


通過側線を備えた自動鉄道模型レイアウト
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
| × | 6 | ||||
 |
| × | 7 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
鉄道模型のレイアウトを作ることは素晴らしい趣味です、それらを自動化することはそれをはるかに良くするでしょう!自動化の利点のいくつかを見てみましょう:
- 低コストの運用: レイアウト全体は、L298Nモータードライバーを使用してArduinoマイクロコントローラーによって制御され、従来の列車制御スロットルやパワーパックと比較してコストはほとんどかかりません。
- ディスプレイに立てるのが理想的: レイアウトを制御するために人の干渉が必要ないため、電車や分岐器を制御するために常に立ち会うことができないディスプレイで使用できます。
- マイクロコントローラー愛好家に最適: Arduinoとプログラミングを始めたい、または始めたいのであれば、これはスキルを練習するための素晴らしいプロジェクトです。
興味があれば、このプロジェクトの以前のバージョンを確認することもできます。これはさらに簡単です。
ですから、これ以上面倒なことはせずに、始めましょう!
ステップ1:プロジェクトの動作を監視する
ステップ2:すべての部品とコンポーネントを入手する <図>
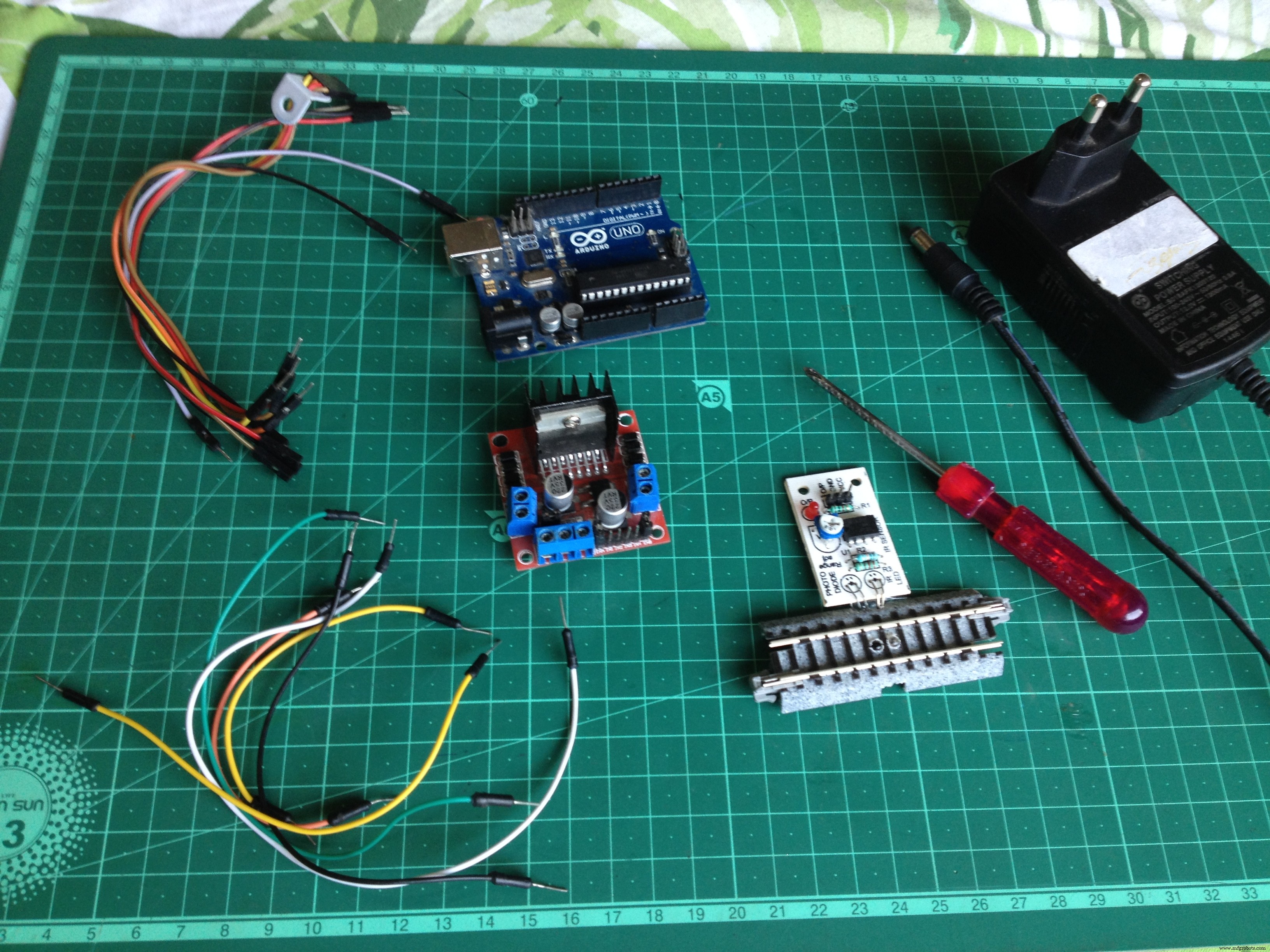
まず、次のすべてが揃っていることを確認してください。
- ArduinoマイクロコントローラーボードであるUNOが推奨されます。
