


ロボットはどのようにして完全な自律性に到達しますか?
ほとんどの人が完全自律型ロボットについて考えるとき、彼らは私たちが意識について知っている実際の事実、そして謎にほとんど根拠がない空想的なAIシナリオについて心配します。それに固執する一方で、収益性とプラスの影響の両方を改善するためにさらに多くの助けを必要とするさまざまな仕事、プロセス、および産業がある場合、人々が独立して実質的な監視なしに機能できるロボットの実用的な価値を理解することは難しくなります。
同時に、ロボットの自律性は、ロボットが自律的になり、どこでなる必要があるかを理解するのに必ずしも役立つとは限らない、暴走する定義と期待の犠牲になっています。 自律性は最も迅速に達成できます。
ロボットが完全な自律性に到達できるようにするには、複数の基準を満たす必要があります。
- ロボットは、それ自体で環境に関する有意義な情報を取得できる必要があります
- ロボットは、その情報を構造化された使用可能な方法で処理できる必要があります
- ロボットは、その情報に応じて行動を計画できる必要があります
- ロボットは、生成した計画をタイムリーに実行できる必要があります
これらすべての状況において、さらにいくつかのことを理解することが重要です。 これらのパラメータの構造について:
- ロボットには目標が必要です。私たちは伝統的に人間の自律性を自分の目標を設定する能力と関連付けていますが、今日のロボットが自己認識するパラメータは期待されていません。
- ロボットの自律性はユースケース固有である必要があります。完全自動運転車は、さまざまなレベルで機能できます。一部は高速道路で、その他はすべての地形で機能します。状況に応じて、どちらも同じ程度の自律性を発揮できます。
- 設計は、人間の入力の必要性を最小限に抑える場合に最適に機能します。特定の自律型「コボット」アプリケーションは、生産性や目的の目標の達成を最適化するのに役立ちますが、ほとんどの場合、自律性は、人間が直接関与する場合の適切な資格ではありません。必要とされている。
では、どのようにしてA点からB点に到達するのでしょうか。従来の「プログラム可能な」ロボットはどのようにして完全に自律的になりますか?さて、そこから楽しみが始まります!
環境に関する情報を入手する
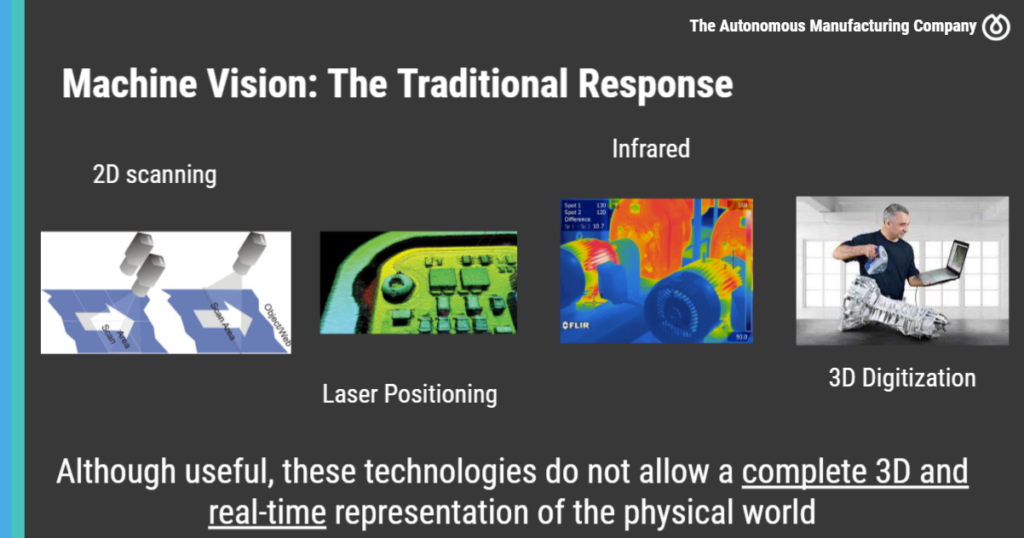
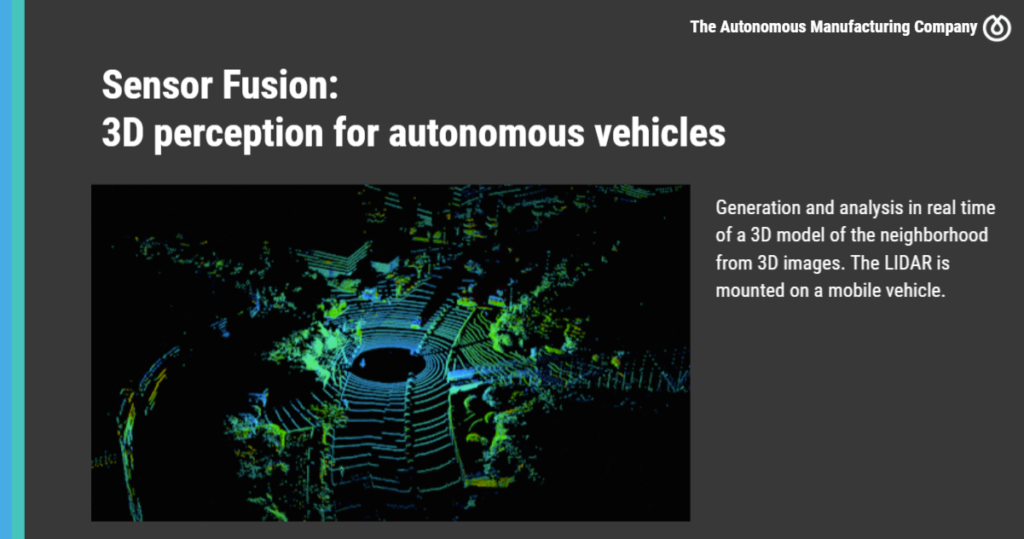
ロボットに周囲の状況を知らせるための幅広いソリューションがあります。 Lidar、レーダー、ソナー、触覚センサー、あらゆる種類のビジョンシステム、ロボット外センサー、カメラ、または本質的にオーディオまたはビデオである可能性のあるローカル情報システムからの無限の数の異なる通信メカニズム。これらはすべて、ロボットに人間と同じ種類の感覚を与える試みであり、高度に専門化された自動化プロセスの自動機械制御などの分野で長い間標準となっています。
ここでの制限はセンシングだけではないことを考慮することが重要です。たとえば、現在IoT(Internet of Things)に対応している、または少なくともネットワーク化されている産業用システムでは、さまざまなプロセスとプログラマブルロジックコントローラーをさまざまなストリングで接続して、さまざまなプロセスを実行できます。ただし、そこから実行できることは、実際にはその情報をロボットプロセスに組み込んで、オブジェクト上で行われる位置、向き、および必要な操作を理解することです。
