


Arduino Powered Weather Balloon Datalogger
コンポーネントと消耗品
>  |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
必要なツールとマシン
>  |
| |||
| |
|
アプリとオンラインサービス
| > |
|
このプロジェクトについて
こんにちは、みなさん!!あなたはおそらく疑問に思っているでしょう、待ってください、あなたはArduinoを宇宙に送ることができますか?ほとんど。気球を使って、Arduino、カメラ、ガーリックブレッドなど、宇宙への3分の1の距離に送ることができます。宇宙への道の3分の1ですが、大気の99%近くが存在しないため、「宇宙の端」と呼んでいます。このガイドは非常に長いですが、このプロジェクトをチェックアウトするだけでない限り、パス1まですべてを読んでください。とにかく、これを行う方法を見ていきましょう。
必要なものとスキルレベルに基づいて、3つのパスをたどることができます。 成層圏では信じられないほどの風が吹くため、3つの経路すべてにはんだ付けのスキルが必要になります。いずれにせよ、それぞれのパスは他のパスよりも優れているわけではなく、興味のあることに基づいています。すぐにそれらを調べてみましょう。
パス1:はんだ付けのスキルがほとんどなく、プロトボード、さまざまなセンサーを使用して簡単なデータロガーを作成します。
パス2:事前に設計されたPCBシールド(プリント回路基板)を使用して、私たちが設計およびテストした、すっきりとした見栄えの良い基板を作成します。
パス3:プログラムで独自のPCBを作成します。このガイドでは、独自のPCBを設計および作成する方法については詳しく説明しませんが、いくつかのガイドラインについて説明します。私はあなたが学ぶためにいくつかの素晴らしいガイドをリンクすることを確認します。
各パスについてもう少し詳しく説明しますが、選択に役立つヒントをいくつか紹介します。
パス1が最も簡単で、ある程度の柔軟性があります。ボード上のセンサー、ボード、および機能を選択できます。飛行中にすべてが一緒にとどまるようにするには、はんだ付けのスキルが必要になります。
パス2が最も制限されます。つまり、特定のセンサーセット、特定のArduinoボードを使用する必要がありますが、はんだ付けやコーディングについて心配する必要がなく、非常にきれいなPCBが得られます。 PCBについて学び始めます。ガーバーファイル、エクスポート設定、およびコードを提供します。 PCBはそれほど高価ではなく、どこから入手するかによって異なります。これらのPCBを5つ$ 2で入手しましたが、この価格は購入元によって異なる場合があります。
パス3は最も難しく、多くのスキルが必要になります。独自のPCBまたはArduinoPCBシールドの作成方法、全体のコーディング方法、およびボードのはんだ付け方法を知る(または学ぶ)必要があります。これらすべてのことを行う方法を知っている場合は、おそらくこのプロジェクトを自分で行うことができますが、このガイドが役立つ非常に重要な制限と詳細がいくつかあります。
わかった!!素晴らしい!今通過したいパスを選択する必要があります!しかし、すぐにジャンプする前に、覚えておく必要のある非常に重要なルールがあります。 お住まいの地域によっては、気球での発送が制限される場合がありますので、必ずお読みください。 このガイドでは、適切なバルーンの選択方法、ペイロードベイの構築方法、およびバルーンの充填方法については説明しませんが、これを行う方法についてはガイドがたくさんあるので、それらをリンクします。 Arduinoデータロガーの制限を確認し、FAAの制限についてのリンクを残します(米国にお住まいの場合)。覚えておく必要があることは次のとおりです。
1.ペイロードベイに携帯電話の信号を含めることはできません。何らかの理由で携帯電話を搭載している場合は、機内モードである必要があります。
2. GPSを使用して気球を見つける場合は、アマチュア無線免許を取得する必要があります(これにはテストと料金が必要です)。
3.ペイロードの重量とサイズの比率が3.0オンス/平方インチを超える場合、ペイロードの総重量は4ポンド未満である必要があります。
4.個々のペイロード/パッケージは6ポンド未満である必要があります。
5.また、ペイロードが2つある場合、ペイロードの総重量は12ポンド未満である必要があります。
これは、米国居住者向けのFAAの完全なガイドラインへのリンクです。
パス1-プロトボード!
