


ステッピングモーター
ステッピングモーターとサーボモーター
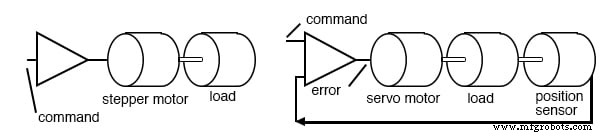
ステッピングモーター 電気モーターの「デジタル」バージョンです。ローターは、従来のモーターのように連続的に回転するのではなく、コマンドに従って個別のステップで移動します。停止したが通電すると、ステッパー (ステッピングモーターの略)保持トルクで負荷を安定させます 。
過去20年間にステッピングモーターが広く受け入れられたのは、デジタル電子機器の台頭によるものです。最新のソリッドステートドライバーエレクトロニクスは、その成功の鍵でした。また、マイクロプロセッサはステッピングモーターのドライバー回路に簡単に接続できます。
アプリケーションに関しては、ステッピングモーターの前身はサーボモーターでした。今日、これは高性能モーションコントロールアプリケーションに対する高コストのソリューションです。サーボモーターの費用と複雑さは、追加のシステムコンポーネント(位置センサーとエラーアンプ)によるものです)それでも、低電力ステッパーの把握を超えて重い負荷を配置する方法です。
高加速または異常に高い精度でも、サーボモーターが必要です。それ以外の場合、デフォルトは、シンプルなドライブエレクトロニクス、優れた精度、優れたトルク、適度な速度、および低コストのためにステッパーです。
ステッピングモーターとサーボモーター
ステッピングモーターは、フロッピードライブに読み取り/書き込みヘッドを配置します。それらはかつてハードドライブで同じ目的で使用されていました。ただし、最新のハードドライブヘッドの位置決めに必要な高速性と精度には、リニアサーボモーター(ボイスコイル)を使用する必要があります。
サーボアンプは、ディスクリートコンポーネントを統合するのが難しいリニアアンプです。サーボアンプのゲインと機械部品の位相応答を最適化するには、かなりの設計作業が必要です。ステッピングモータードライバーはそれほど複雑ではないソリッドステートスイッチであり、「オン」または「オフ」のいずれかです。したがって、ステッピングモーターコントローラーは、サーボモーターコントローラーよりも複雑でなく、コストもかかりません。
Slo-syn 同期モーターは、単相永久コンデンサ誘導モーターのようにACライン電圧で動作できます。コンデンサは90 °を生成します 第二段階。直接線間電圧で、2相ドライブがあります。
バイポーラの駆動波形 (±)2-24Vの方形波が最近より一般的です。双極磁場は、単極から生成することもできます。 (1つの極性)センタータップ巻線の交互の端に印加される電圧(下の図)。
言い換えれば、DCはACを見るようにモーターに切り替えることができます。巻線が順番に通電されると、回転子は結果として生じる固定子磁界と同期します。したがって、ステッピングモーターはAC同期モーターのクラスとして扱います。
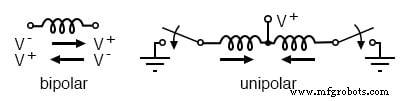
(b)のセンタータップコイルのユニポーラドライブは、(a)のシングルコイルのAC電流をエミュレートします