産業環境の外では、同じモデルを適用できますが、適切なタイプの接続された情報を使用してコンテキスト化する必要があります。たとえば、誰かが医療や介護用のロボットを作成しようとしている場合、外部センシング機能は患者の健康を管理するのに役立つかもしれませんが、適切なセキュリティと匿名化がなければ、誰であるかに関してプライバシーや代理店のリスクをもたらす可能性もありますどのような状況下でどのロボットによって世話をされました。
同様に、5Gは、将来の自動運転車を調整し、道路状況、ボトルネック、道路の封鎖などを最適化しながら、運転と輸送のあらゆる側面を自動化する効率を生み出す主要な機会と見なされています。これらは非常に強力なアプリケーションですが、情報をロボットに変換する方法は慎重に扱う必要があります。結局のところ、大きな力には大きな責任が伴います。
構造化された方法で情報を処理する
情報を使いやすい方法で消化するにはどうすればよいでしょうか。私たちが人間としてどのようにそうするかを考えるとき、それは私たちがどのように決定を下すかという点で第二の性質であるか、しばしば本能的です。私たちがしばしば気付かないのは、私たちの決定の多くは、進化的、社会的、または行動的に獲得された特性、および私たちの性格の特徴に基づいているということです。
ただし、ロボットに関しては、驚きは好きではありません。嬉しい驚きです。確かに、ロボットを見つけることは、私たちが期待するよりも優れているか、効率的です。しかし、それが自律型ロボットのすべての可能な機能を予測する必要がある場合は、配達、輸送、ケアの提供などです。 、マテリアルハンドリング、検査、予知保全、産業プロセス、または単にバックフリップを行うロボット犬–期待を管理することは、「機能の失敗」よりもはるかに望ましいことです。
このため、自律型ロボットを作成しても、箱から出してすぐに機能することはめったにないことを理解することが重要です。一部の企業や学者は、自律型ロボットの基本的なセンシングおよび処理モデルを簡素化する方法に取り組んでいますが、これらのモデルは、ロボットが実用的な方法で情報を使用する能力を簡素化するプロセスモデルに最終的に貢献する必要があります。
データからの計画アクション
ロボットの検知メカニズムによって生成されたデータは、さまざまな方法で消化できます。最終的に、3Dビジュアルデータの場合、可能な最も簡単な方法は、図形上のデータを分解してオブジェクト全体に再統合することです。これは、多くの小さな操作の蓄積を必要とする並列プロセスです。人間の脳はこのように非常に柔軟に機能しますが、このタイプの処理のための信頼できるモデルを生成するには、かなりの繰り返しと検証が必要です。
このプロセスの最も有用な側面は、ロボットが実行する必要があるすべてのプロセスモデル全体にデータを注入することです。何かを持ち上げて運ぶ?レターボックスにメールをドロップしますか?何かを一緒にペイントまたは溶接しますか?これらの各アクションには、目標の性質、場所、位置、および非準拠の結果を全体的に理解する必要があります(たとえば、メールは箱に入れられますが、下部に穴があり、茂みに落ちます)。
