


精密モーションコントロールアプリケーションにおけるステッピングモーターの騒音と振動の最小化
ステッピングモーターは幅広いアプリケーションでうまく機能しますが、トルクリップルと電流歪みの問題に苦労する可能性があります。考えられる解決策として、AllegroMicroSystemsの独自のアルゴリズムであるQuietStepについて学びます。
ステッピングモーターは、多くのアプリケーションで直流(DC)およびブラシレスDC(BLDC)モーターに勝る独自の利点を提供します。バイポーラステッパーは、制御ループや外部センサーを使用せずに、正確な開ループ位置とゼロ速度トルクを提供します。制御されたステッピング機能を備えたステッピングモーターは、閉回路TV(CCTV)、3Dプリンター、コンピューター数値制御(CNC)、繊維製造装置、ピックアンドプレース機など、さまざまな精密モーションコントロールアプリケーションでうまく機能します。
ステッピングモーターの導入を成功させるには、騒音と振動を効果的に管理する必要があります。たとえば、CCTVアプリケーションでは、振動はイメージセンサーとジンバルに直接変換されます。大きなズームと動きを組み合わせると、画像が歪む可能性があります。 3D印刷では、高トルクリップルによって引き起こされるモーターの共振またはオーバーシュートにより、多くの不要な印刷アーティファクトが発生する可能性があります。ほとんどの場合、モーターの振動を減らすと、画質が向上したり、3D印刷がより正確になります。モーターの振動を減らすことで、全体的な動作をより静かにすることもできます。
独自のアルゴリズムに基づく高度な技術が利用可能になり、トルクリップルと電流歪みを低減することでステッピングモーター設計のノイズと振動を最小限に抑えることができます。これらのモーションコントロールソリューションを詳しく調べる前に、振動の原因、ひいては可聴ノイズの原因を理解しておくと役立ちます。まず、ステッピングモーターがどのように動作するかを詳しく見てみましょう。
ステッパーの基礎
バイポーラステッピングモーターは、相と呼ばれる2つのグループに配置された複数のコイルで構成された個別の極位置を持つDCモーターです。 2つの相の間の電流比によって、2つの巻線の間に回転子がどのように配置されるかが決まります。このようにして、ステッピングモーターは、2つの極の間の位置をマイクロステップと呼ばれる小さな増分に分割できます。
各ステッピングモーター巻線の電流を合計して、ベクトルの大きさがトルクであるベクトルを作成できます。極空間の2つの相のそれぞれの電流を調べることにより、各電気サイクルで回転するベクトルを視覚化できます。
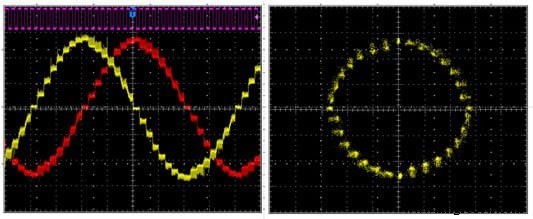
図1。 1/8ステップのバイポーラステッピングモーターの2つの巻線のそれぞれの相電流(左)。 1/8ステップのバイポーラステッパーの2つの巻線のそれぞれの相電流ですが、極性ドメインで表されます(右)。
時間ベースの領域(図1左)では、トルクは2つの曲線の下の面積の合計として定義されます。極領域(図1右)では、ベクトルの大きさはトルクです。これらの画像では、フィールドが各電気サイクルを移動するときにトルクが一定であることがわかります。トルクが一定でない場合、システムは振動と可聴ノイズを経験します。
