //ポンプ場がミリ秒単位で実行される時間 これはデフォルトのポンプ稼働時間です。これを変更して、デフォルトでより大きなショットを配信できます。
LiquidCrystal_I2C lcd(0x27、20、4); // I2C 4 Row 20 Col LCD Screen at 0x27 // LiquidCrystal_I2C lcd(0x3F、20、4); // I2C 4 Row 20 Col LCD Screen at 0x3F これが画面と呼ばれる場所です。一部の画面のアドレスは他の画面とは異なるため、スケッチを読み込んだときに画面にリストが表示されない場合は、ここでアドレスを変更してください。
if(debounce [2] .fell()){switch(drinkSelectCounter){case 1://赤lcd.setCursor(0、0); lcd.print(promptLine [2]); colorWipe(strip.Color(255、0、0)、50); //赤digitalWrite(PUMP_RELAY_PIN、HIGH); //ポンプをオンにしますdigitalWrite(SELECTED_RELAY_PIN [0]、HIGH); //ソレノイドバルブを開きます1delay(PUMP_TIME); //設定された時間実行しますdigitalWrite(SELECTED_RELAY_PIN [0]、LOW); //ソレノイドバルブ1を閉じますdigitalWrite(CLEAN_RELAY_PIN、HIGH); //ソレノイドバルブを開きます7delay(PUMP_TIME); //設定された時間実行しますdigitalWrite(CLEAN_RELAY_PIN、LOW); //ソレノイドバルブ7を閉じますdigitalWrite(PUMP_RELAY_PIN、LOW); //ポンプブレークをオフにします; これは飲み物の呼び出しであり、リストの最初の飲み物の操作です。混ぜたい飲み物に合うように、それぞれのケースを追加または変更できます。それぞれのケースは、画面上のプロンプトを変更することから始まり、ライトをオンにし、適切なバルブを開いてポンプを運転するという一連のアクションです。少なくとも1つのバルブが開いている場合にのみポンプを運転する必要があります。
コードをマイクロコントローラーにアップロードして、回転させてください。ビルド内の何かがファンキーな場合に備えて、最初に水でテストすることをお勧めします。混合物をテストする前に、必ずすべてのバルブを個別にテストしてください。操作に満足したら、パーティーの計画を始めましょう!
ステップ4:パーティーダウン!
これで自動バーテンダーができました!ボタンを押すだけでロボットから完璧に作られた飲み物を手に入れると、ゲストはひっくり返ります!この時点から何ができますか? Bluetooth機能を追加し、ゲストが携帯電話から飲み物を選択できるアプリを作成するのはどうですか(MIT App Inventorはこのための優れたツールです)。ロボットアームを追加して、飲み物を複数のグラスに届け、実際に靴下を脱ぎ捨ててはどうでしょうか。たぶん、この悪い男の子をローバーに乗せて、ドロイドを提供する飲み物を家の周りに転がす方法を見つけることができますか?いつものように、私たちはあなたが思いついたものを聞いてみたいです!
コード
- コードスニペット#2
- コードスニペット#5
コードスニペット#2 プレーンテキスト
// SelectionsString selectionLine [14] ={""、//バッファライン。ここを離れるか、恐怖を体験してください。 「1.赤」、「2。緑」、「3。青」、「4。黄」、「5。白」、「6。黒」、「7。赤と黄」、「8。緑と青」 "、" 9.白黒 "、"10。白黒 "、" "、//バッファライン。ここを離れるか、恐怖を体験してください。 ""、//バッファ行。ここを離れるか、恐怖を体験してください。 "リストの終わり" //バッファ行。ここを離れるか、恐怖を体験してください。 }; コードスニペット#5 プレーンテキスト
if(debounce [2] .fell()){switch(drinkSelectCounter){case 1://赤lcd.setCursor(0、0); lcd.print(promptLine [2]); colorWipe(strip.Color(255、0、0)、50); //赤digitalWrite(PUMP_RELAY_PIN、HIGH); //ポンプをオンにしますdigitalWrite(SELECTED_RELAY_PIN [0]、HIGH); //ソレノイドバルブを開きます1delay(PUMP_TIME); //設定された時間実行しますdigitalWrite(SELECTED_RELAY_PIN [0]、LOW); //ソレノイドバルブ1を閉じますdigitalWrite(CLEAN_RELAY_PIN、HIGH); //ソレノイドバルブを開きます7delay(PUMP_TIME); //設定された時間実行しますdigitalWrite(CLEAN_RELAY_PIN、LOW); //ソレノイドバルブ7を閉じますdigitalWrite(PUMP_RELAY_PIN、LOW); //ポンプブレークをオフにします; Github
https://github.com/robotgeek/robotGeekLibrariesAndtools/archive/master.ziphttps://github.com/robotgeek/robotGeekLibrariesAndtools/archive/master.zip製造プロセス