設計を開始する前に、覚えておく必要のある考慮事項がいくつかあります。まず、あなたがそこに欲しいもの。提供されている回路図には、単純な温度および湿度センサー、気圧センサー、IMU、およびSDカードモジュールが含まれています。ほとんどのプロジェクトではこれで十分ですが、Arduinoでペイロードベイを見つけたい場合は、GPSモジュールを含める必要があります。いくつかの回復オプションがあります:
1. SPOTGPSモジュール。これらには長所と短所があります。これらは本当に使いやすく、無制限の範囲を持ち(衛星を使用して携帯電話に座標を送信します)、素晴らしいバッテリー寿命を持ち、簡単に入手できます。ただし、それらは高価であり、逆さまには機能せず、信号は厚い物体によってブロックされる可能性があります。
これは私たちが使用した方法ですが、直立状態を維持するためにジンバルを設計して3Dプリントしました。 SPOT 3衛星メッセンジャー(Amazon)をお勧めしますが、これを調べてさまざまなタイプの利点を確認する限り、完全にあなた次第です。

2.APRSラジオ。これは最も信頼性が高く、多くのことができます。モジュールをArduinoに接続して、無線機にデータや座標などを返送させることができます。これにより、正確な高度測定値を取得することもできます。
残念ながら、これは配線図に含まれないため、自分で配線する方法を学ぶ必要があります。さらに、アマチュア無線免許を取得する必要があります。これは、テストを受ける必要があり、少額の料金を支払う必要があります。このライセンスは非常に便利なので、それだけの価値があるかもしれません。 (米国-制限は、住んでいる場所によって異なる場合があります)。
3.携帯電話。この方法は実際には使用しないでください。飛行後に携帯電話を機内モードから解除する方法を見つける必要があるだけでなく、携帯電話自体はおそらく通常のSPOTよりも高価になります。これがリストに載っている理由は、多くの人が携帯電話をバックアップとして使用しているためですが、実際には使用すべきものではありません。
ペイロードをどのように回復するかを決定したので、フライトがどのようになるかを確認する必要があります。 たとえば、Arduinoでパラシュートをリモートで展開したい場合は、その方法を検討する必要があります。また、使用するセンサーを確認する必要があります(温度は-40C(-40F)まで下がる可能性があるため、それを考慮に入れる必要があります。
また、Arduinoにどのように電力を供給したいかについても考えたいと思うでしょう。気温が低いと多くのバッテリーのパフォーマンスが低下するため、重量制限を超えずに快適に保つために、発泡スチロールの箱などの筐体に加えて、大容量の電源が必要になる場合があります。
取得したいデータの種類、カメラを搭載するかどうか、搭載する予定の内容に基づいて、何らかのチェックリストを作成することをお勧めします。また、ペイロードベイを作成し、ペイロードに基づいてデータロガーを設計することもお勧めします。実際に設計する前に、考えて確認することがたくさんあるので、すべてを検討するのに非常に長く注意深い時間をかけるようにしてください。
さて、ここに私たちのルートに行く場合のセンサーの概略図と配線図があります:
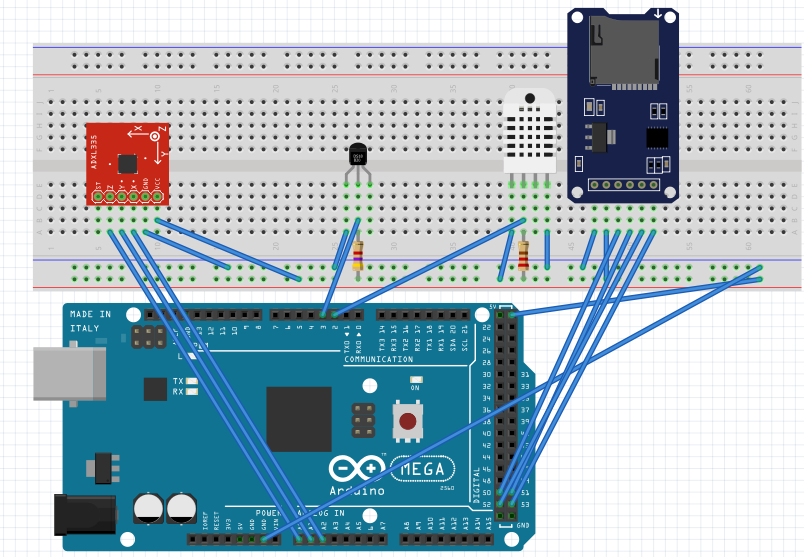
Megaはこれらのセンサーにとって非常にやり過ぎですが、私たちのコードも使用したい場合は、Megaを使用する必要があります。 Nanoのようなものを使用する場合は、MicroSDカードモジュールのピン配列をボードのSPIピンに変更してください。
パーツリストは次のとおりです:
SparkFun ADXL337
ヘッダーピン
マイクロSDカードモジュール
DHT22湿度センサー
DS18B20温度センサー
プロトボード
Arduino Mega
別のDS18B20を追加して内部温度を読み取り、必要なセンサーを追加できますが、提供されているコードを使用する場合は、上の配線図を使用してください。
// DHT22 Setup#include "DHT.h" #define DHTPIN 2#define DHTTYPE DHT22DHT dht(DHTPIN、DHTTYPE); // SD Card Setup#include #include ファイルsdcard_file; int CS_pin =10; // DS18B20温度センサー#include #include #define ONE_WIRE_BUS 3OneWire oneWire(ONE_WIRE_BUS); DallasTemperatureセンサー(&oneWire); int scale =3; // ADXL337の場合は3(±3g)、ADXL377の場合は200(±200g)boolean micro_is_5V =true; // Arduino Unoなどの5Vマイクロコントローラーを使用している場合はtrueに設定し、3.3Vマイクロコントローラーを使用している場合はfalseに設定します。これは、センサーデータの解釈に影響します。 