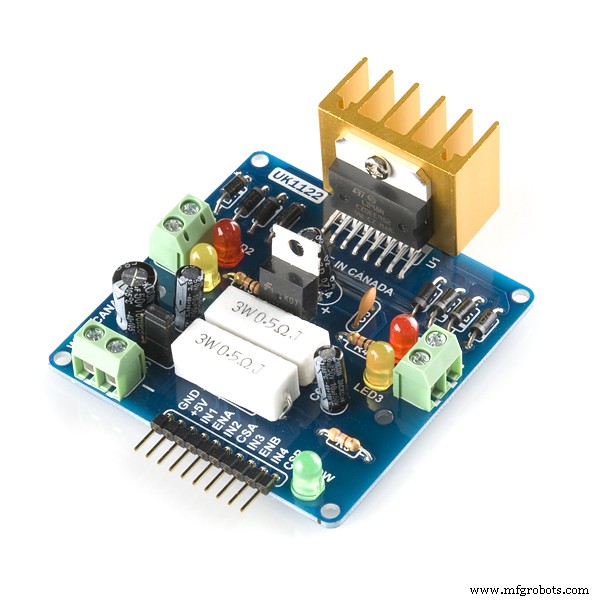
- L298NデュアルHブリッジモータードライバーボード。
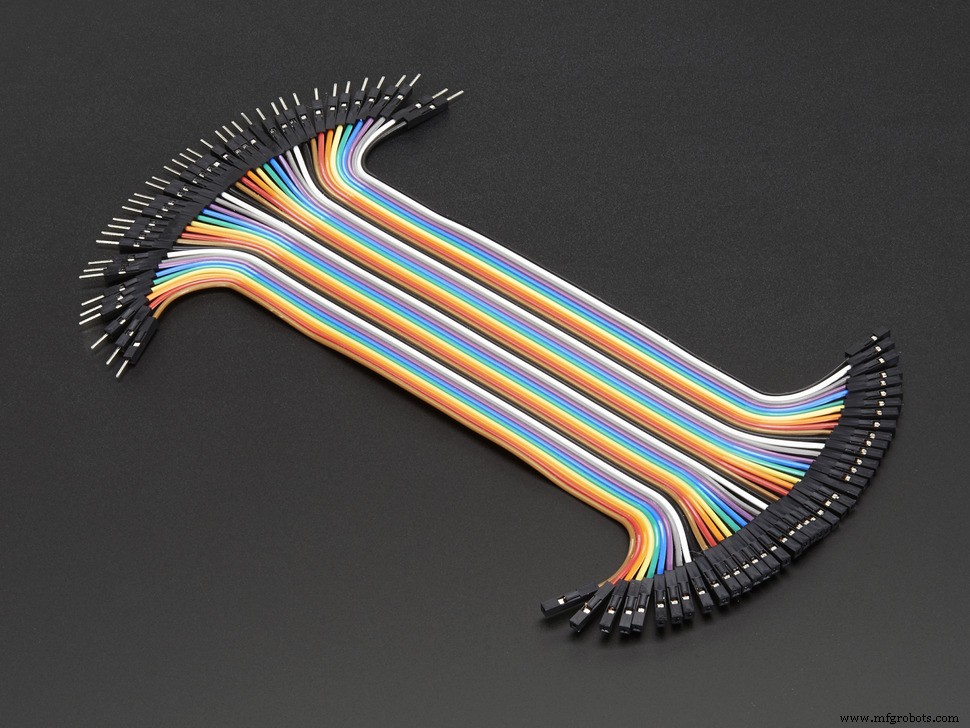
- 6本のオスからオスへのジャンパー線。
- 7本のオスからメスへのジャンパー線。
- ドライバー。
- 12ボルトDC電源アダプター。
- 下側にIR近接センサーが取り付けられたトラックセグメント(加藤S62トラックを使用)
ステップ3:プログラムをArduinoボードにアップロードする
<図>
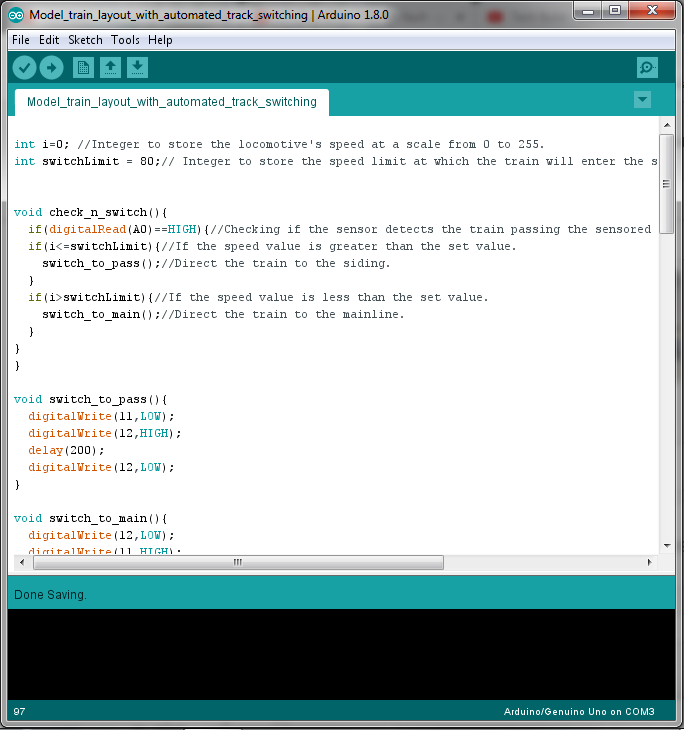
コンピュータにArduinoIDEがない場合は、ここからダウンロードしてください。次に、指定されたファイルをダウンロードして開きます。
