


ROS2 + DDS統合:エコシステムが統合するとき| RTI

2018年7月に発表されたように、 「BouncyBolson」と呼ばれるROS2は、Intel Linux、Windows、およびiOSプラットフォーム用のROS2Webサイトからダウンロードできるようになりました。
これがなじみのないように聞こえる場合、ROS(Robot Operating System)は、ロボットシステムを構築するためのオープンソースフレームワークおよびツールスイートであり、2つの主要なフレーバーがあります。ROS–オリジナルPythonとXMLを使用した調査バージョン、およびROS2 –接続フレームワークとしてDDSを使用するパフォーマンスが強化されたバージョン。
ROS2 BouncyBolsonについて
「弾む」リリースは、非商用ライセンスの下でバイナリ配布にRTI Connext DDSが含まれているため、特別です。プロフェッショナルグレードのDDSは、ロボット工学アプリケーションにROS2を使用する研究者、評価者、学者にとって、費用のかからないオプションになりました。
これは、DDSに固有の標準ベースの相互運用性のおかげで、すべてのROS2ユーザーがDDSツールとサービスエコシステムを利用できることを意味します。
- RTI管理コンソール:システム接続の問題を診断するための頼りになるツール。
- RTIシステムモニター:システムパフォーマンスを調整および最適化するための最良のツール。
- RTIレコーディングサービス: システムからのトピックデータの高帯域幅、長時間の記録と再生。
- RTIルーティングサービス: アーキテクチャのブリッジ/ゲートウェイとして機能する、すぐに使用できるソリューション。
RTI管理コンソールでROS2接続の問題を簡単に診断および理解できる方法を見てみましょう。最近、ROS2用のLiDARデータソースをまとめましたが、RVizを使用してデータを表示しようとした最初の試みでは、データがありませんでした。 RVizの端末は、多くの役立つメッセージを生成していませんでした:

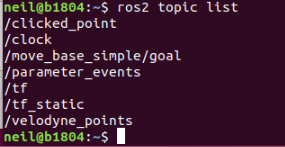 トピック「/ velodyne_points」に興味があります。