dht.begin(); pinMode(CS_pin、OUTPUT); // CSピンを出力ピンとして宣言if(SD.begin()){Serial.print( "SDカードが見つかりました!"); } else {Serial.print( "SDカードの検索エラー");戻る; } sdcard_file =SD.open( "data.csv"、FILE_WRITE); if(sdcard_file){//ファイルが見つかった場合} else {Serial.print( "SDカードの初期化中にエラーが発生しました"); } sdcard_file.print( "DS18B20"); sdcard_file.print( "、"); sdcard_file.print( "DHT22 Temp"); sdcard_file.print( "、"); sdcard_file.print( "Hum"); sdcard_file.print ( "、"); sdcard_file.print( "H.InX"); sdcard_file.print( "、"); sdcard_file.print( "rawX"); sdcard_file.print( "、"); sdcard_file.print( "rawY "); sdcard_file.print("、 "); sdcard_file.print(" rawZ "); sdcard_file.print("、 "); sdcard_file.print(" scaledX "); sdcard_file.print("、 "); sdcard_file。 print( "scaledY"); sdcard_file.print( "、"); sdcard_file.print( "scaledZ"); sdcard_file.print( "、"); sdcard_file.println( "");} void loop(){delay( 222); //加速度計intrawX =analogRead(A0); int rawY =analogRead(A1); int rawZ =analogRead(A2); float scaledX、scaledY、scaledZ; if(micro_is_5V)//電圧が5Vの場合のスケーリングデータ(それは){scaledX =mapf(rawX、0、675、-scale、scale); scaledY =mapf(rawY、0、675、-scale、scale); scaledZ =mapf(rawZ、0、675、-scale、scale); } else //電圧が3.3Vの場合のスケーリングデータ{scaledX =mapf(rawX、0、1023、-scale、scale); scaledY =mapf(rawY、0、1023、-scale、scale); scaledZ =mapf(rawZ、0、1023、-scale、scale); } // DS18B20 Tempsensors.requestTemperatures(); int etemp =Sensors.getTempCByIndex(0); // DS18B20湿度センサーfloath =dht.readHumidity(); float t =dht.readTemperature(); float f =dht.readTemperature(true); //読み取りが失敗したかどうかを確認し、DHTを早期に終了しますif(isnan(h)|| isnan(t)|| isnan(f)){return; } //華氏で熱指数を計算します(デフォルト)float hif =dht.computeHeatIndex(f、h); //摂氏で熱指数を計算します(isFahreheit =false)float hic =dht.computeHeatIndex(t、h、false); sdcard_file.print(etemp); sdcard_file.print( "、"); sdcard_file.print(t); sdcard_file.print( "、"); sdcard_file.print(h); sdcard_file.print( "、"); sdcard_file.print(hic); sdcard_file.print( "、"); sdcard_file.print(rawX); sdcard_file.print( "、"); sdcard_file.print(rawY); sdcard_file.print( "、"); sdcard_file.print(rawZ); sdcard_file.print( "、"); sdcard_file.print(scaledX); sdcard_file.print( "、"); sdcard_file.print(scaledY); sdcard_file.print( "、"); sdcard_file.print(scaledZ); sdcard_file.print( "、"); sdcard_file.print( ""); sdcard_file.println( ""); sdcard_file.close(); delay(223);} float mapf(float x、float in_min、float in_max、float out_min、float out_max){return(x --in_min)*(out_max --out_min )/(in_max --in_min)+ out_min;} 問題がある場合は、必ず配線を確認し、個々のセンサーのコードを使用して問題を特定してください。 SDまたはMicroSDカードがFAT16またはFAT32にフォーマットされており、16GB以下であることを確認してください。
また、データロガーのステータス表示を表示するためにLEDを配線することをお勧めします。データロガーが実行されていない状態でバルーンを送信したくない場合は、すべてをトリプルチェックしてください。