特徴
ステッピングモーターは、ローターに巻き取りスリップリングや整流子が含まれていないため、頑丈で安価です。ローターは円筒形の固体であり、突出した極または細い歯のいずれかを持っている場合もあります。多くの場合、ローターは永久磁石です。
戻り止めトルクを示す無動力の手の回転により、ローターが永久磁石であると判断できます。 、トルク脈動。ステッピングモーターコイルは、スタック可能を除いて、積層ステーター内に巻かれています。 工事。巻線フェーズは2つから5つまであります。
これらのフェーズは、しばしばペアに分割されます。したがって、4極ステッピングモーターは、90 °の間隔で配置されたインラインの極のペアで構成される2つのフェーズを持つ場合があります。 離れて。フェーズごとに複数の極ペアが存在する場合もあります。たとえば、12極ステッパーには6対の極があり、フェーズごとに3対です。
ステッピングモーターは必ずしも連続的に回転するわけではないため、馬力定格はありません。それらが継続的に回転する場合、それらはサブフラクショナル馬力定格能力にさえ近づきません。これらは、他のモーターと比較して、本当に小型の低電力デバイスです。
これらのトルク定格は、4 kgサイズのユニットで1,000インチオンス(インチオンス)または10 N-m(ニュートンメートル)です。小さな「10セント硬貨」サイズのステッパーのトルクは、100分の1ニュートンメートルまたは数インチオンスです。ほとんどのステッパーは直径数インチで、トルクはn-mまたは数インチです。
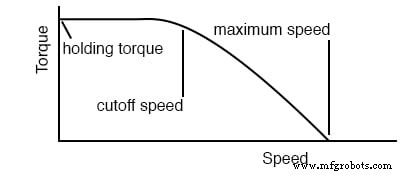
利用可能なトルクは、速度とトルクの曲線に示されているように、モーター速度、負荷慣性、負荷トルク、および駆動電子機器の関数です。 下。通電された保持ステッパーは、比較的高い保持トルク 評価。実行中のモーターに使用できるトルクは少なく、高速でゼロに減少します。
この速度は、モーター負荷の組み合わせの機械的共振のために達成できないことがよくあります。
ステッパー速度特性
ステッピングモーターは、一度に1ステップずつ移動します。ステップ角度 ドライブ波形が変更されたとき。ステップ角は、モーター構造の詳細(コイルの数、極の数、歯の数)に関連しています。 90 °から可能です 〜0.75 ° 、1回転あたり4〜500ステップに相当します。
ドライブエレクトロニクスは、ローターをハーフステップで動かすことにより、ステップ角度を半分にすることができます。 。
ステッパーは、速度-トルク曲線の速度を瞬時に達成することはできません。 最大開始頻度 停止およびアンロードされたステッパーを開始できる最高速度です。負荷がかかると、このパラメータは達成できなくなります。
実際には、ステップレートは、最大開始周波数よりかなり低い値から開始するときに増加します。ステッピングモーターを停止する場合、停止する前にステップレートが低下する場合があります。
ステッパーが開始および停止できる最大トルクは、プルイントルクです。 。ステッパーにかかるこのトルク負荷は、モーターシャフトにかかる摩擦(ブレーキ)および慣性(フライホイール)負荷によるものです。モーターの速度が上がったら、引き抜きトルク ステップを失うことなく最大の持続可能なトルクです。