モーターが共振状態で動作していないと仮定すると、トルクリップルは、ステッピングモーターの可聴ノイズと振動の最大の原因になります。
ステッピングモーターの制御(電流制御)
パルス幅変調(PWM)電流制御は、ステッパーを駆動する最も一般的な方法です。電流制御を実装することにより、コントローラーPWMは出力をチョップし、各巻線の電流を制限して、ローターの位置を定義する比率を維持します。
PWM電流制御の性質により、適用されるデューティサイクル、モーターのインダクタンス、およびモーターの両端の電圧に基づいて電流リップルが発生します。リップルを最小限に抑えるために、コントローラはさまざまな減衰モードを実装することにより、巻線の電流がどのように減少するかを管理できます。
駆動電流のランプアップから始まる単一のPWMサイクルの一般的な減衰モードを確認しましょう。
図2Aに示すドライブに続いて、図2Bおよび2Cに示す2つの同期方法により、PWMオフ時間中に減衰モードが実装されます。
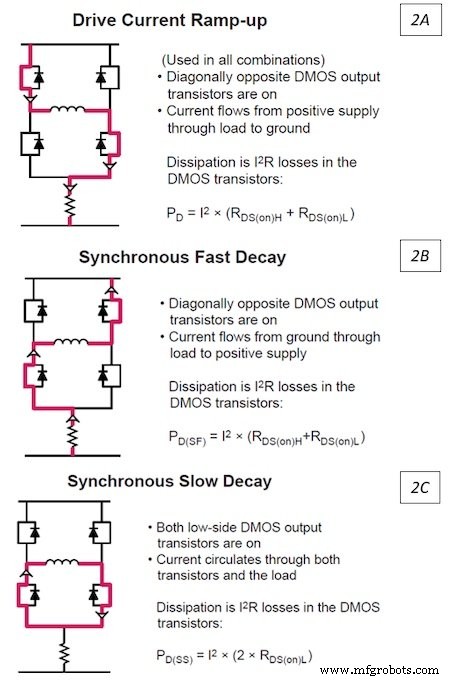
図2。 ドライブモードとディケイモードを示すフルブリッジの現在のパス。
高速減衰は最適な電流制御を提供しますが、リップルが大きくなります。減衰が遅いとリップルが低くなりますが、減衰率はモーターの逆起電力(BEMF)の影響を受け、場合によっては電流に歪みが生じる可能性があります。
図3Aは、100%遅い減衰を使用した場合に何が起こるかを示しています。巻線電流が低下しているとき、ゆっくりと減衰すると電流を十分に速く減少させることができず、立ち下がりエッジに歪みが生じます。図3Bは、100%高速減衰を使用した場合の効果を示しています。リップル電流ははるかに大きくなりますが、コントローラーは電流の正確な制御を維持します。
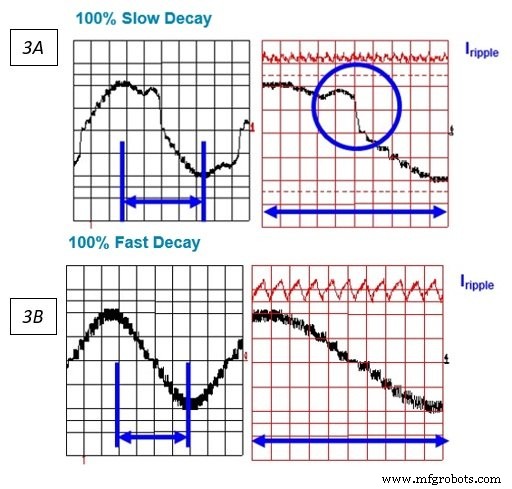
図3A。 ゆっくりと減衰すると、負荷の電流が減少しているときに歪みが発生する可能性があります。
図3B。 急速な減衰は大きなリップル電流を引き起こし、振動や可聴ノイズを引き起こす可能性があります。
図1に示す影響を回避し、妥協点に到達することで妥当なリップル電流を維持することもできます。負荷の電流が減少しているとき、ドライバーは混合減衰として知られる高速減衰と低速減衰の組み合わせを実装します。図4に示すように、オフ時間は高速減衰の一部と低速減衰の一部に分けられます。負荷の電流が増加している場合、低速減衰はリップルを最小限に抑えます。
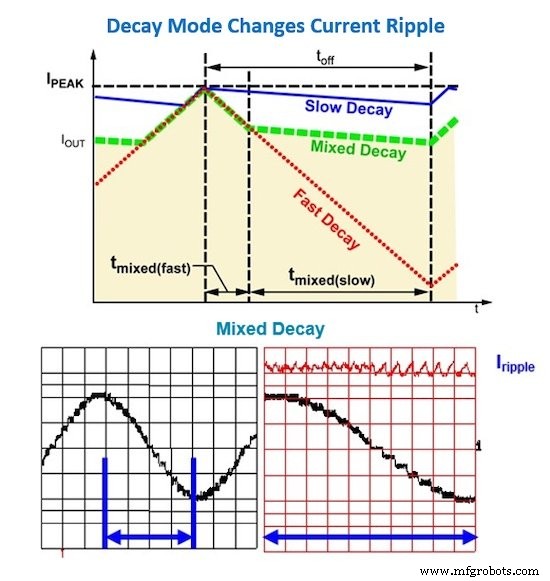
図4。 混合減衰は、巻線の電流の制御を維持しながら、リップルを最小限に抑えます。
ステッピングモーターの特性とそのLR時定数によっては、立ち上がりエッジでのゆっくりとした減衰により、電流の変化率が速すぎてPWMコントローラーが電流センスアンプのブランキングのために低電流に調整できないという問題が発生する可能性があります。このシナリオでは、図5に示すように、負荷の電流が増加しているときに電流の歪みが発生する可能性があります。
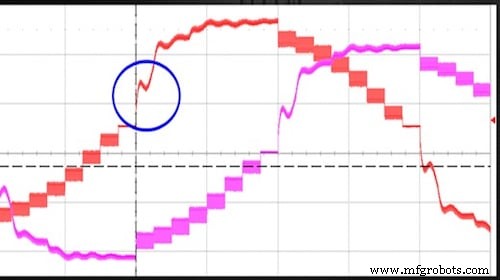
