


触覚センサーの動作とそのタイプ
WSG-DSAは、把持中の高解像度プロファイルフィードバックのための触覚センシングを統合したグリッパーフィンガーです。センシングの目的で、DSA9205iインテリジェント触覚トランスデューサーを使用します。 WSGのベースジョーの上部に収まり、ベースジョー内の統合センサーポートを介してグリッパーコントローラーと直接接続されるため、ハンドリングアプリケーションに触覚デバイスを含めるために外部コンポーネントやケーブルは必要ありません。これらのタイプの指センサーは、WSGによって自動的に検出され、パラメーター化されます。圧力プロファイルは、強力なスクリプトインターフェイスを使用して、グリッパーコントローラーの内側から使用できます。この記事では、触覚センサーの種類とその動作について説明します。
触覚センサーとは何ですか?
触覚センサーはデバイスです。これは、環境との物理的な相互作用に応じて、今後の情報を測定します。人間の触覚は、一般的にモデル化されています。つまり、皮膚感覚と運動感覚です。皮膚接触には、機械的刺激、痛み、および温度から生じる刺激を検出する機能があります。運動感覚は、筋肉、腱、関節の内部にある受容体からセンサー入力を受け取ります。

触覚センサーの種類
以下に示すさまざまなタイプの触覚センサーがあります
- 力/トルクセンサー
- 動的センサー
- 熱センサー
力/トルクセンサー
力/トルクセンサーは、力制御の情報を提供するために触覚アレイと組み合わせて使用されます。これらのタイプのセンサーは、マニピュレーターの遠位リンクのようにどこでも負荷を感知でき、皮膚センサーとして拘束されます。皮膚センサーは一般に、より高い帯域幅でより正確な力の測定を提供します。マニピュレータリンクが一般的に定義され、信号点の接触が想定される場合、力/トルクセンサーは、力とモーメントの接触位置に関する情報を提供できます。これは、固有の触覚センシングと呼ばれます。トルクセンサーの画像を以下に示します。

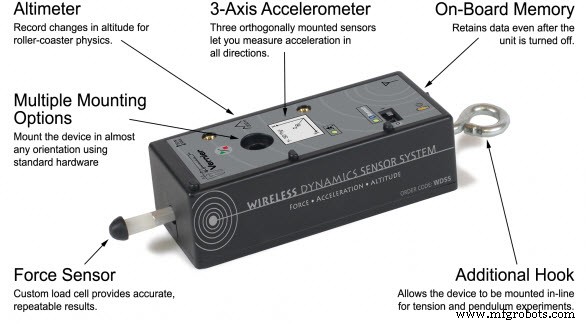
動的センサー
動的センサーは、指のストリップまたはロボットの指の皮膚にある小さな加速度計です。人間のパチニ小体のような一般的な機能は、同じように大きなそれぞれのフィールドを持っています。したがって、指全体には1つまたは2つのスキン加速度計で十分です。これらのセンサーは、接触の形成と破壊、テクスチャ表面上でのスライドに関連する振動を効果的に検出します。
ストレス率センサーは、動的触覚センサーの2番目のタイプです。指先が表面の全体的に小さな隆起またはくぼみの数cm / sの速度でスライドしている場合、皮膚の一時的な変化が重要になりました。 PVDFなどの圧電ポリマーは、損傷に応答して電荷を生成します。この電荷は、変化の範囲に正比例する電流を生成するために適用できます。
熱センサー
熱センサーは、作成されたオブジェクトの素材を識別する人間の能力にとって重要ですが、ロボット工学でも使用されるものもあります。熱検知には、物体の温度と熱伝導率の両方に対応する皮膚の温度勾配の検出が含まれます。ロボット熱センサーは、サーミスタと組み合わせてペルチェ接合に関与しています。

触覚センサーの動作原理と回路図
触覚センサーは、遠隔操作マニピュレーターやインテリジェントロボットに触覚センシング機能を提供するために開発されました。触覚センサーは、力制御と触覚画像を魅了し、物体認識を生成するために、触覚ピクセルに加えられた垂直力を識別できます。ただし、触覚画像と垂直抗力を取得するには、力の制御とスライドの防止に接線方向の情報が重要であり、タスクの成功に魅了されます。したがって、3次元の触覚センサーが必要です。
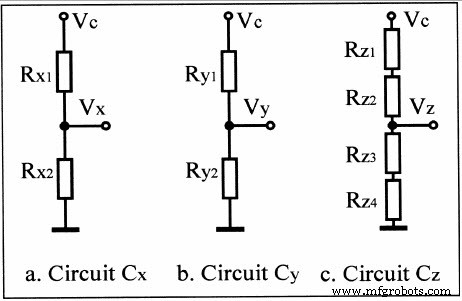
ピエゾ抵抗、静電容量、およびオプションのセンシング要素を使用して開発された3次元触覚センサーがいくつかあり、これらの触覚センサーはMEMSテクノロジーによって製造されています。統合されたセンシング要素と前処理回路はコンパクト化のためのものですが、これらは弱すぎて、ほとんどのアプリケーションでは簡単に壊れてしまいます。また、たとえば、触覚センサーの力の範囲はわずか0.01 N w4xであり、他の触覚センサーはMEMSテクノロジーによって提供されません。下の回路図は、触覚センサー回路を示しています。
ロボット工学の触覚センサー
NASAロボットで使用されている触覚センサーを以下に示します
- 惑星探査に直接関連する例の1つ。
- NASAは、国際宇宙ステーションでこれらのセンサーを使用して、人間が環境内で修理/保守を行うのを支援しています
- NASAは、初期段階にあるロボット工学で多くの触覚センサーを試しました。彼らはフォースセンシング抵抗器を使用しており、現在、量子トンネル複合材料が使用されています
- 複数のロードボタンとセルは、産業用ロボットによって生成される触覚センサーを開発するために実践されています
触覚センサーアプリケーション
触覚センサーアプリケーションはで使用されます
- ロボット工学
- コンピューターハードウェア
- セキュリティシステム
- 携帯電話のタッチスクリーンデバイス
- コンピューティング
触覚センサーの利点
触覚センサーの利点を以下に示します:
- 使いやすい触覚センサーソリューションを提供します
- 触覚センサーには外部コンポーネントやケーブルはありません
- コンパクト抽出
- ロボット工学から検証された触覚センシング技術。
これは、触覚センサーの動作原理とアプリケーションに関するものです。提供された情報が、プロジェクトの優れた情報と理解を提供するのに役立つことを願っています。さらに、電気および電子プロジェクトに関するこの概念について質問がある場合は、以下のセクションでコメントできます。ここにあなたへの質問があります–触覚センサーの機能は何ですか?
写真クレジット:
- 触覚センサーのSquarespace
- 力/トルクセンサーのトランスデューサー技術
- ダイナミックセンサーバーニア
- 熱センサー画像-amazon
センサー