


超音波セキュリティシステム
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 10 |
このプロジェクトについて
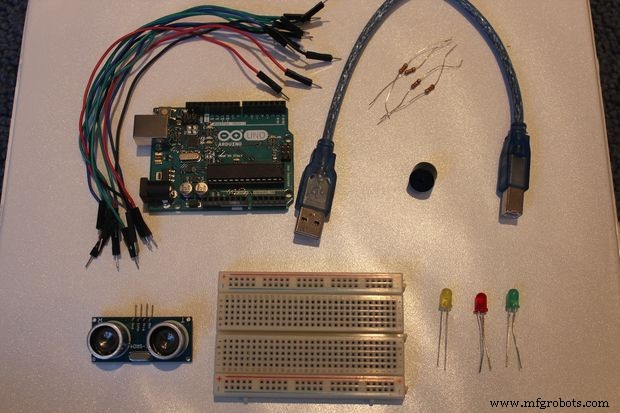
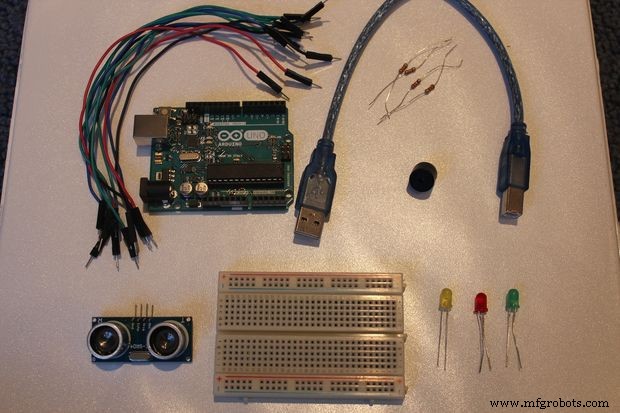
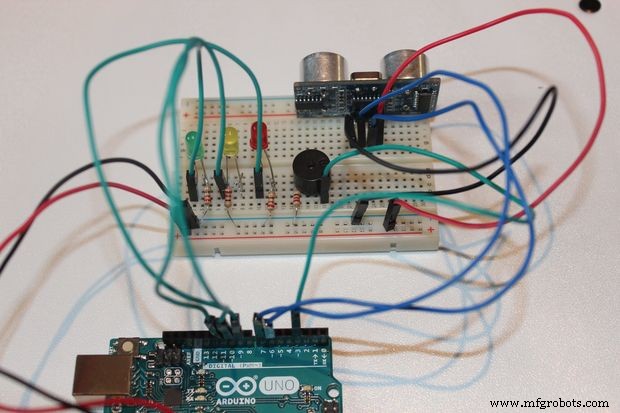
ステップ1:材料を組み立てる <図>
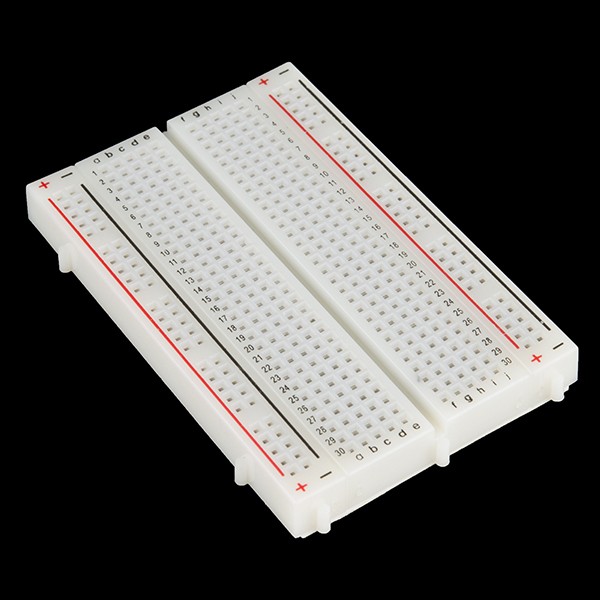
ステップ2:セットアップ <図>
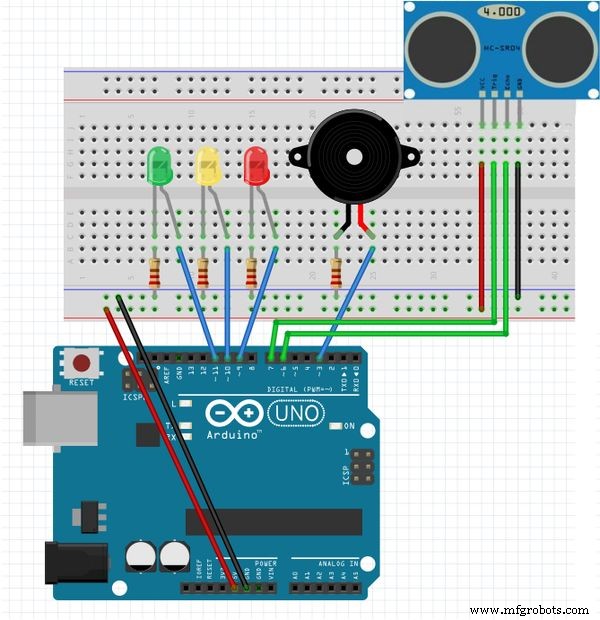
Arduinoの5Vピンからブレッドボードのプラスチャンネルに赤いワイヤーを接続します。 ArduinoのGNDピンからブレッドボードの負のチャネルに黒いワイヤーを接続します:
- ブザー=ピン7
超音波センサーについて:
- エコー=ピン3
- Trig =ピン2
LED:
- RedLED =ピン4
- YellowLED =ピン5
- GreenLED =ピン6
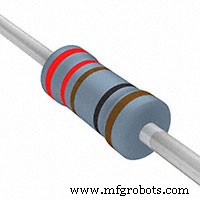
LEDに接続されている緑色のワイヤは、LEDの正の側に一列に接続する必要があり、LEDの負の側は、220オームの抵抗を使用してブレッドボードの負のチャネルに接続する必要があります。
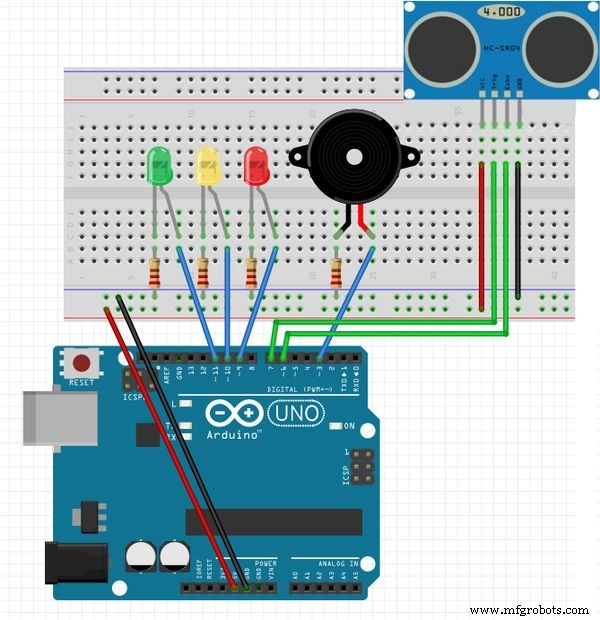
ステップ3:組み立て-ブレッドボード <図>
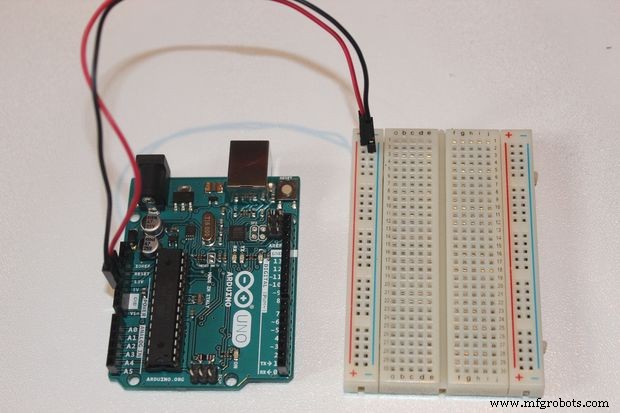
まず、Arduinoの5VピンとGNDピンをブレッドボードに接続しましょう。前述したように、5Vピンに接続されているワイヤがブレッドボードの正のチャネルに接続され、GNDピンに接続されているワイヤがブレッドボードの負のチャネルに接続されていることを確認してください。
ステップ4:組み立て-超音波センサー <図>
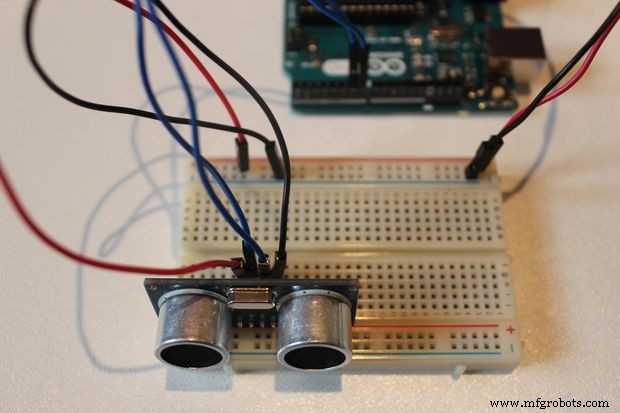