図5。 立ち上がりエッジでのゆっくりとした減衰は、特定のLR特性を持つモーターに歪みを引き起こす可能性があります。
すべてのバイポーラステッピングモーターで機能する簡単な妥協点を実現することは困難です。可能な限り低いリップルを維持しながらこれらの問題を解決するには、システムはさまざまなモーター特性に適応する必要があります。
トルクリップルを低減するための新しいアプローチ
Allegroは、ステッピングモーターアプリケーションのトルクリップルと電流歪みを低減する方法を導入しました。 QuietStepと呼ばれるこのイノベーションは、Allegroの最新のA5984ステッピングモータードライバーのオプションとして利用できるようになりました。
QuietStepテクノロジーは、複雑なソフトウェアを使用せずにすべての動作条件下で可能な限り最高のパフォーマンスを達成するために、サイクルごとに必要な高速減衰の割合を動的に(上または下に)調整する独自のアルゴリズムを使用します。
このアルゴリズムは、最初に低速減衰を実装し、次に高速減衰を実装することにより、混合減衰への従来のアプローチを逆にします。図6Aは、高速減衰と低速減衰の固定部分と、PWMオフタイムサイクルを開始する高速減衰を使用した従来の混合減衰を示しています。図6Bは、PWMオフタイムサイクルの開始時にQuietStepを使用した場合にどのように遅い減衰が始まるかを示しています。 QuietStepは、正確な電流レギュレーションを維持しながら、電流リップルを最小限に抑えるために、高速減衰と低速減衰の比率を自動的に調整します。
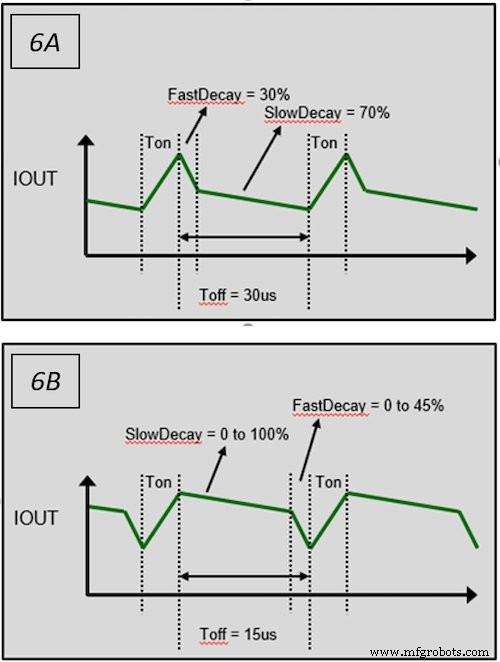
図6A。 高速減衰と低速減衰の比率が固定されている従来の混合減衰。
図6B。 QuietStepは、高速減衰と低速減衰の比率を動的に調整して、電流制御を維持し、電流リップルを最小限に抑えることができます。
高速減衰は、電流調整に必要な場合にのみ導入され、リップル電流を可能な限り低くします。図7は、電流の減少に伴う固定混合減衰と、電流の増加に伴うゆっくりとした減衰による電流制御の喪失に起因する高リップル電流を示しています。 QuietStepテクノロジーは、混合減衰と比較してリップル電流を半分に削減することにより、これらの影響を排除します。電流が増加しているとき、QuietStepは電流レギュレーションをゼロアンペアまで維持します。
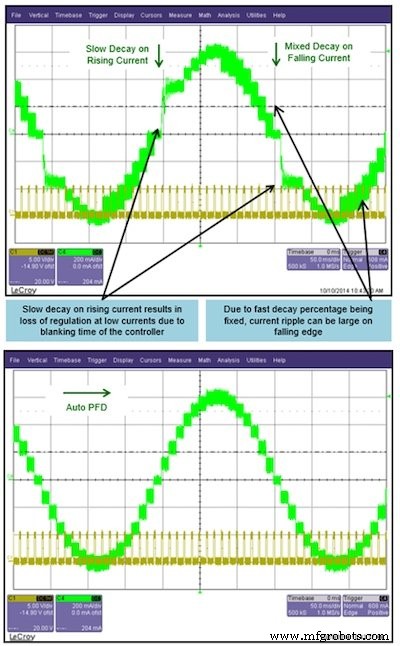
図7。 電流の増加に伴う従来のゆっくりとした減衰と、電流を減少させるための混合減衰は、電流の増加に伴う上昇時のレギュレーションの喪失と、電流の減少に伴う大きなリップルをもたらします。 QuietStepは、電気サイクル全体を通じて低リップル電流を維持しながら、電流を増加させながら優れた電流調整を提供します。
システムレベルの電流リップルと共振を低減することで、振動と振動による可聴ノイズを最小限に抑えます。その結果、CCTVシステムでのビデオイメージングが向上し、3Dプリンターでの印刷品質が向上します。
