


エンド オブ アーム ツールの作成方法
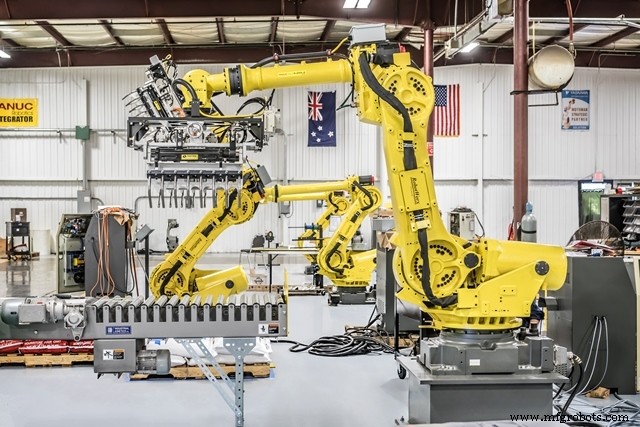
産業用ロボットは、ロボットのアーム先端ツーリング (EOAT) なしではほとんど役に立ちません。 EOAT は、産業用ロボット (Fanuc ロボットの場合は J6 軸、Motoman ロボットの場合は T 軸) の手首に取り付けられ、ロボットと製品の間の接続を提供します。産業用アプリケーションの自動化を成功させるには、正しい EOAT を選択して構築することが最も重要です。
ステップ 1: 最初のステップは、アプリケーションに最適なロボットのアーム先端ツーリングのタイプを決定することです。グリッパーは、多くの場合、マテリアル ハンドリング アプリケーションで使用されます。溶接トーチと溶接ガンは、アーク溶接とスポット溶接で使用されます。ロボットの手首に取り付けられたスピンドルは、材料に穴を開けたり、切断したり、フライス加工したりできます。さまざまな種類の産業用アプリケーションを自動化するために利用できる多数のオプションがあります。
ステップ 2: 次に、ユーザーは、EOAT を社内で製造するか、外部ソースが設計および製造するかを決定する必要があります。多くの場合、EOAT を社内で構築するとコストが節約されますが、その過程で専門知識と品質が犠牲になる可能性があります。 EOAT 製造を専門家または産業用ロボット インテグレーターにアウトソーシングすることで、頭の痛い問題を解決でき、ロボット アームの購入と一緒にパッケージ化すれば、費用を節約できる可能性があります。
EOAT が社内で製造されているか、ロボット統合の専門家によって製造されているかにかかわらず、処理、溶接、またはその他の方法で操作される部品の仕様に対処する必要があります。重量、長さ、素材、およびその他の要因が、EOAT のタイプ、サイズ、方向に影響を与えます。これらは、EOAT の決定と導入において非常に重要な詳細です。
RobotWorx は、当社が販売する多くの産業用ロボット用の多くのロボット アーム エンドツーリングを製造し、含めています。適切な EOAT と産業用ロボット アームの選択については、RobotWorx の専門家にオンラインで連絡するか、877-762-6881 に電話して連絡してください。
産業用ロボット