さらに、SDカードモジュールで問題が発生する場合は、電源を変更してみてください。多くのテストの結果、一部のモジュールは電力に非常に敏感であることがわかったため、信頼できる電源を見つけてください。
どうぞ!データロガーが完成しました。温度、湿度、加速度計のデータを読み取り、SDカードに記録する必要があります。高度を読み取りたい場合は、GPSを使用する必要があります。気圧センサーベースの高度計の90%は、30、000フィートを超えて機能しません。気球がこのしきい値を超えている場合(おそらくそうです)、気圧計を使用できなくなります。残りの部分ですばらしいガイドが必要な場合は、このガイドを確認してください。ご不明な点がございましたら、このWebサイトからお気軽にお問い合わせください。私たちはこれに関して専門家ではありませんが、私たちの能力を最大限に発揮するために喜んでお手伝いします。
以下にコメントするか、問題がある場合はお問い合わせください。ガイドのこの部分を楽しんだ場合は、YouTubeチャンネルをチェックして、コメントを残し、以下に敬意を払ってください。インスピレーションとクールなアイデアについては、他の経路を調べることをお勧めします。
パス2-事前に設計されたPCB
そう!事前に設計されたPCBの使用を計画しています。この事前に設計されたPCBを使用すると、内部温度、外部温度、湿度、および加速度計の読み取り値を取得できます。はんだ付けのスキルとこれらのコンポーネントが必要になります:
5050 SMD LED
SparkFun ADXL337
たくさんのヘッダーピン
マイクロSDカードモジュール
DHT22湿度センサー
2XDS18B20温度センサー
Arduino Mega
Eclipse PCB
PCBのガーバーファイルはこのGitHubリポジトリにあります。 PCB /回路図を編集したい場合は、このWebページにアクセスして、必要なものの詳細を入力してください。ファイルの種類、必要なファイル、質問など。このPCB / Arduinoシールドがどのように機能するか、PCBサービスから正しく注文する方法(わずか2ドル)、および正しく組み立てる方法について説明します。
幸いなことに、私たちは飛行中にこのPCBを使用したので、多くのテストを行い、飛行後に改善を行いましたが、とにかく、それに飛び込みましょう。
また、PCBの組み立てと詳細のビデオもあります。
さて、ガーバーファイルのダウンロードを始めましょう。 GitHubリポジトリに移動し、ZIPファイルをダウンロードして、GerberEclipseファイルをコピーして貼り付けます。オンラインサービスではZIPとして取得されるため、ガーバーのZIPファイルを圧縮しておくことが重要です。
これで、PCBを見つけるための時間が移動しました。検索エンジンで、PCBサービスを検索します。選択できるものはたくさんあり、それらの多くには長所と短所があります。より安い価格で、JLCPCBなどのいくつかの中国の製造会社を検討することをお勧めします。もう少しお金を払っても構わないと思っているなら、米国を拠点とする会社を見たいと思うかもしれません。 購入するサービスは重要ではありません。 それらはすべてあなたに本当に高品質のPCBを素晴らしい価格で提供するので、それは完全にあなた次第です。
サービスを選択したので、zip形式のガーバーファイルをアップロードして、次の設定を選択します。
- レイヤーと寸法はそのままにしておきます
- シングルPCB
- 1.6mmの厚さ
- 任意の色(通常、緑はより速く生成されます)
- 表面仕上げ用のHASL(鉛付き)。鉛フリーはんだを使用している場合は、これを変更する必要があるかもしれません
- 1オンスの銅の重量
- 金の指はなく、本番ファイルの確認
- フライングプローブテストの完全なテスト
- 城壁の穴はありません
- 必要な数量!
これらの設定のほとんどはすでに設定されているので、色を変更するだけです。先に進んで注文すると、PCBが生産を開始します!これは、上記のセンサーを注文する良い機会かもしれません。
次に、PCBを組み立てます。ブレイクアウトボード付きのセンサーを使用しており、このPCBがシールドとして機能するため、これは非常に簡単です。以下にあなたのためのはんだ付けガイドがあります。
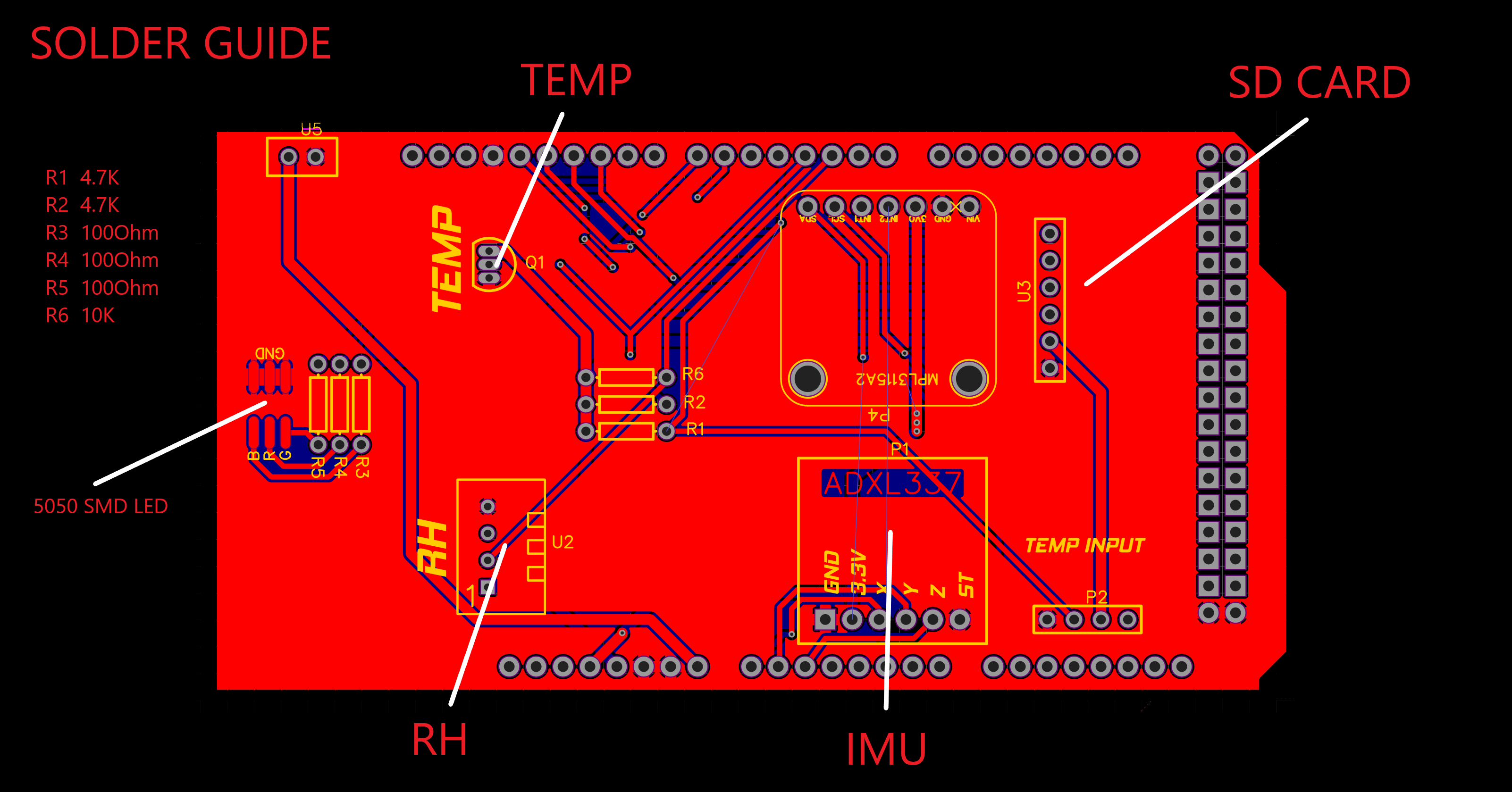
また、すべてのヘッダーピンをPCBの側面にはんだ付けします。これらはArduinoMegaの真上に収まり、すべての配線を行います。
このPCBがどのように機能するかを知ることは、物事が壊れた場合に物事を修正する方法を知ることが重要です。 PCB内には、非常に小さい0.35mmのワイヤが接続されています。これらのワイヤーは、各センサーからPCBの特定のヘッダーピンまで伸び、Arduinoに接続されます。これにより、クリーンなビルドが可能になり、従来のプロトボードやブレッドボードよりも強力で信頼性が高くなります。これは非常に簡単な要約ですが、詳細を知りたい場合は、PCBがどのように機能するかについてのすばらしいビデオをご覧ください。
はい! PCBをはんだ付けし、Arduino Megaに配置して、コンピューターに接続します。 Arduino IDEを開き、PCBファイルを取得したGitHubリポジトリに含まれている1.6コードを開きます。
microSDカードをFAT16またはFAT32にフォーマットします。 microSDカードモジュールは16GB以下である必要があります。そうでない場合は機能しません。 2GBのmicroSDカメラでさえ、2時間のフライトに十分なストレージを備えています。
次に、SDカードをモジュールに挿入し、1.6コードをアップロードします。シリアルモニター内で、SDカードが機能したという成功メッセージが表示され、データロギングがすぐに開始されます。