Model_train_layout_with_automated_track_switching.ino
ステップ4:トラックを配置してレイアウトを作成する
<図>
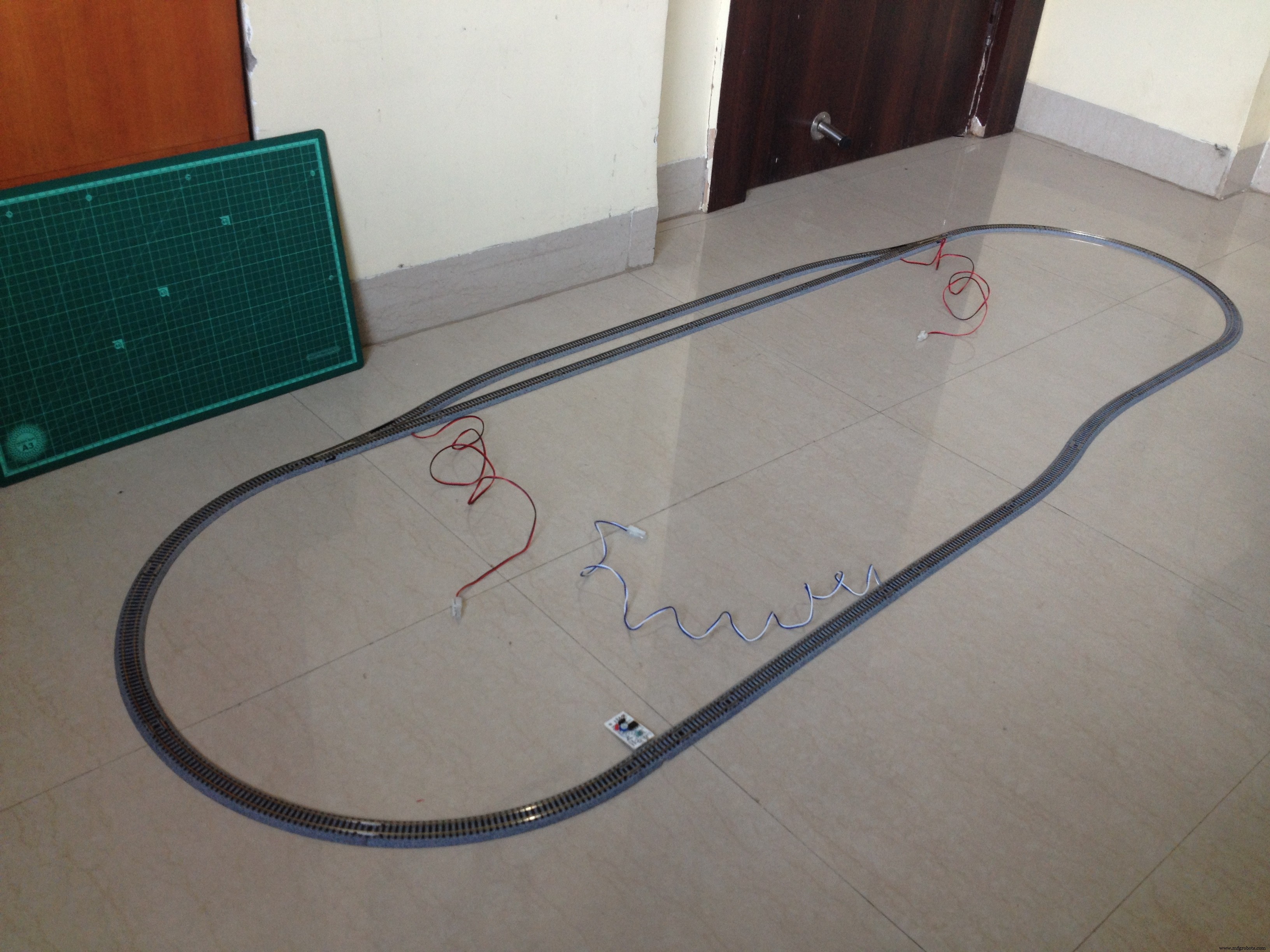
上に示すように、通過する側線を使用して楕円形のループを作成します。センサートラックと、センサートラックを通過した後に列車が交差する最初の分岐点との間の距離が、列車の長さよりも長く、分岐点を通過するときに列車のどの部分もセンサートラックを超えないようにしてください。
>
ステップ5:回路図は常に役立ちます
<図>
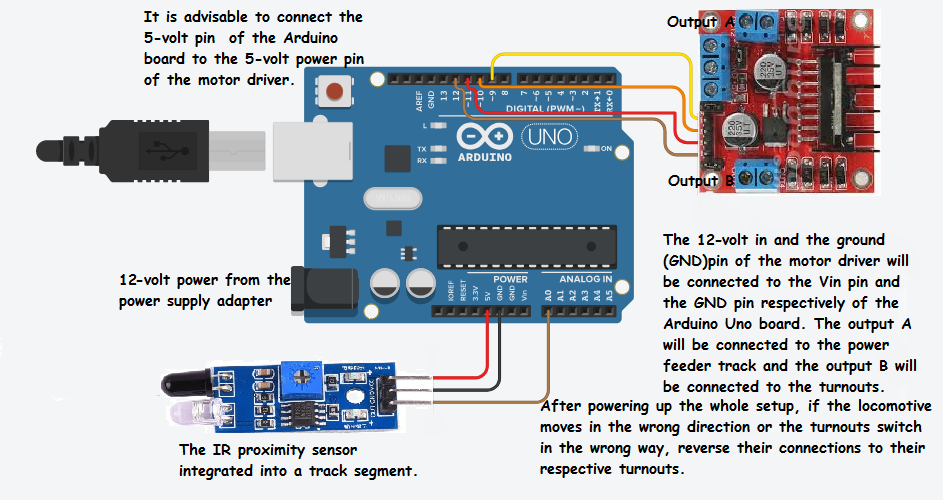
先に進む前に、回路図全体とすべての詳細を確認してください。
ステップ6:分岐器をL298Nドライバーボードの出力に接続します
<図>
<図>