トピック「/ velodyne_points」に興味があります。  「/ velodyne_points」の発行元はデータを生成していますか?:
「/ velodyne_points」の発行元はデータを生成していますか?: 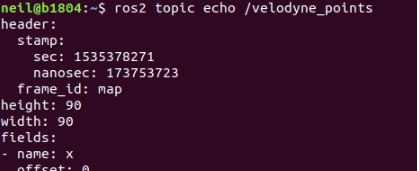 はい。 。 。では、なぜデータがRVizによって表示されないのですか?
はい。 。 。では、なぜデータがRVizによって表示されないのですか? 管理コンソール
RTIランチャーで便利に利用できるRTI管理コンソールを使用してこの問題を診断してみましょう:

管理コンソールが起動された瞬間から、DDSネットワーク参加者に問題があることが通知されます(赤いXボックスインジケーターに注意してください):
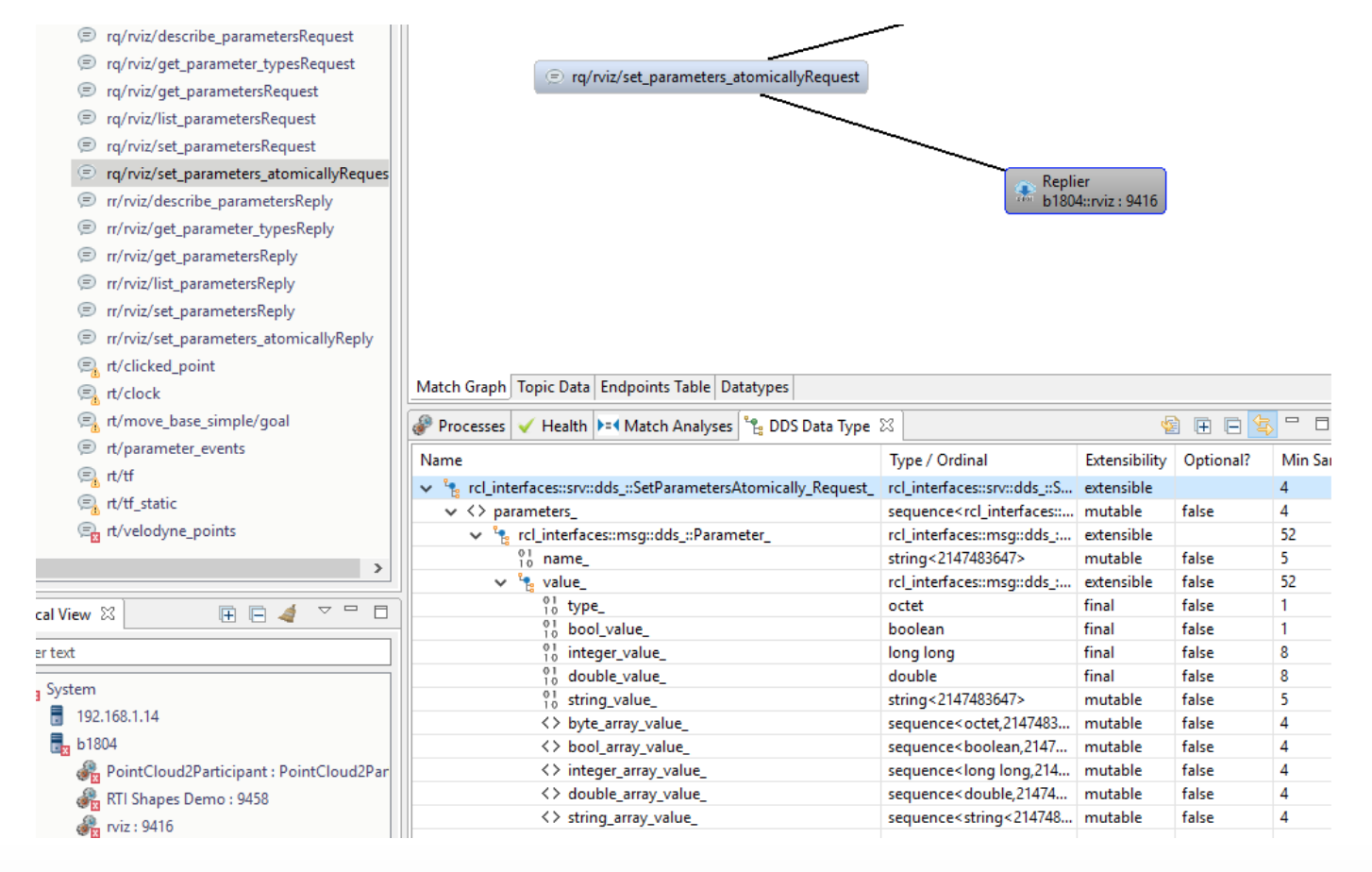
 「ドメイン0」を展開し、関心のあるトピックを強調表示します(/ velodyne_points)問題の原因をすぐに示します–QoSの不一致:
「ドメイン0」を展開し、関心のあるトピックを強調表示します(/ velodyne_points)問題の原因をすぐに示します–QoSの不一致: 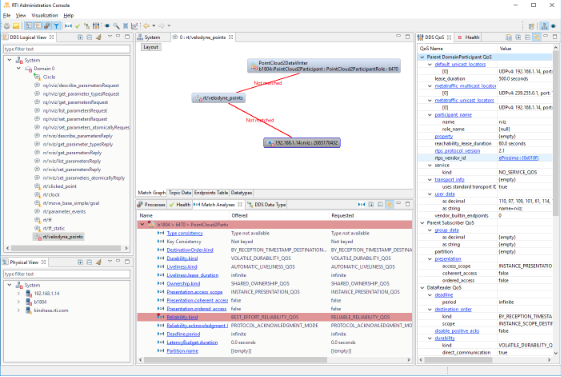 私の発行元は「ベストエフォート」の信頼性を提供していますが、RVizサブスクライバーは「信頼できる」接続。 DDSは、この不一致の継続を許可するのではなく、接続を拒否し、不一致が見過ごされ続けるのを防ぎます。
私の発行元は「ベストエフォート」の信頼性を提供していますが、RVizサブスクライバーは「信頼できる」接続。 DDSは、この不一致の継続を許可するのではなく、接続を拒否し、不一致が見過ごされ続けるのを防ぎます。このQoSの不一致は、管理コンソールによって、 ROS2の通常は隠されているすべての内部トピックを含む、このROS2DDSネットワークの他のすべての参加者。一目でそれを判断できます:
- いくつかのエラーログエントリがあります–後でそれらを確認します。