ステッピングモーターには、複雑さが増す順に、可変リラクタンス、永久磁石、ハイブリッドの3種類があります。可変リラクタンスステッパーは、突出した極を備えた頑丈な軟鋼ローターを備えています。永久磁石ステッパーには、円筒形の永久磁石ローターがあります。
ハイブリッドステッパーには、より小さなステップ角のために永久磁石ローターに追加された柔らかい鋼の歯があります。
可変磁気抵抗ステッパー
可変リラクタンスステッピングモーター 磁束に依存して、磁気回路を通る最も低い磁気抵抗経路を探します。これは、不規則な形状の軟磁性ローターが移動して磁気回路を完成させ、高磁気抵抗のエアギャップの長さを最小限に抑えることを意味します。
固定子には通常、極のペアの間に3つの巻線が分散されており、回転子には4つの突極があり、30 °になります。 ステップ角。手で回転させたときに戻り止めトルクのない非通電ステッパーは、可変リラクタンスタイプのステッパーとして識別できます。
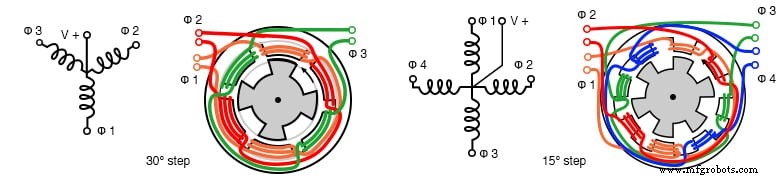
3相および4相可変リラクタンスステッピングモーター
3φステッパーの駆動波形は、「リラクタンスモーター」のセクションで確認できます。下の図に、4φステッパーのドライブを示します。固定子の位相を順番に切り替えると、回転子が追従する回転磁界が生成されます。
ただし、回転子の極の数が少ないため、回転子の移動は各ステップの固定子の角度よりも小さくなります。可変リラクタンスステッピングモーターの場合、ステップ角は次の式で与えられます。
ΘS=360o /NSΘR=360o /NRΘST=ΘR-ΘSここで、ΘS=固定子角度、ΘR=回転子角度、ΘST=ステップ角度NS =固定子極の数、NP =回転子極の数
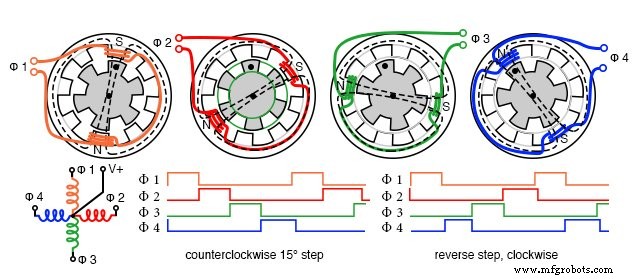
可変磁気抵抗ステッパーのステッピングシーケンス
上図では、φ1からφ2などに移動すると、固定子の磁場が時計回りに回転します。ローターは反時計回り(CCW)に動きます。何が起こらないかに注意してください!点線のローター歯は次のステーター歯に移動しません。代わりに、φ2ステーターフィールドは、ローターCCWを動かす際に別の歯を引き付けます。これは、より小さな角度(15 °)です。 )固定子の角度30 °より 。
45 °のローター歯角度 上記の式で計算に入ります。ローターはCCWを45 °で次のローター歯に移動しました 、ただし、CWと30 °一致します 固定子の歯。したがって、実際のステップ角は、45 °の固定子角度の差です。 ローター角度は30 °です。
ローターとステーターの歯数が同じ場合、ステッパーはどのくらい回転しますか?ゼロ—表記なし。
フェーズφ1が通電された状態で静止状態から開始し、「点線の」ローター歯を次のCCWステーター歯(45 °)に位置合わせするために3つのパルス(φ2、φ3、φ4)が必要です。 。固定子の歯ごとに3パルス、固定子の歯が8つある場合、24パルスまたはステップで、ローターが360 °移動します。 。