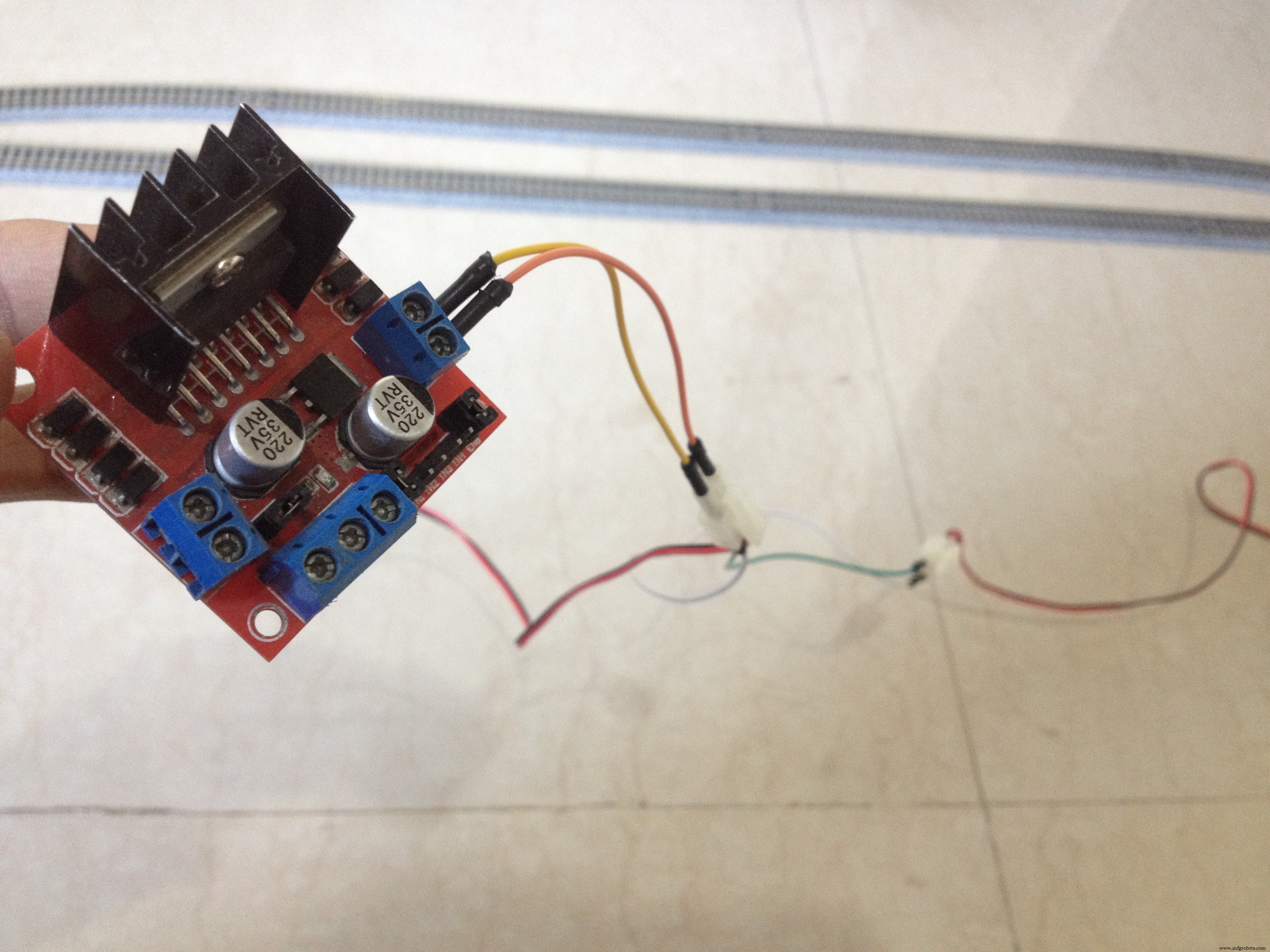
両方の分岐器の赤線と黒線をそれぞれ相互に接続して、並列接続にします。次に、赤い線をout4に接続し、黒い線をモータードライバボードのout3端子に接続します。
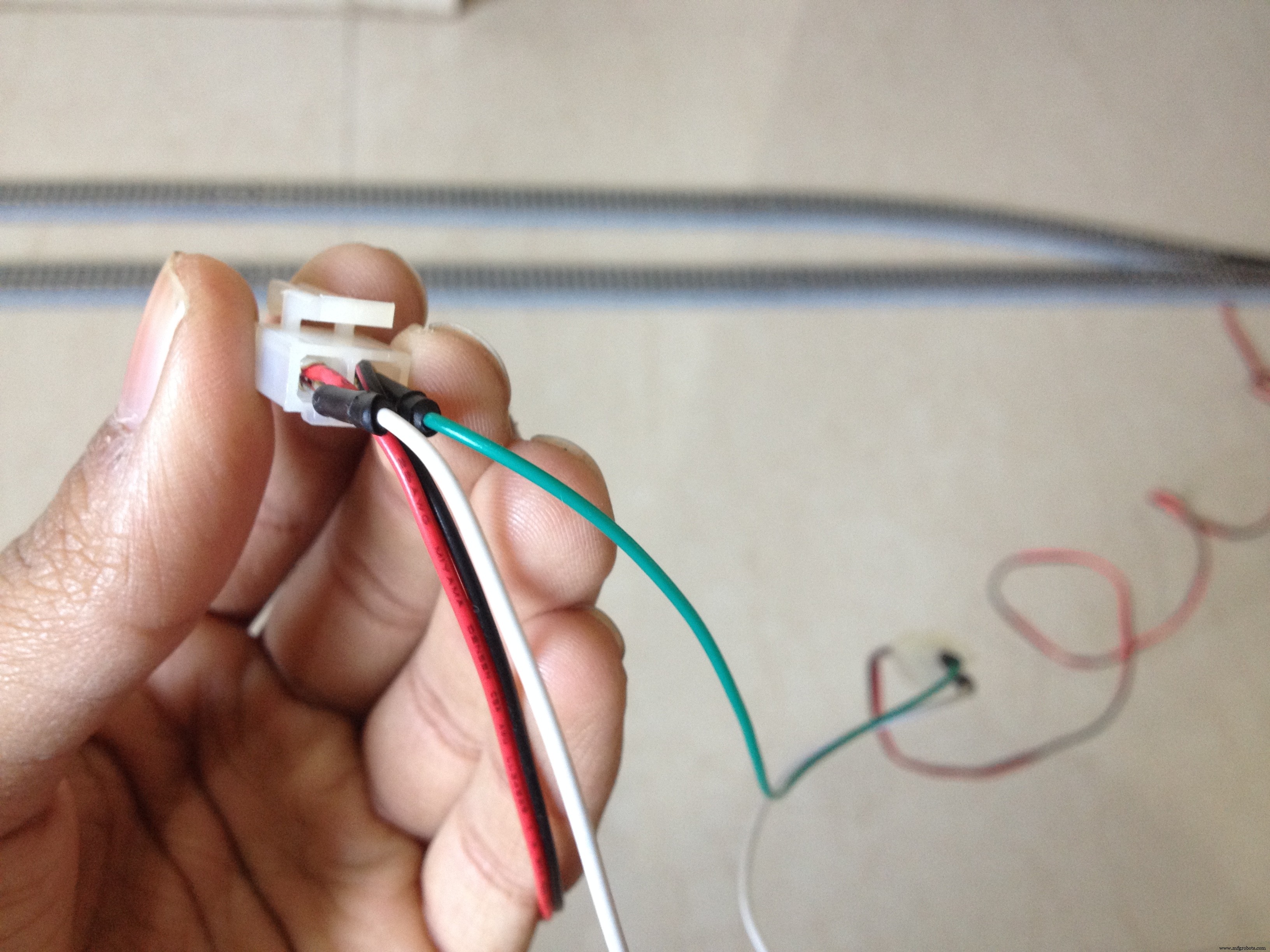
ステップ7:パワーフィーダートラックをL298Nドライバーボードの残りの出力に接続します
<図>
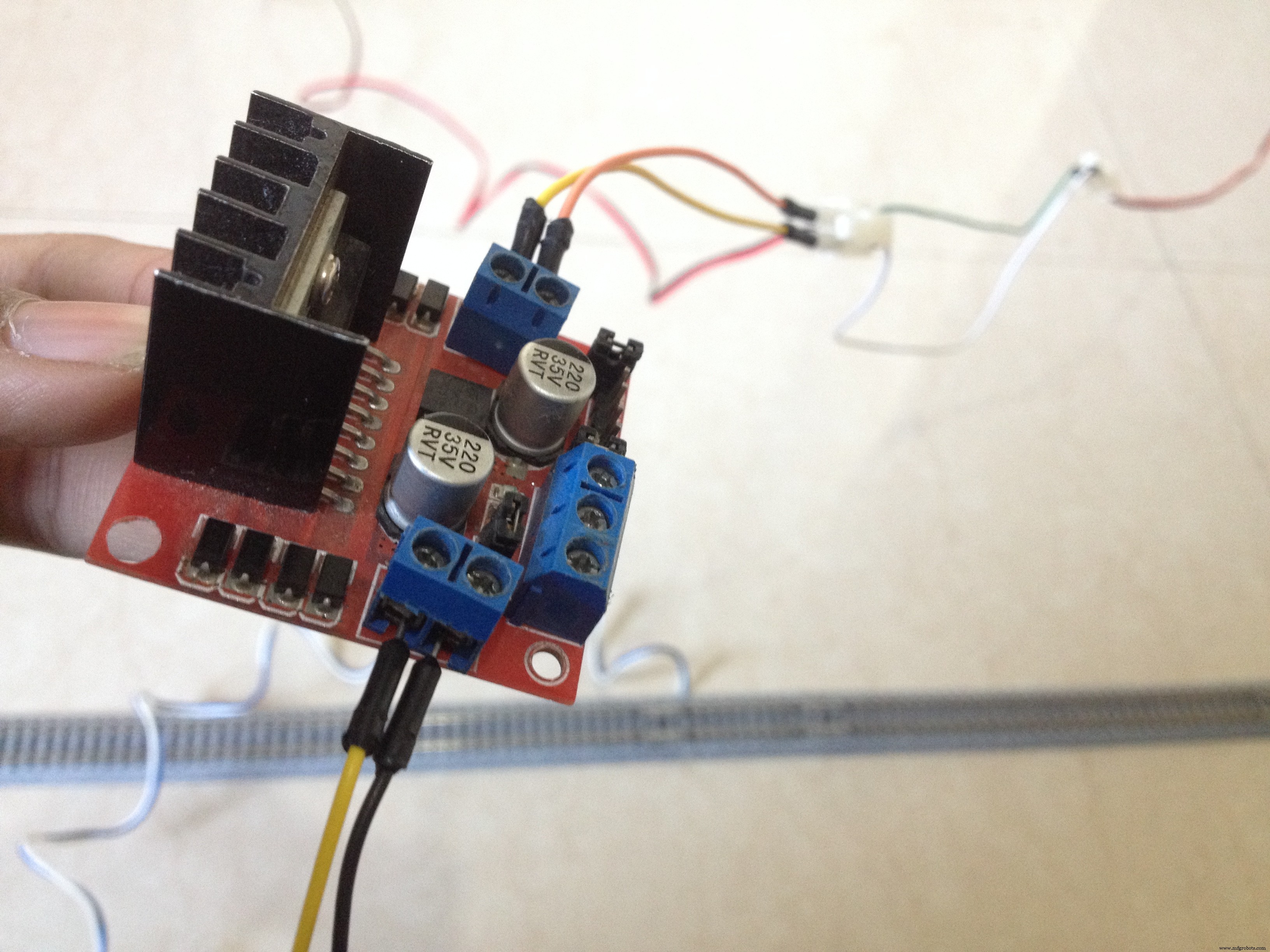
パワーフィーダーの白い線をout1に接続し、青い線をモータードライバーボードのout2端子に接続します。
ステップ8:L298NドライバーボードをArduinoボードの電源ピンに接続します
<図>
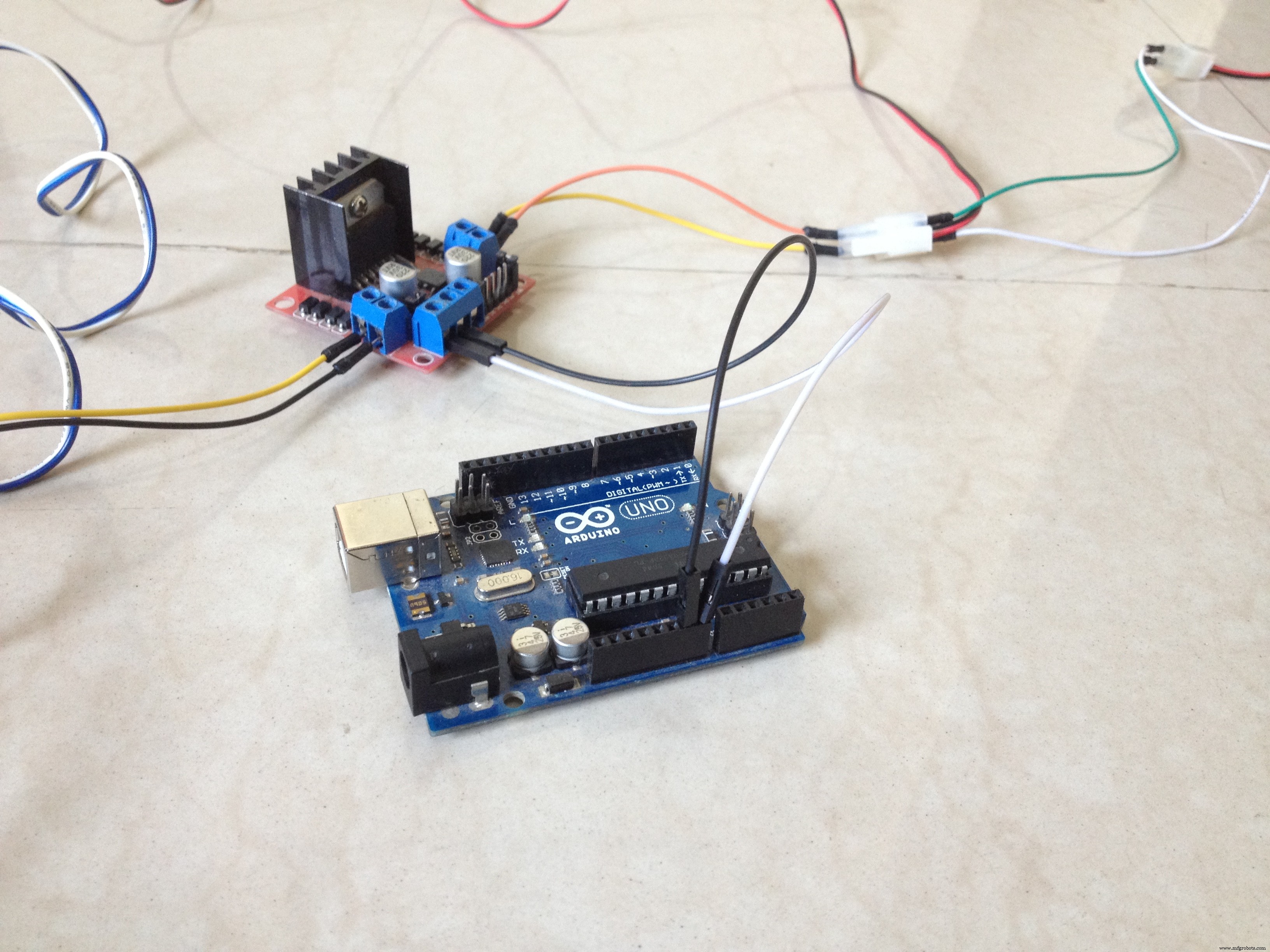