可聴ノイズと振動を低減することで、ホームオートメーションのドアロックやバルブ制御から精密ビジョンシステムや3D印刷まで、ほぼすべてのモーター制御アプリケーションが強化されます。 AllegroのQuietStepテクノロジーにより、システム内の騒音や振動の発生源を特定する手間が省けます。 ICに完全に統合されたQuietStepは、実装が簡単で、プログラミングや外部コンポーネントを必要とせず、完全に自動化されています。
バイポーラステッピングモータードライバーを使用したQuietStepの導入
Allegro A5984のようなこの高度なテクノロジーを可能にするマイクロステッピングモータードライバーにより、電流波形は広範囲のステッピングモーター速度と特性にわたって自動的に最適化されます。 QuietStepテクノロジーを搭載したステッピングモータードライバーソリューションは、PWMサイクル中の高速減衰の量をオンザフライで調整して、さまざまな動作条件での電流リップルを最小限に抑えます。
QuietStep機能により、システムパフォーマンスが向上し、可聴モーターノイズが減少し、振動が減少し、ステップ精度が向上します。このテクノロジーを利用して、A5984ドライバーは、フルステップから最大1/32ステップモードまでバイポーラステッピングモーターを動作させるように設計されており、最大40Vおよび±2Aの出力ドライブ容量を可能にします。全体として、QuietStepアルゴリズムによりシステムが容易になります。設計、実装、運用。
A5984ドライバーとQuietStepテクノロジーの詳細については、A5984製品ページにアクセスしてください。
Allegro MicroSystemsは、モーションコントロールおよびエネルギー効率の高いシステム向けの電力およびセンシングソリューションの世界的リーダーです。詳細については、AllegroMicroSystemsのWebサイトにアクセスしてください。
業界記事は、業界パートナーが編集コンテンツに適さない方法でAll About Circuitsの読者と有用なニュース、メッセージ、テクノロジーを共有できるようにするコンテンツの形式です。すべての業界記事は、読者に有用なニュース、技術的専門知識、またはストーリーを提供することを目的とした厳格な編集ガイドラインの対象となります。業界記事で表明されている見解や意見はパートナーのものであり、必ずしもAll AboutCircuitsやそのライターのものではありません。
産業用ロボット
- 許容回路とインターロック回路
- ステッピングモーター
- ACS712電流センサーの動作とアプリケーション
- Renesasは、モーター制御アプリケーション向けにRX24TおよびRX24UMCUのラインナップを拡大します
- Nanotec:ブラシレスDCモーターおよびステッピングモーター用のコンパクトなモーターコントローラー
- 遺伝的アルゴリズムのアプリケーションと制限
- ロボットTIG溶接がどのように生産に精度と品質管理を追加するか
- IQモーションコントロールは、新しい範囲のサーボモーターを発売します
- サーボモーターとステッピングモーターの間の灰色の領域
- 安全に統合されたモーションコントロールにより、安全性と生産性を共存させることができます
- 制御用の接続:位置およびモーションセンサー用の通信インターフェース