HC-SRO4超音波センサーを接続する時が来ました!優れたヒントは、超音波センサーをブレッドボードのできるだけ右に配置し、それが外側を向いていることを確認することです。セットアップ画像に戻って参照すると、超音波センサーのGNDピンをブレッドボードの負のチャネルに接続する必要があります。次に、センサーのTrigピンをArduinoのピン2に接続し、センサーのEchoピンをArduinoのピン3に接続します。最後に、超音波センサーのVCCピンをブレッドボードの正のチャネルに接続します。混乱することがあれば、上の写真を参照してください。
ステップ5:組み立て-LED <図>
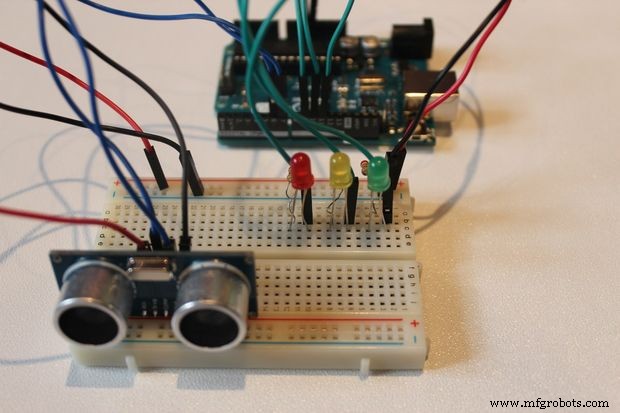
次のステップは、LEDをブレッドボードとArduinoに接続することです。必要に応じて、セットアップ画像(ステップ2)を参照することを強くお勧めします。LEDの取り付けは非常に簡単で、繰り返しが多くなります。まず緑色のLEDを取り付けましょう。したがって、これを行う方法は、アノード(長い方の脚)をArduinoのピン6に緑色のワイヤーで接続し、カソード(短い方の脚)をブレッドボードの負のチャネルに220オームを使用して接続することです。抵抗器。次に、黄色のLED、次に赤色のLEDについてこの手順を繰り返し、黄色のLEDのアノード(長い方の脚)をArduinoのピン5に接続してから、赤色のLEDのアノードをピン6に接続します。そうすれば、セットアップは上の図のようになります。
抵抗器は絶対に必要というわけではありませんが、使用することを強くお勧めします。
ステップ6:組み立て-ブザー <図>
このためのセットアップの最後の部分は、ブザーをブレッドボードとArduinoに接続することです。これは、セットアップ全体の中で最も簡単な部分の1つです。必要なのは、ブザーの長い方の脚を緑色のワイヤーを使用してArduinoのピン7に接続し、次にブザーの短い方の脚を220オームの抵抗を使用してブレッドボードの負のチャネルに接続することです。
>ブザーの短い方の脚をブレッドボードの負のチャネルに接続する際には、抵抗を使用することを強くお勧めします。これにより、ブザーの音量が大幅に減少し、ブザーがすぐに死ぬのを防ぎます。
コード
- 超音波セキュリティシステム
超音波セキュリティシステム Arduino