12ボルトのピンをArduinoボードのVINピンに接続し、GNDピンをArduinoボードのGNDピンに接続し、できればモータードライバーの5ボルトのピンをArduinoボードの5ボルトのピンに接続します。
ステップ9:センサーをArduinoボードに接続する
<図>
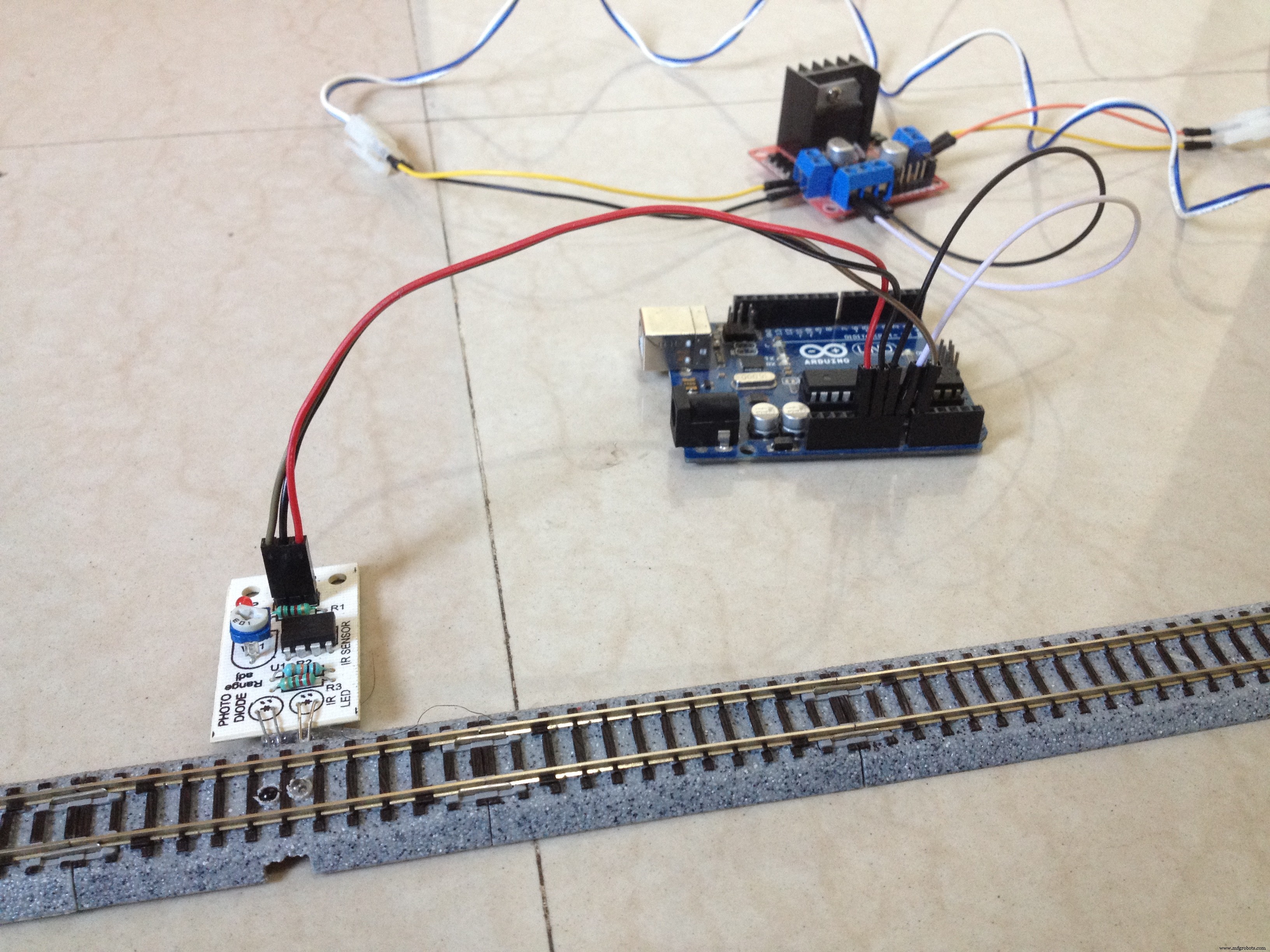
センサーのVCCピンをArduinoボードの5ボルトピンに接続し、GNDピンをArduinoボードのGNDピンに接続し、OUTピンをArduinoボードのA0ピンに接続します。
ステップ10:モータードライバーの入力ピンをArduinoボードに接続します
<図>
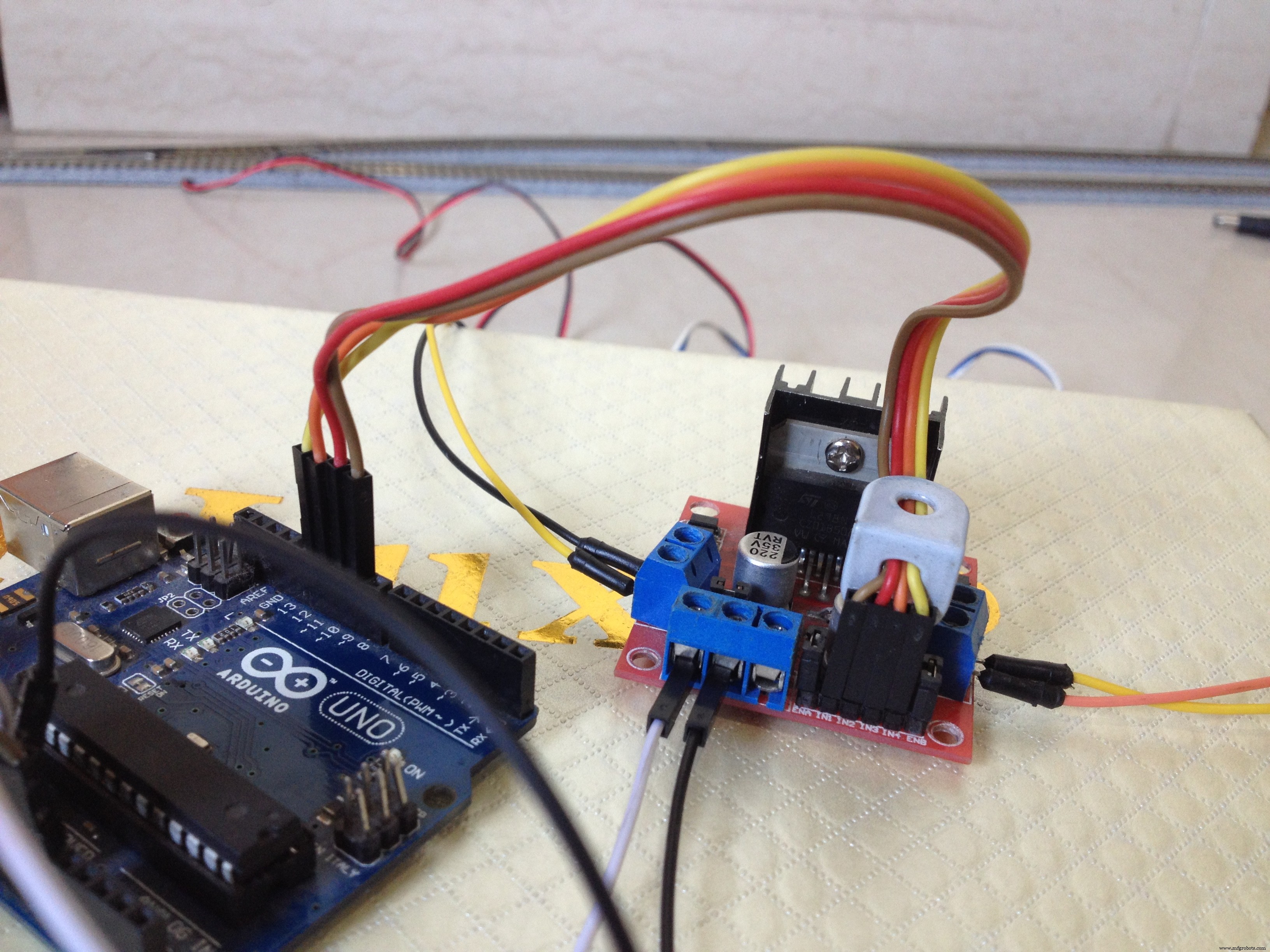