10秒待ってから、SDカードを取り出してコンピューターに挿入します。すべてのデータを含む.csvファイルがあるはずです!
GitHubリポジトリが機能しない場合のコードは次のとおりです。
// DHT22 Setup#include "DHT.h" #define DHTPIN 2#define DHTTYPE DHT22DHT dht(DHTPIN、DHTTYPE); // SD Card Setup#include #include ファイルsdcard_file; int CS_pin =10; // DS18B20温度センサー#include #include #define ONE_WIRE_BUS 3OneWire oneWire(ONE_WIRE_BUS); DallasTemperatureセンサー(&oneWire); // MPL3115A2 Altimeter Setup#include #include Adafruit_MPL3115A2 baro =Adafruit_MPL3115A2(); int scale =3; boolean micro_is_5V =true; // LEDint Blue =7; int Red =6; int Green =5; void setup() {pinMode(23、INPUT); //スイッチがオンになってSDカードの書き込みを停止し、データセンサーを保存するかどうかを検出します.begin(); pinMode(Blue、OUTPUT); pinMode(Red、OUTPUT); pinMode(Green、OUTPUT); digitalWrite(Green、HIGH ); dht.begin(); pinMode(CS_pin、OUTPUT); // CSピンを出力ピンとして宣言if(SD.begin()){digitalWrite(Green、LOW); digitalWrite(Green、HIGH); digitalWrite(緑、低); digitalWrite(Green、HIGH); digitalWrite(緑、低); digitalWrite(Green、HIGH); } else {digitalWrite(Green、LOW); digitalWrite(赤、高); delay(5000);戻る; } sdcard_file =SD.open( "data.csv"、FILE_WRITE); if(sdcard_file){//ファイルが見つかった場合digitalWrite(Red、LOW); digitalWrite(Blue、LOW); digitalWrite(Green、HIGH); } else {digitalWrite(Green、LOW); digitalWrite(赤、高); delay(1000); digitalWrite(Red、LOW); digitalWrite(Blue、HIGH); delay(1000); digitalWrite(緑、低); digitalWrite(赤、高); delay(1000); digitalWrite(Red、LOW); digitalWrite(Blue、HIGH); delay(1000); digitalWrite(赤、高); digitalWrite(Blue、LOW); } sdcard_file.print( "、"); sdcard_file.print( "DS18B20"); sdcard_file.print( "、"); sdcard_file.print( "DHT22 Temp"); sdcard_file.print( "、"); sdcard_file.print ( "Hum"); sdcard_file.print( "、"); sdcard_file.print( "H.InX"); sdcard_file.print( "、"); sdcard_file.print( "Int。Temp"); sdcard_file.print( "、"); sdcard_file.print( "Pres。Pasc。"); sdcard_file.print( "、"); sdcard_file.print( "alt。"); sdcard_file.print( "、"); sdcard_file.print( " rawX "); sdcard_file.print("、 "); sdcard_file.print(" rawY "); sdcard_file.print("、 "); sdcard_file.print(" rawZ "); sdcard_file.print("、 "); sdcard_file .print( "scaledX"); sdcard_file.print( "、"); sdcard_file.print( "scaledY"); sdcard_file.print( "、"); sdcard_file.print( "scaledZ");} void loop(){ delay(222); digitalWrite(Green、LOW); digitalWrite(Blue、HIGH); if(!baro.begin()){} float pascals =baro.getPressure(); float altm =baro.getAltitude(); float tempC =baro.getTemperature(); //加速度計intrawX =analogRead(A0); int rawY =analogRead(A1); int