パルスのシーケンスを逆にすることにより、回転方向が右上に逆になります。方向、ステップレート、およびステップ数は、ドライバーまたはアンプに給電するステッピングモーターコントローラーによって制御されます。これを組み合わせて1つの回路基板にすることができます。
コントローラは、マイクロプロセッサまたは特殊な集積回路である可能性があります。ドライバーはリニアアンプではありませんが、ステッパーに電力を供給するのに十分な高電流が可能なシンプルなオンオフスイッチです。原則として、ドライバーは各フェーズのリレーまたはトグルスイッチである可能性があります。実際には、ドライバはディスクリートトランジスタスイッチまたは集積回路のいずれかです。
ドライバーとコントローラーの両方を組み合わせて、直接コマンドとステップパルスを受け入れる単一の集積回路にすることができます。電流を適切な相に順番に出力します。
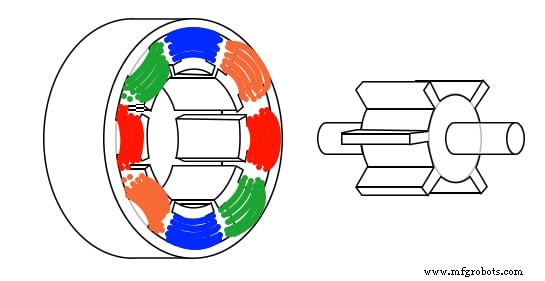
可変リラクタンスステッピングモーター
リラクタンスステッパーを分解して、内部コンポーネントを表示できます。可変リラクタンスステッピングモーターの内部構造を上の図に示します。回転子には突出した極があり、切り替え時に回転子の界磁に引き付けられるようになっています。実際のモーターは、簡略化した図よりもはるかに長くなっています。
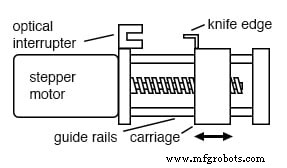
可変リラクタンスステッパードライブ親ねじ
シャフトには、駆動ネジが頻繁に取り付けられています(上の図)。これにより、フロッピードライブコントローラからのコマンドにより、フロッピードライブのヘッドが移動する場合があります。
可変リラクタンスステッピングモーターは、適度なレベルのトルクのみが必要で、粗いステップ角が適切な場合に適用されます。フロッピーディスクドライブで使用されるスクリュードライブは、そのようなアプリケーションです。コントローラの電源を入れると、キャリッジの位置がわかりません。
ただし、キャリッジを光遮断器に向けて駆動し、ナイフエッジが遮断器を「ホーム」として切断する位置を調整することができます。コントローラは、この位置からのステップパルスをカウントします。負荷トルクがモータートルクを超えない限り、コントローラーはキャリッジの位置を認識します。
概要:可変リラクタンスステッピングモーター
- ローターは、突出した(突き出た)極を備えた軟鉄製のシリンダーです。
- これは最も複雑でなく、最も安価なステッピングモーターです。
- 非通電のモーターシャフトを手で回転させる際に戻り止めトルクがない唯一のタイプのステッピング。
- 大きなステップ角
- 直線的なステップ動作のために、親ねじがシャフトに取り付けられることがよくあります。
永久磁石ステッパー
永久磁石ステッピングモーター 円筒形の永久磁石ローターを備えています。固定子には通常2つの巻線があります。 ユニポーラを可能にするために、巻線をセンタータップすることができます。 巻線の一方の端からもう一方の端に電圧を切り替えることによって磁場の極性が変化するドライバ回路。