同時に、このメールの例を拡張するには、ロボットの自律機能の主要な優先順位に負担をかけずに、自動化された方法で依然として許容できる結果に到達するために、フォールバックの目標を設定する必要があります。もっと簡単に言えば、自律型ロボットは即興で演奏できる必要がありますが、即興を計画するには多くの作業が必要です。
マーク・トウェインがかつて言ったように、「良い即席のスピーチを準備するのに通常3週間以上かかります。」これは単なるglibbon motではありませんが、実際には人間の働き方について非常に有益です。私たちはしばしば目の前の仕事に集中するかもしれませんが、「proprioreception」のような才能が追加された洗練された潜在意識の習慣がありますが、これはあまり認識されていません。
これらはロボットにとって完璧なスキルですが、木からサバンナでの狩りまですべてを行う必要があり、おそらくホイールを発明して少し後で発射する必要があります。これらの機能を開発するのに何百万年もかかったので、ロボットを自律的に機能させるのに午後以上かかるかもしれないことに驚かないでください。
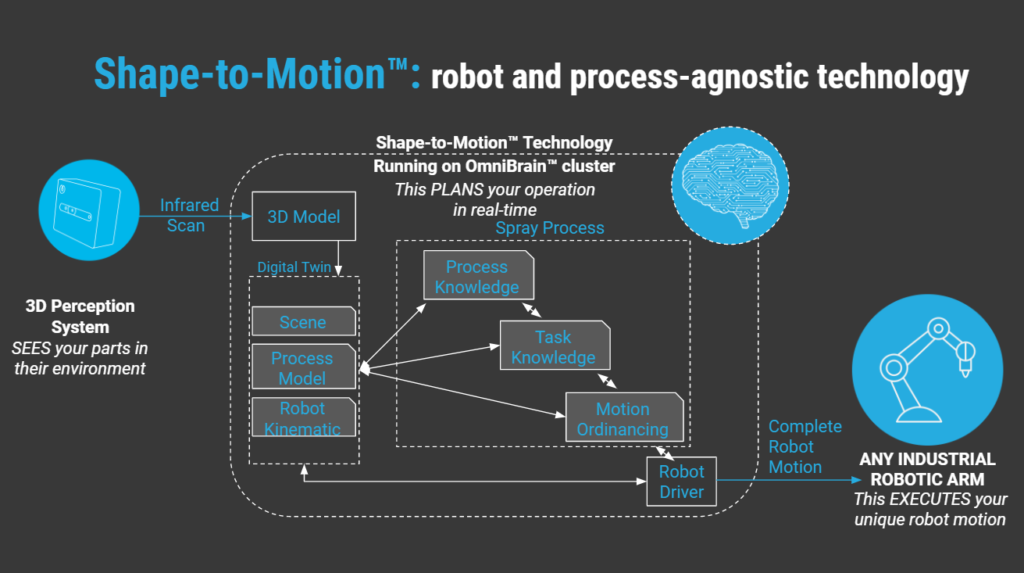
それで、この文脈では、ロボットの答えは何ですか?人間が行動を起こす前に行動を視覚化するのとほぼ同じように、自律型ロボット機能のシミュレーションまたはデジタルツインを生成し、それを使用してプロセスモデルの期待値(メールボックスが通常どこにあるか、どのように見えるかなど)を注入します。便利な自律型ロボットを作成するための最大のステップ。
計画の実行
プロセスモデル、十分なシミュレーション、および正しく調整されたセンシングメカニズムができたら、実行は単に観察と最適化の問題です。構築している自律型ロボットが箱から出してすぐに基準を満たしている場合は、それを行う必要もありません。ロボットの基本的な価値はその一貫性であり、既存の最新の産業用ロボットは非常に信頼性があります。知覚とインテリジェンスのレイヤーを追加して、レスポンシブにします。 さまざまな部分や位置に移動することで、私たち全員が探求しようとしているまったく新しい自律の世界が生まれます
その自律性の次は何ですか?上記のようにアプリケーションの構築方法を簡素化するだけでなく、実行可能なセンサー、ロボットの配置、タスク、環境などの幅を広げます。ばかげたことは、自動化が生産性を生み出し、それが最終的に成長、収入、そして労働需要を増加させるということです。自動化を労働力への脅威と見なすことは、本当の脅威です。 、より多くのスペースに自動化をもたらしながら労働者が嫌う 人々が仕事をする必要がある場合でも、仕事をこれまで以上に創造的、革新的、そして楽しいものにするでしょう。 お楽しみください!

Omniroboticは、スプレープロセスに自律ロボティクステクノロジーを提供し、産業用ロボットが部品を確認し、独自のモーションプログラムを計画し、重要な産業用コーティングおよび仕上げプロセスを実行できるようにします。 ここで、どのような見返りが得られるかを確認してください 、またはどのように利益を得ることができるかについて詳しく知る 自律型製造システム 。
産業用ロボット