rawZ =analogRead(A2); float scaledX、scaledY、scaledZ; if(micro_is_5V)//電圧が5Vの場合のスケーリングデータ(それは){scaledX =mapf(rawX、0、675、-scale、scale); scaledY =mapf(rawY、0、675、-scale、scale); scaledZ =mapf(rawZ、0、675、-scale、scale); } else //電圧が3.3Vの場合のスケーリングデータ{scaledX =mapf(rawX、0、1023、-scale、scale); scaledY =mapf(rawY、0、1023、-scale、scale); scaledZ =mapf(rawZ、0、1023、-scale、scale); } // DS18B20 Tempsensors.requestTemperatures(); // DS18B20湿度センサーfloath =dht.readHumidity(); float t =dht.readTemperature(); float f =dht.readTemperature(true); //読み取りが失敗したかどうかを確認し、DHTを早期に終了しますif(isnan(h)|| isnan(t)|| isnan(f)){return; } //華氏で熱指数を計算します(デフォルト)float hif =dht.computeHeatIndex(f、h); //摂氏で熱指数を計算します(isFahreheit =false)float hic =dht.computeHeatIndex(t、h、false); sdcard_file.println(sensors.getTempCByIndex(0)); sdcard_file.print( "、"); sdcard_file.print(t); sdcard_file.print( "、"); sdcard_file.print(h); sdcard_file.print( "、"); sdcard_file.print(hic); sdcard_file.print( "、"); sdcard_file.print(tempC); sdcard_file.print( "、"); sdcard_file.print(pascals); sdcard_file.print( "、"); sdcard_file.print(altm); sdcard_file.print( "、"); sdcard_file.print(rawX); sdcard_file.print( "、"); sdcard_file.print(rawY); sdcard_file.print( "、"); sdcard_file.print(rawZ); sdcard_file.print( "、"); sdcard_file.print(scaledX); sdcard_file.print( "、"); sdcard_file.print(scaledY); sdcard_file.print( "、"); sdcard_file.print(scaledZ); sdcard_file.print( "、"); delay(223); sdcard_file.close();} float mapf(float x、float in_min、float in_max、float out_min、float out_max){return(x --in_min)*(out_max- out_min)/(in_max --in_min)+ out_min;} どうぞ!データロガーが完成しました。温度、湿度、加速度計のデータを読み取り、SDカードに記録する必要があります。高度を読み取りたい場合は、GPSを使用する必要があります。気圧センサーベースの高度計の90%は、30、000フィートを超えて機能しません。気球がこのしきい値を超えている場合(おそらくそうです)、気圧計を使用できなくなります。残りの部分で素晴らしいガイドが必要な場合は、このガイドを確認し、このWebサイトからお気軽にお問い合わせください。ご不明な点がある場合、または当社の設計に基づいてより優れたPCBを作成したい場合。私たちはこれに関して専門家ではありませんが、私たちの能力を最大限に発揮するために喜んでお手伝いします。
以下にコメントするか、問題がある場合はお問い合わせください。ガイドのこの部分を楽しんだ場合は、YouTubeチャンネルをチェックして、コメントを残し、以下に敬意を払ってください。インスピレーションとクールなアイデアについては、他の経路を調べることをお勧めします。
パス3-独自のPCBを作成する
このガイドでは、独自のPCBを作成する方法については説明しません。したがって、先に進む前に、PCBの作成方法を知っているか、その方法を学ぶ必要があります。このパートでは、法律に違反しないようにするための基本的なガイドラインについてのみ説明します。 掲載されているガイドラインは米国向けです。
まず、ブレインストーミングを行い、このフライトから取得したいものを書き留める必要があります。
標準のフライトには次のようなものがあります。
- 温度
- 湿度
- 高度
- 空気の質
- 放射線
- GPS
必要なものは何でも含めることができますが、すべてを確認するようにしてください。温度センサーは、-50C(-58F)まで読み取ることができ、可能な限り正確である必要があります。太陽からの日射により、非常に高い温度では温度の読み取りが不正確になるため、少し見えるようになります。それよりも暖かいです!
