


分割フィードバックのアナロジー
分割されたフィードバック増幅器回路を理解するための有用なアナロジーは、レバーの端の相対運動が入力電圧と出力電圧の変化を表し、支点(ピボットポイント)が実際または仮想の接地点の位置を表す機械式レバーの例です。
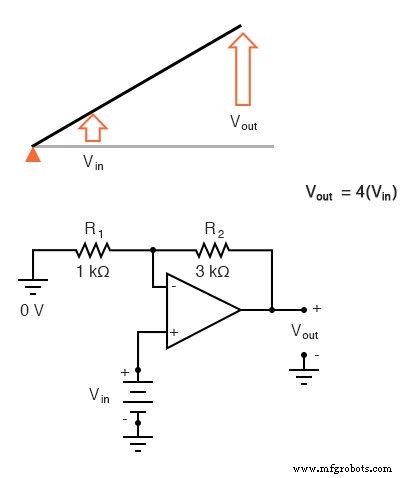
たとえば、次の非反転オペアンプ回路を考えてみましょう。前のセクションから、非反転増幅器構成の電圧利得が1を下回ることは決してないことがわかっています(1)。アンプの回路図の横にレバー図を描き、支点とレバーの端の間の距離が抵抗値を表す場合、レバーの動きはアンプの入力端子と出力端子の電圧の変化を示します。
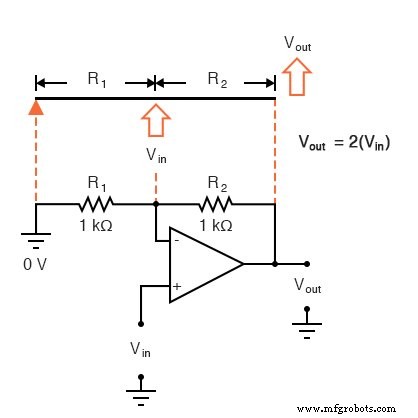
物理学者は、このタイプのレバーを、支点と出力(負荷)の間に入力力(努力)が加えられた、サードクラスと呼んでいます。 レバー。これは、少なくとも入力変位と同じ大きさの出力変位(モーション)(少なくとも1の「ゲイン」)と同じ方向を特徴としています。このオペアンプ回路に正の入力電圧を印加することは、レバーの「入力」ポイントを上に移動することに似ています。
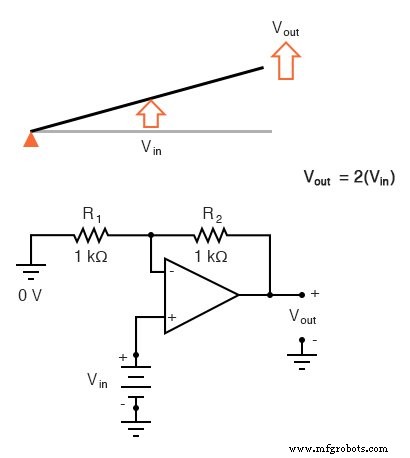
レバーの変位増幅特性により、「出力」ポイントは2回移動します。 「入力」ポイントまで、同じ方向に。電子回路では、出力電圧は入力の2倍に等しく、同じ極性になります。負の入力電圧を印加することは、レバーをそのレベルの「ゼロ」位置から下に動かすことに似ており、結果として出力変位も負になります。
抵抗比R 2 を変更すると / R 1 、オペアンプ回路のゲインを変更します。レバーの用語では、これは支点とレバーの端に対して入力ポイントを移動することを意味し、同様に機械の変位の「ゲイン」を変更します。
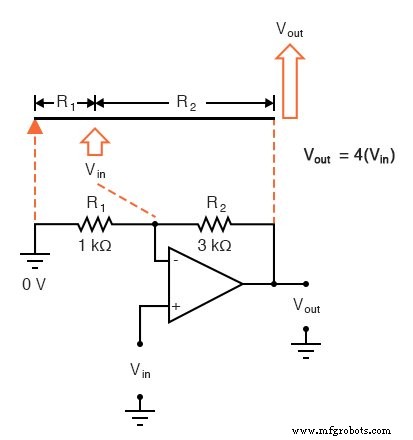
これで、入力信号は2倍ではなく4倍に増幅されます。
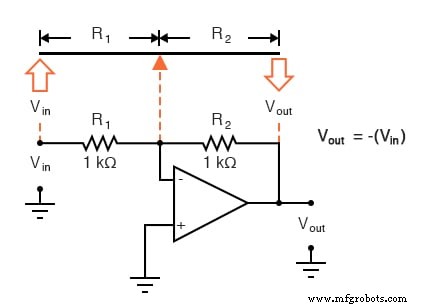
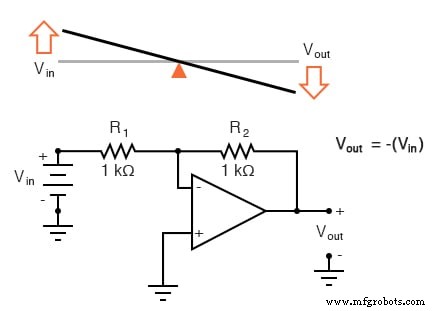
反転オペアンプ回路は、レバーの例えを使用してモデル化することもできます。反転構成では、フィードバック分圧器の接地点は、入力が左側、出力が右側のオペアンプの反転入力です。これは、ファーストクラスと機械的に同等です。 レバー。入力力(力)は、支点の出力(負荷)とは反対側にあります。
等しい値の抵抗(支点の両側にある同じ長さのレバー)を使用すると、出力電圧(変位)の大きさは入力電圧(変位)と等しくなりますが、極性(方向)は逆になります。正の入力は負の出力になります:
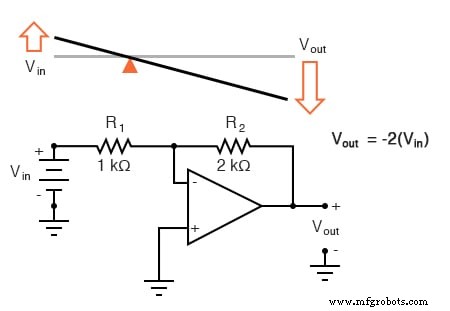
抵抗比の変更R 2 / R 1 レバーの支点位置を変更すると、その機械的変位の「ゲイン」が変化するのと同じように、アンプ回路のゲインが変化します。次の例を考えてみましょう。ここで、R 2 R 1 の2倍の大きさになります :
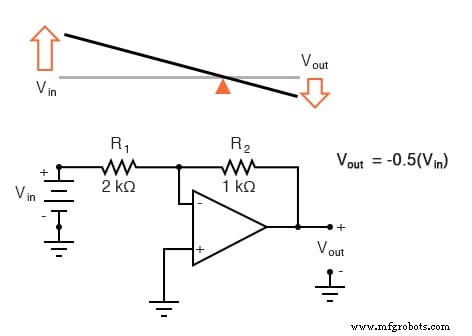
ただし、反転増幅器構成では、1未満のゲインが可能です。ファーストクラスのレバー。 R 2 を逆にする およびR 1 値は、支点をレバー上の補完的な位置(出力端から3分の1)に移動するのに似ています。そこでは、出力変位は入力変位の半分になります:
産業技術