次のように、Arduinoボードのデジタルピンをモータードライバーボードの入力ピンに接続します。
- D9からIN1
- D10からIN2
- D11からIN3
- D12からIN4
ステップ11:列車を線路に乗せる
<図>
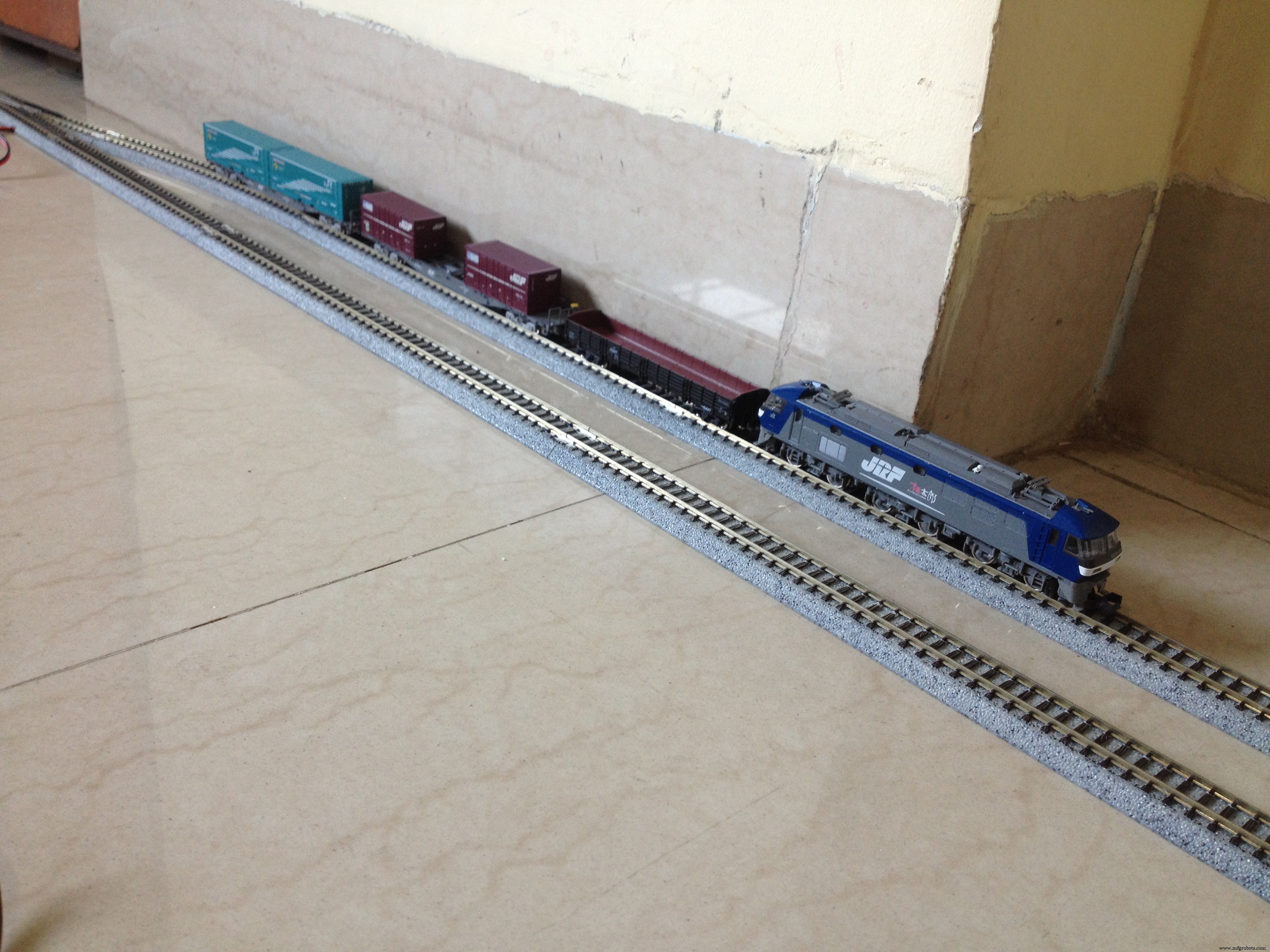
すべての配線接続を確認したら、列車を羽目板に置きます。
ステップ12:セットアップの電源を入れます
<図>
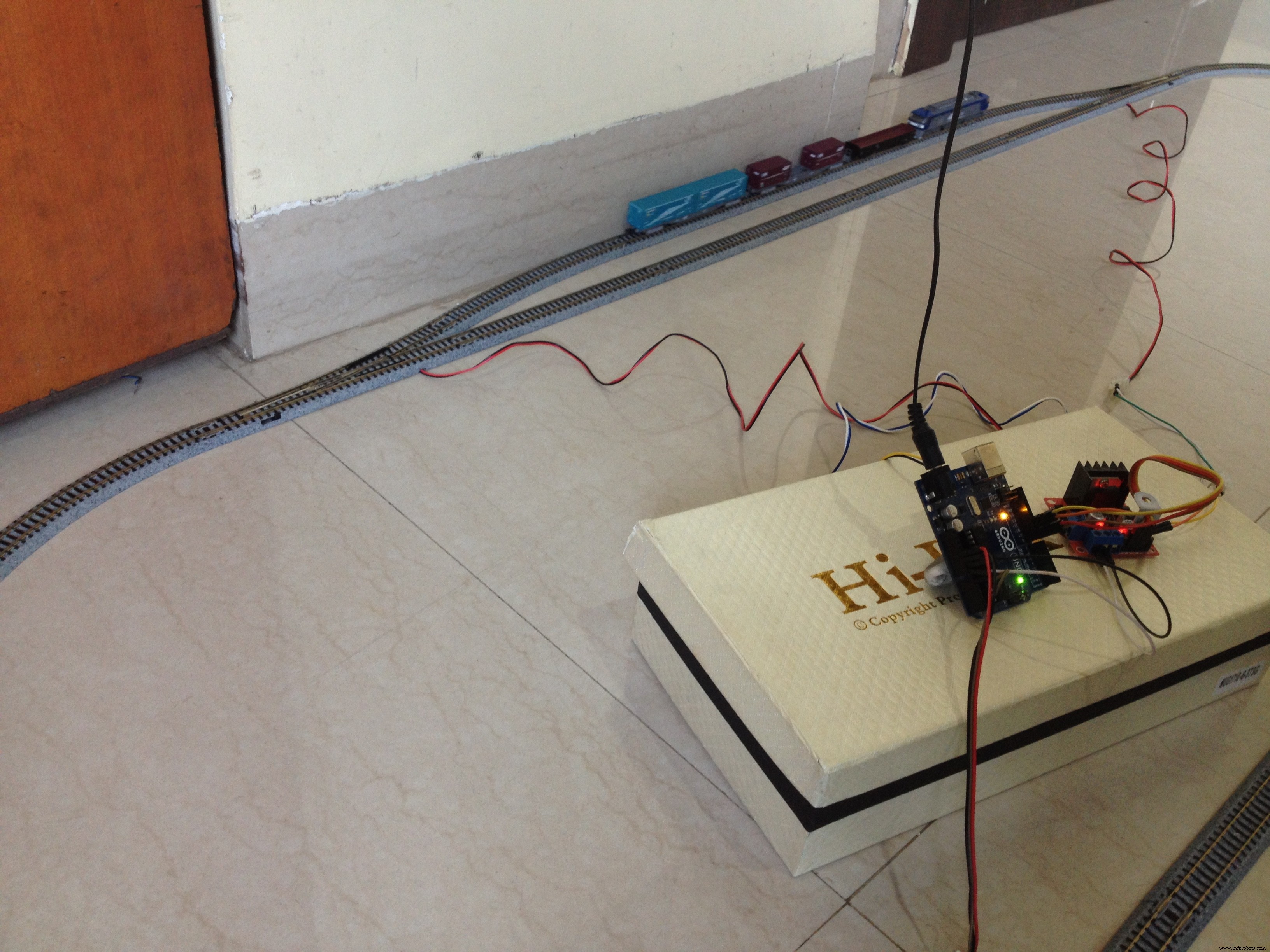
セットアップの電源を入れ、分岐器がサイディングに切り替えられていることを確認します。そうでない場合は、モータードライバーで作成された分岐器の接続を逆にします。また、列車が前進方向に動き始めることを確認してください。列車が間違った方向に動いた場合は、フィーダートラックとモータードライバーの接続を逆にします。