#define trigPin 2#define echoPin 3#define LEDlampRed 4#define LEDlampYellow 5#define LEDlampGreen 6 #define soundbuzzer 7int sound =500; void setup(){Serial.begin(9600); pinMode(trigPin、OUTPUT); pinMode(echoPin、INPUT); pinMode(LEDlampRed、OUTPUT); pinMode(LEDlampYellow、OUTPUT); pinMode(LEDlampGreen、OUTPUT); pinMode(soundbuzzer、OUTPUT);} void loop(){long durationindigit、distanceincm; digitalWrite(trigPin、LOW); delayMicroseconds(2); digitalWrite(trigPin、HIGH); delayMicroseconds(10); digitalWrite(trigPin、LOW); durationindigit =pulseIn(echoPin、HIGH); distanceincm =(durationindigit / 5)/ 29.1; if(distanceincm <50){digitalWrite(LEDlampGreen、HIGH);} else {digitalWrite(LEDlampGreen、LOW); } if(distance <20){digitalWrite(LEDlampYellow、HIGH);} else {digitalWrite(LEDlampYellow、LOW); } if(distance <5){digitalWrite(LEDlampRed、HIGH);サウンド=1000;} else {digitalWrite(LEDlampRed、LOW); } if(distanceincm> 5 || distanceinsm <=0){Serial.println( "許容距離範囲外"); noTone(soundbuzzer); } else {Serial.print(distance); Serial.println( "cm");トーン(ブザー、サウンド); } delay(300);} 回路図
製造プロセス