バイポーラ センタータップなしで巻線に電力を供給するためには、交流極性のドライブが必要です。純粋な永久磁石ステッパーは通常、大きなステップ角を持っています。通電されていないモーターのシャフトの回転は、戻り止めトルクを示します。戻り止めの角度が大きい場合は、7.5 °と言います。 〜90 ° 、ハイブリッドステッパーではなく永久磁石ステッパーである可能性があります。
永久磁石ステッピングモーターは、2つ(またはそれ以上)の巻線に印加される段階的な交流を必要とします。実際には、これはほとんどの場合、ソリッドステート電子機器によってDCから生成される方形波です。
バイポーラ ドライブは、(+)と(-)の極性を交互に繰り返す方形波です。たとえば、+ 2.5Vから-2.5Vです。ユニポーラ ドライブは、センタータップコイルの両端に印加された正の方形波のペアから発生したコイルに(+)と(-)の交流磁束を供給します。双極波または単極波のタイミングは、ウェーブドライブ、フルステップ、またはハーフステップです。
ウェーブドライブ
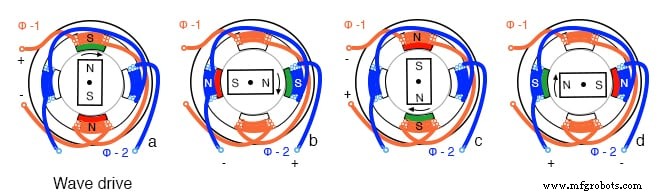
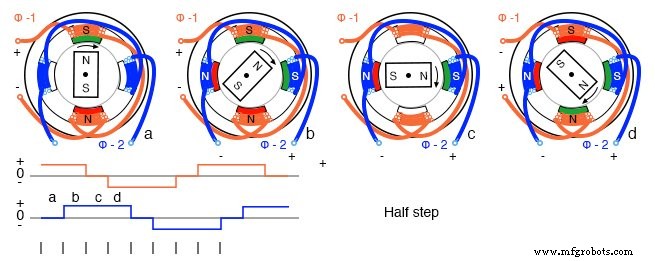
PMウェーブドライブシーケンス(a)φ1+、(b)φ2+、(c)φ1-、(d)φ2-
概念的には、最も単純なドライブはウェーブドライブです。 。左から右への回転シーケンスは、正のφ-1ポイントのローター北極上、(+)φ-2ポイントのローター北右、負のφ-1はローターを北下に引き付け、(-)φ-2ポイントはローター左です。以下の波形駆動波形は、一度に1つのコイルのみが通電されていることを示しています。単純ですが、これは他の駆動技術ほど多くのトルクを生成しません。
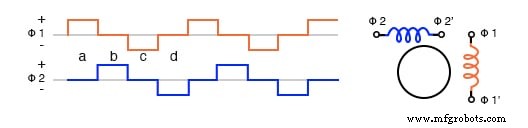
波形:バイポーラウェーブドライブ
波形(上の図)は、(+)と(-)の両方の極性がステッパーを駆動するため、バイポーラです。駆動電流の極性が反転するため、コイルの磁界が反転します。
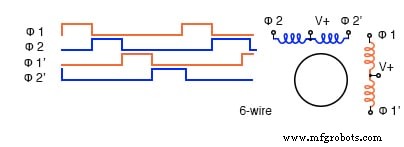
波形:ユニポーラウェーブドライブ
必要な極性は1つだけなので、波形(上の図)は単極性です。これにより、ドライブの電子機器が簡素化されますが、2倍のドライバーが必要になります。センタータップコイルの両端に印加して交流磁場を発生させるには、1対の(+)波が必要なため、波形の数は2倍になります。
モーターには交流磁場が必要です。これらは、単極波または双極波のいずれかによって生成される可能性があります。ただし、モーターコイルにはユニポーラドライブ用のセンタータップが必要です。
永久磁石ステッピングモーターは、さまざまなリード線構成で製造されています。
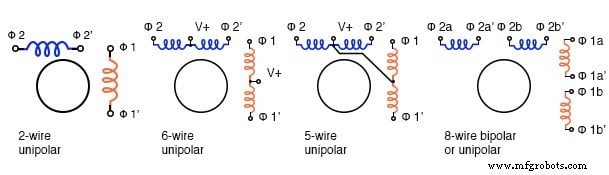
ステッピングモーターの配線図
- 4線式モーターは、バイポーラ波形でのみ駆動できます。