また、このことを回復する方法についても考えたいと思うでしょう。オプションの概要は次のとおりです。これについてもっと調べたいと思うかもしれません。
SPOTGPSモジュール。これらには長所と短所があります。これらは本当に使いやすく、無制限の範囲を持ち(衛星を使用して携帯電話に座標を送信します)、素晴らしいバッテリー寿命を持ち、簡単に入手できます。ただし、それらは高価であり、逆さまには機能せず、信号は厚い物体によってブロックされる可能性があります。
これは私たちが使用した方法ですが、直立状態を維持するためにジンバルを設計して3Dプリントしました。 SPOT 3衛星メッセンジャー(Amazon)をお勧めしますが、これを調べてさまざまなタイプの利点を確認する限り、完全にあなた次第です。
2.APRSラジオ。これは最も信頼性が高く、多くのことができます。モジュールをArduinoに接続して、無線機にデータや座標などを返送させることができます。これにより、正確な高度測定値を取得することもできます。
アマチュア無線免許を取得する必要があります。これはテストを受ける必要があり、少額の料金を支払う必要があります。このライセンスは非常に便利なので、それだけの価値があるかもしれません。 (米国-制限は、住んでいる場所によって異なる場合があります)。
3.携帯電話。この方法は実際には使用しないでください。飛行後に携帯電話を機内モードから解除する方法を見つける必要があるだけでなく、携帯電話自体はおそらく通常のSPOTよりも高価になります。これがリストに載っている理由は、多くの人が携帯電話をバックアップとして使用しているためですが、実際には使用すべきものではありません。
これは、設計に役立つ可能性のある指示です。これには多くの制限と考慮する必要があることがありますので、時間をかけてください!
もう1つの設計上の考慮事項は、重量です。このガイドの冒頭で述べたように、ペイロードは、ペイロードタイプに基づいて、12ポンド、6ポンド、または4ポンド未満である必要があります。また、高度の読み取りに気圧計を使用することはできません。これは、それらの大部分が30、000フィートを超えて失敗するためです。
最後の考慮事項はパワーです。 成層圏では気温が非常に低くなります。 バッテリーは故障します。Arduinoも故障する可能性が非常に高くなります。これに対する解決策を見つける必要があります。間違いなく最善の戦略は、データロガーを発泡スチロールの箱の中に閉じ込めることです。これにより、内部の温度が室温と同じくらい高く保たれます。また、ソーラーパネルやハンドウォーマーを検討することもできます。
わかった!あなたはすべてを熟考し、必要なセンサーを再確認し、すべてを書き留めました。回路図とPCBを作成する時が来ました。回路図とPCBの場合、以前のようにPCBシールドを作成するか、完全なPCBを作成することをお勧めします。私はあなたに決めさせます(あなたはこれについていくらか経験を積んでいるはずなので)
PCB /シールドを構築した後、すべてを再確認して、それが機能するかどうかを確認し、ガイドラインに従っていることを確認してください。
どうぞ!データロガーが完成しました。温度、湿度、加速度計のデータを読み取り、SDカードに記録する必要があります。高度を読み取りたい場合は、GPSを使用する必要があります。気圧センサーベースの高度計の90%は、30、000フィートを超えて機能しません。気球がこのしきい値を超えている場合(おそらくそうです)、気圧計を使用できなくなります。残りの部分ですばらしいガイドが必要な場合は、このガイドを確認してください。ご不明な点がございましたら、このWebサイトからお気軽にお問い合わせください。私たちはこれに関して専門家ではありませんが、私たちの能力を最大限に発揮するために喜んでお手伝いします。
以下にコメントするか、問題がある場合はお問い合わせください。ガイドのこの部分を楽しんだ場合は、YouTubeチャンネルをチェックして、コメントを残し、以下に敬意を払ってください。インスピレーションとクールなアイデアについては、他の経路を調べることをお勧めします。
結論
気球は、成層圏に物を送るための本当にクールで簡単な方法です。カメラ(この場合は360°カメラ)を高地に送信し、多くの規制なしに素晴らしい映像とデータを取得できます。しかし、1つ!
これを読んでください!!
すべての規則に従っていることを確認し、レーダーデフレクターを追加して、フライトの前にNOTAM(飛行士への通知)を提出してください。気球のペイロードが飛行機に衝突する可能性は非常に高く、人命を傷つけたり危険にさらしたりしたくはありません。損傷のリスクを減らすためにできる限りのことをし、何も落とさないようにすべてが強いことを確認してください。 FAAにはこれに関する多くの制限はありません。規則に従うだけですべてを制限し、他の人のためにそれを台無しにする必要があるので、それを作らないでください。
とにかく、このガイドがお役に立てば幸いです。このようなガイドを作成することを楽しんでいます。私たちのクラブをサポートしたい場合は、私たちのYouTubeチャンネルへの登録を検討してください。問題や質問がある場合は、コメントするか、お問い合わせください。
ハッピーアルドゥイノイング! (それも用語ですか?)
