


慣性と慣性の不一致を理解するための7つのリソース
特定のアプリケーションに最適なモーターのサイズを決定する場合、負荷イナーシャやモーターイナーシャなどの要素が重要な考慮事項になります。 (経由:慣性の不一致の謎を理解する」)
カップリング、シャフト、ベルトなどの機械部品が無限に硬い場合、トルクと速度の要件のみに基づいてモーターのサイズを決定することができます。残念ながら、そうではありません。
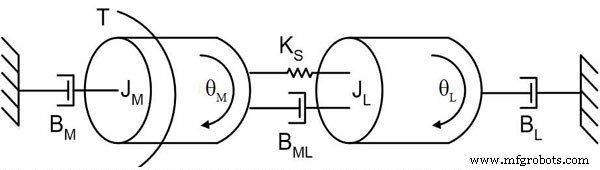
準拠して結合されたモーターと負荷では、モーターのローター慣性など、多くの要因がシステムの機械的共振に影響を与えます(J M )、負荷イナーシャ(J L )、結合弾性(K S )、加えられたトルク(T)、およびカップリングの粘性減衰(B ML )、グラウンドとローターの間(B M )および地面と負荷の間(B L )。図は、ホフストラ大学のKevinCraigの好意によるものです。
これらの機械部品はすべてある程度のコンプライアンスがあります。つまり、モーターが負荷を動かそうとすると、共振周波数で振動が発生します。モーターのサイジングを成功させるには、慣性をある程度理解する必要があるため、いくつかの重要な概念を見てみましょう。
慣性は、速度の変化に対する物理オブジェクトの抵抗です。イナーシャが大きくなると、加速/減速に対する抵抗も大きくなります。負荷慣性は、慣性モーメントとも呼ばれ、回転軸の観点から、速度の変化に対する物理オブジェクトの抵抗として定義されます。 / em> 。
慣性モーメント(通常は J と記述されます )サーボシステムでは、負荷イナーシャとモーターイナーシャの2つの部分に分けることができます。慣性モーメント比は、負荷の慣性モーメントをモーターの慣性モーメントで割ったものです。慣性の不一致とは、モーターと負荷の間の物理的な慣性の差を指します。
モーターのサイジングを支援するために、モーターメーカーは通常、許容される負荷慣性情報を提供します。許容荷重を超えると、性能の低下、振動、失速につながる可能性があります。
理想的な慣性比を計算する式はないことに注意してください。アプリケーションごとに計算する必要があります。
負荷とモーターの慣性比が高いと、機械の動作帯域幅が減少し、モーターの動作が必要以上に困難になり、多くの場合、整定時間が長くなり、結果として減少します。全体的なパフォーマンス。
慣性比を減らす1つの方法は、ギア比が負荷の慣性に逆二乗の影響を与えるため、ギアボックスを使用することです。これにより、より高速な操作や、より小型で安価なモーターが可能になります。別のアプローチは、より大きな慣性を備えたより大きなモーターに切り替えることです。
さらに、今日の高度なサーボには、共振効果に取り組むために使用できるドライブ制御アルゴリズムが付属しており、特定のアプリケーションでより高い比率のシステムを使用できます。
>
ローターの慣性は、材料、寸法、および設計(ここに示す「車のホイール」の設計など)を変更することで調整できます。クレジット:A3
慣性と慣性の不一致のトピックを調査するための7つの役立つリソースは次のとおりです。
- 慣性の不一致の謎を理解する:A3アーカイブからのこの詳細な記事は、方程式を含むトピックの詳細な内訳を提供します。慣性と結合剛性がどのように組み合わされてサーボ軸の動作が不安定になるか、およびこの問題をどのように解決できるかに焦点を当てています。
- サーボモーターサイジングの基本:Yaskawa Americaの無料のオンラインロボット関連eラーニングモジュールの優れたシリーズには、ピークトルク、RMSトルク、慣性比などのコアモーターサイジングの概念をカバーするこのビデオが含まれています、および速度。
- ロボットアカデミーの慣性ビデオ:クイーンズランド工科大学の無料のオンラインロボットアカデミーでは、さまざまなモーションコントロールとロボット工学のコンテキストで慣性のトピックを探るビデオをいくつか提供しています。
- モーターサイジングの基本:負荷慣性:大手モーターメーカーのオリエンタルモーターによる慣性のトピックへの簡潔なガイド。
- オンライン慣性比計算機:Destacoは、慣性比の計算に役立つように設計された便利なオンラインツールを提供しています。
- 慣性比とその機械性能への影響を理解する:慣性比の基本と、モーターのサイズを決定する際の大まかなルールに従うことの危険性について説明した、三菱電機の優れたホワイトペーパー。
- ステッピングモーターの共振を低減するためのソリューション:モーターを調整したり、負荷イナーシャを変更したりすることで、ステッピングモーターの共振を低減できることをご存知ですか?この記事の詳細については、A3アーカイブをご覧ください。
産業用ロボット
- Renesasは、モーター制御アプリケーション向けにRX24TおよびRX24UMCUのラインナップを拡大します
- Nanotec:ブラシレスDCモーターおよびステッピングモーター用のコンパクトなモーターコントローラー
- 製造業のリーンシックスシグマを理解するためのガイド
- メーカーや他のロボットユーザーにとってのロボットシミュレーションの3つの利点
- サーボモーターの修理とトラブルシューティングのヒント
- コロナウイルス(COVID-19)の情報とリソース
- ハイブリッド製造のメリットと課題を理解する
- エンジンスターターモーターを理解する
- 再生不可能なエネルギー資源を理解する
- ネジとボルトを理解する
- パワートレインとドライブトレインを理解する