- 最も一般的な配置である6線式モーターは、センタータップがあるためユニポーラドライブを対象としています。ただし、センタータップを無視すると、双極波によって駆動される可能性があります。
- 両方の巻線に同時に通電すると、共通のセンタータップが干渉するため、5線式モーターは単極波でのみ駆動できます。
- 8線式構成はまれですが、最大限の柔軟性を提供します。 6線式または5線式モーターの場合と同様に、ユニポーラドライブ用に配線できます。コイルのペアは、高電圧バイポーラ低電流ドライブの場合は直列に接続でき、低電圧高電流ドライブの場合は並列に接続できます。
バイファイラーワインディング コイルを2本のワイヤー(多くの場合、赤と緑のエナメル線)で並列に巻くことによって生成されます。この方法では、センタータップ巻線の巻数比が正確に1:1になります。この巻線方法は、上記の4線式配置を除くすべてに適用できます。
フルステップドライブ
フルステップ 両方のコイルが同時に通電されるため、ドライブはウェーブドライブよりも多くのトルクを提供します。これにより、2つの界磁極の中間にある回転子極が引き付けられます。 (下の図)
フルステップ、バイポーラドライブ
上記のように、フルステップバイポーラドライブのステップ角はウェーブドライブと同じです。ユニポーラドライブ(図示せず)は、センタータップ巻線の端に適用される上記のバイポーラ波形のそれぞれに対して、1対のユニポーラ波形を必要とします。ユニポーラドライブは、より複雑で安価なドライバ回路を使用します。より多くのトルクが必要な場合、バイポーラドライブの追加コストは正当化されます。
ハーフステップドライブ
特定のステッピングモータージオメトリのステップ角度は、ハーフステップで半分にカットされます。 ドライブ。これは、1回転あたり2倍のステップパルスに相当します。 (下の図)ハーフステッピングにより、モーターシャフトの位置決めの分解能が向上します。
たとえば、モーターをハーフステップで動かすと、インクジェットプリンターの用紙上でプリントヘッドが移動し、ドット密度が2倍になります。
ハーフステップ、バイポーラドライブ
ハーフステップドライブは、ウェーブドライブとフルステップドライブを組み合わせたもので、一方の巻線に通電した後、両方の巻線に通電し、2倍のステップを生成します。ハーフステップドライブのユニポーラ波形を上に示します。ローターは、ウェーブドライブの場合は界磁極と整列し、フルステップドライブの場合は極間で整列します。
マイクロステッピングは専用コントローラーで可能です。変化させることにより、巻線への電流を正弦波状に多くのマイクロステップを通常の位置の間で補間することができます。永久磁石ステッピングモーターの構造は、上の図とはかなり異なります。
ステップ角を小さくするには、図に示す数を超えて極の数を増やすことが望ましいです。また、製造を容易にするために、巻線の数を減らすか、少なくとも巻線の数を増やさないことが望ましい。
建設
永久磁石ステッピングモーターの構造は、上の図とはかなり異なります。ステップ角を小さくするには、図に示す数を超えて極の数を増やすことが望ましいです。また、製造を容易にするために、巻線の数を減らすか、少なくとも巻線の数を増やさないことが望ましい。