- 「ライターのみ」と「リーダーのみ」のトピックがいくつかあります。これらは、トピックを公開またはサブスクライブできるトピックですが、現時点では補完的なサブスクライバーまたはパブリッシャーはありません。
- このシステムは、さまざまなDDSベンダーのRMWレイヤーを組み合わせて実行しています。これは問題ではありません。 DDSは、マルチベンダーの相互運用性のために設計されました。
- Connext RMWレイヤーで実行する場合、タイプコード情報はDDS検出トラフィックに含まれ、管理コンソールで簡単に表示できます。
他のRMWレイヤーを使用する場合、この情報は抑制されます。
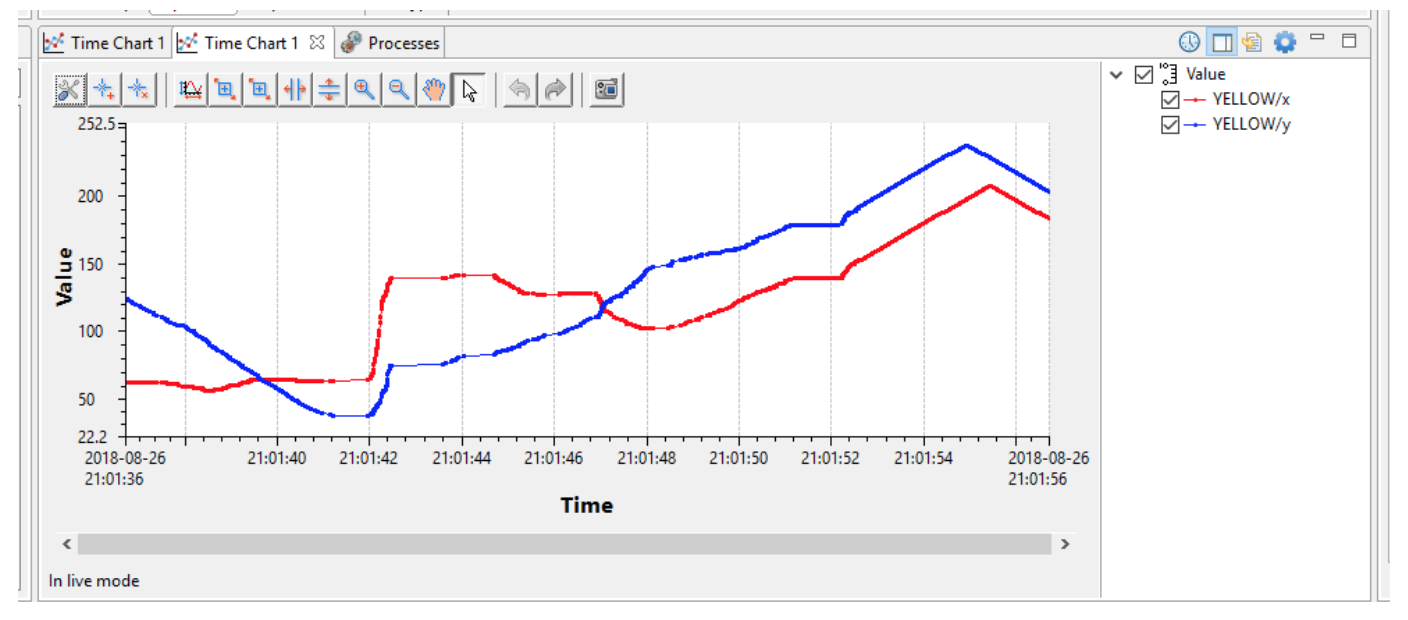
管理コンソールは、データトピックをサブスクライブして、データ値を印刷または視覚化することもできます:
管理コンソールの助けを借りて、データ転送を妨げているQoSの不一致を特定し、数分でシステムを稼働させることができました。
ROS / ROS2システムを拡張、診断、最適化し、純粋なDDSシステムに強化された3D視覚化を提供するために、ROS2 / DDSエコシステムの組み合わせの力を強調するブログ投稿をもっと読む。
ROS2 + DDS:相互運用性のフィールドガイド
ROS2 + DDS Play It Again
ROS 2とDDS:相互運用性が次世代ロボティクスを推進
モノのインターネットテクノロジー
- オープンDDSとRTIDDSソフトウェア
- RTIでのソフトウェアテスト
- Connext 6:利用可能になりました!
- ROS2 + DDS:もう一度再生する
- ROS2 + DDS:相互運用性のフィールドガイド
- ConnextDDSの最新のRTIパフォーマンスを発表
- QtとDDSをIoTアプリケーションに統合する方法
- AUTOSAR Adaptive Platform 18.03:DDSを搭載しました!
- 誰もが自動運転車にRTIConnextDDSを使用している理由はここにあります
- Pythonを使用したConnextDDS用のRTIラボとコネクタの紹介
- IIoTシステムへの5G統合がインダストリー4.0の採用を加速