NMロケットレビュー
カスタムパーツとエンクロージャー
これは、Spot Personal Trackerがフライト中に直立状態を維持するために作成したジンバルの.stlです。SPOTPersonalTrackerを直立状態に維持するために使用したジンバルの.stlファイル 回路図
パス1の場合 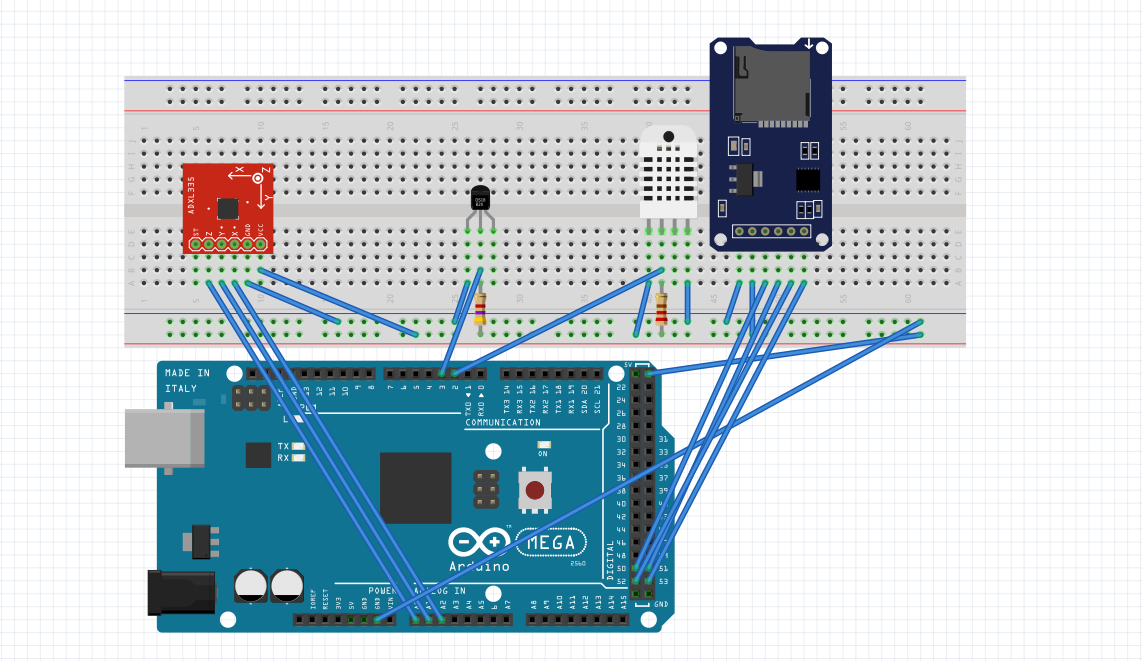 参照用
参照用 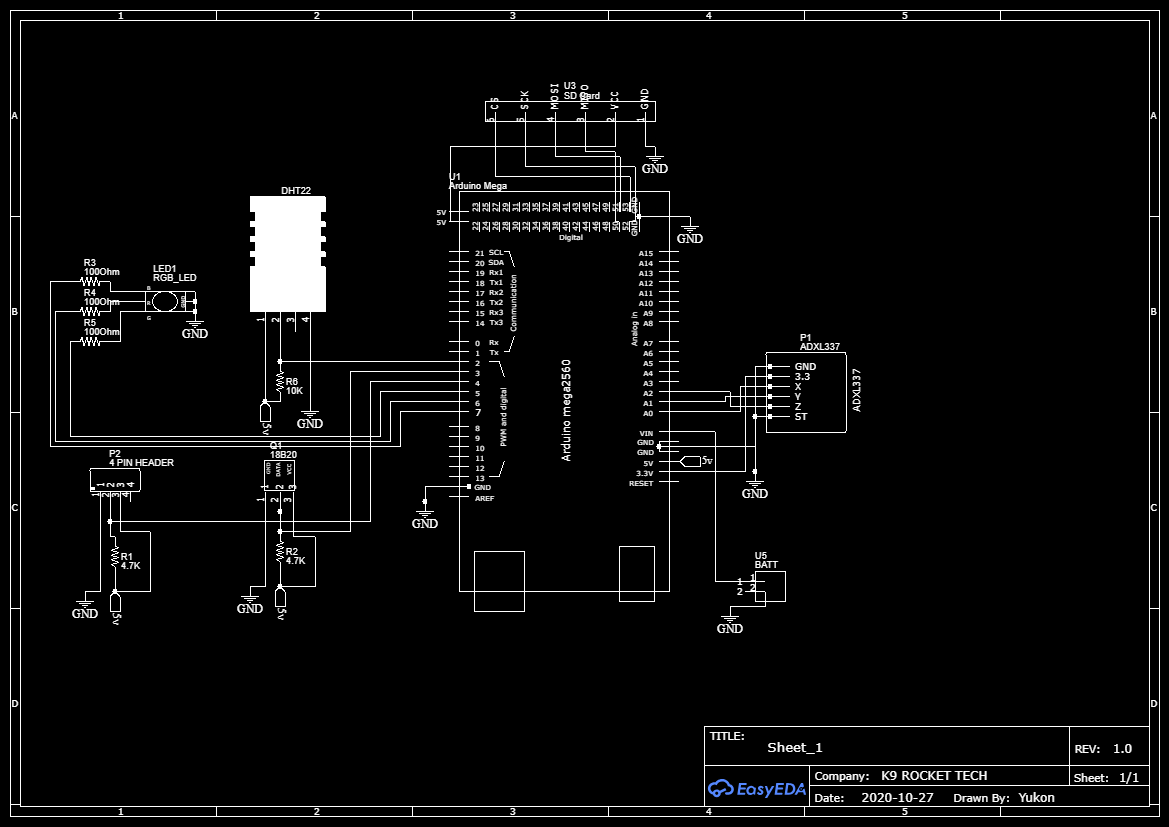
GitHub Repository for PCB files and Code
Use this to download Gerber file for predesigned PCB and the code for it.https://github.com/nmrocketryreviews/HADLdatalogger製造プロセス