ステップ13:完了です!
今のところ、プロジェクトは完了しています。 Arduinoコードをいじって、レイアウトの機能を変更したり、サイディングを追加したりすることができます。すべてカスタマイズ可能です。このプロジェクトに加えた変更について知りたいです。以下のコメントで教えてください。 最高です!
コード
- Model_train_layout_with_automated_track_switching.ino
Model_train_layout_with_automated_track_switching.ino Arduino
プレビューなし(ダウンロードのみ)。
回路図
回路図面を注意深く確認してください。 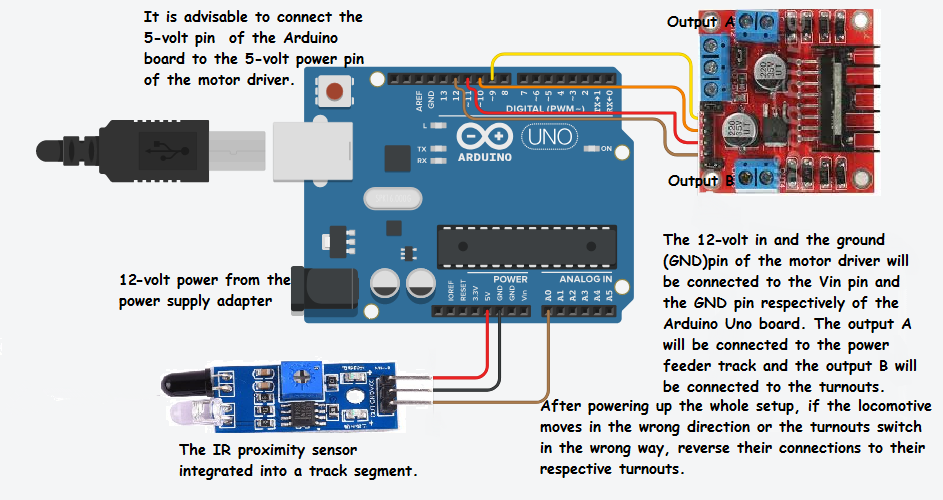
製造プロセス