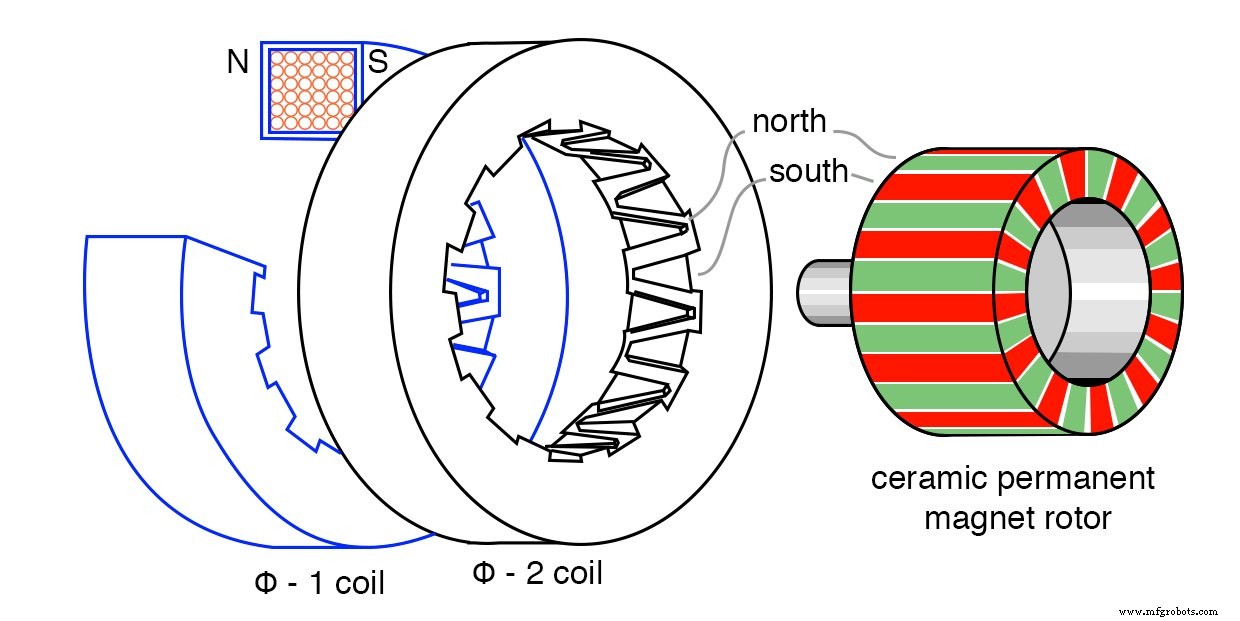
永久磁石ステッピングモーター、24極缶スタック構造
永久磁石ステッパーには2つの巻線しかありませんが、2つのフェーズのそれぞれに24極があります。このスタイルの構造は、スタック可能として知られています。 。相巻線は、指を中央に持ってきた軟鋼シェルで包まれています。
1つのフェーズは、一時的に、北側と南側になります。各側面は、ドーナツの中央に12本の指をかみ合わせて、合計24本の極に巻き付けられます。これらの交互の南北の指は、永久磁石ローターを引き付けます。
位相の極性が逆になると、ローターは360 °ジャンプします。 / 24 =15 ° 。どちらの方向かわからないので、どちらが役に立たないのか。ただし、φ-1に続いてφ-2をオンにすると、ローターは7.5 °移動します。 φ-2が7.5 °だけオフセット(回転)しているため φ-1から。オフセットについては、以下を参照してください。また、位相を入れ替えると再現可能な方向に回転します。
上記の波形のいずれかを適用すると、永久磁石ローターが回転します。
ローターは、示されている24極パターンで磁化された灰色のフェライトセラミックシリンダーであることに注意してください。これは、マグネットビューアーフィルムまたは紙のラッピングに適用された鉄のファイリングで見ることができます。ただし、フィルムを使用すると、北極と南極の両方の色が緑色になります。
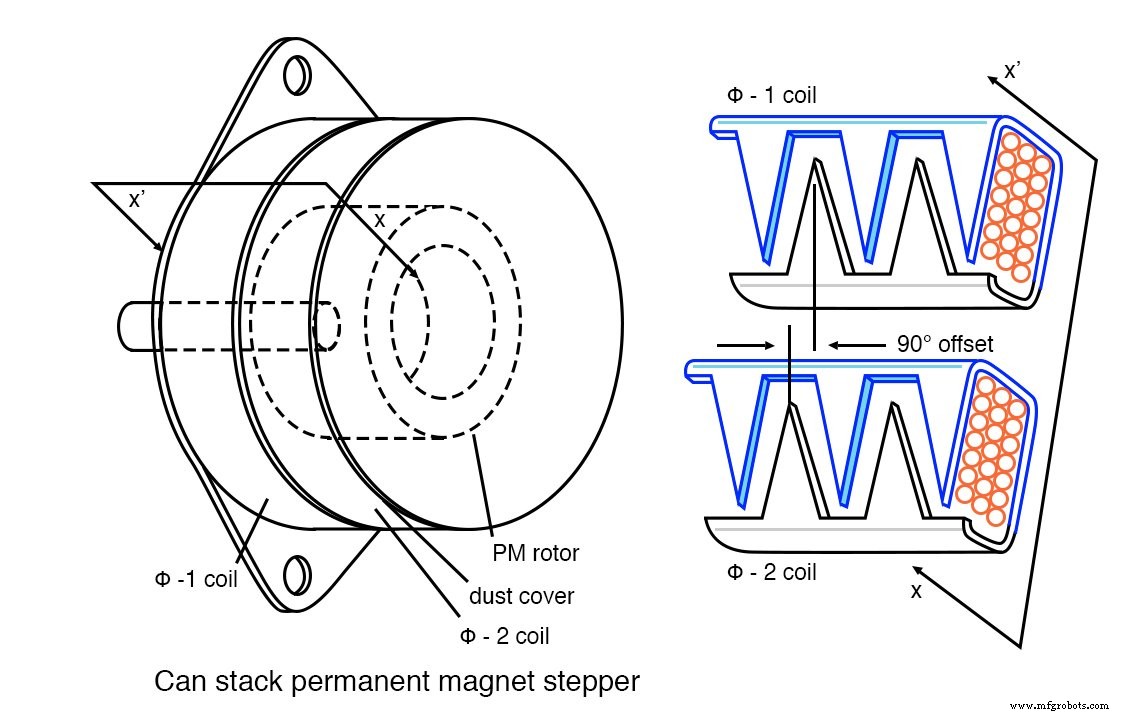
(a)缶スタックの外観、(b)フィールドオフセットの詳細
PMステッパーの缶スタックスタイルの構造は、積み重ねられた「缶」によって特徴的で簡単に識別できます(上の図)。 2相セクション間の回転オフセットに注意してください。これは、ローターが2つのフェーズ間のフィールドの切り替えに追従するようにするための鍵です。
概要:永久磁石ステッピングモーター
- ローターは永久磁石であり、多くの場合、多数の極で磁化されたフェライトスリーブです。
- 缶スタック構造により、1つのコイルから多数の極が柔らかな鉄の指でインターリーブされます。
- 大から中程度のステップ角。
- コンピュータのプリンタで紙を進めるためによく使用されます。
ハイブリッドステッピングモーター
ハイブリッドステッピングモーター 可変リラクタンスステッパーと永久磁石ステッパーの両方の機能を組み合わせて、より小さなステップ角を生成します。ローターは円筒形の永久磁石で、軸に沿って放射状の軟鉄の歯で磁化されています。
固定子コイルは、対応する歯を持つ交互の極に巻かれています。通常、極のペア間には2つの巻線相が分布しています。この巻線は、ユニポーラドライブの場合はセンタータップすることができます。センタータップは、バイファイラー巻線によって実現されます。 、物理的に平行に巻かれているが直列に配線されている一対のワイヤー。
相駆動電流が逆になると、相スワップ極性の南北極。タップされていない巻線にはバイポーラドライブが必要です。
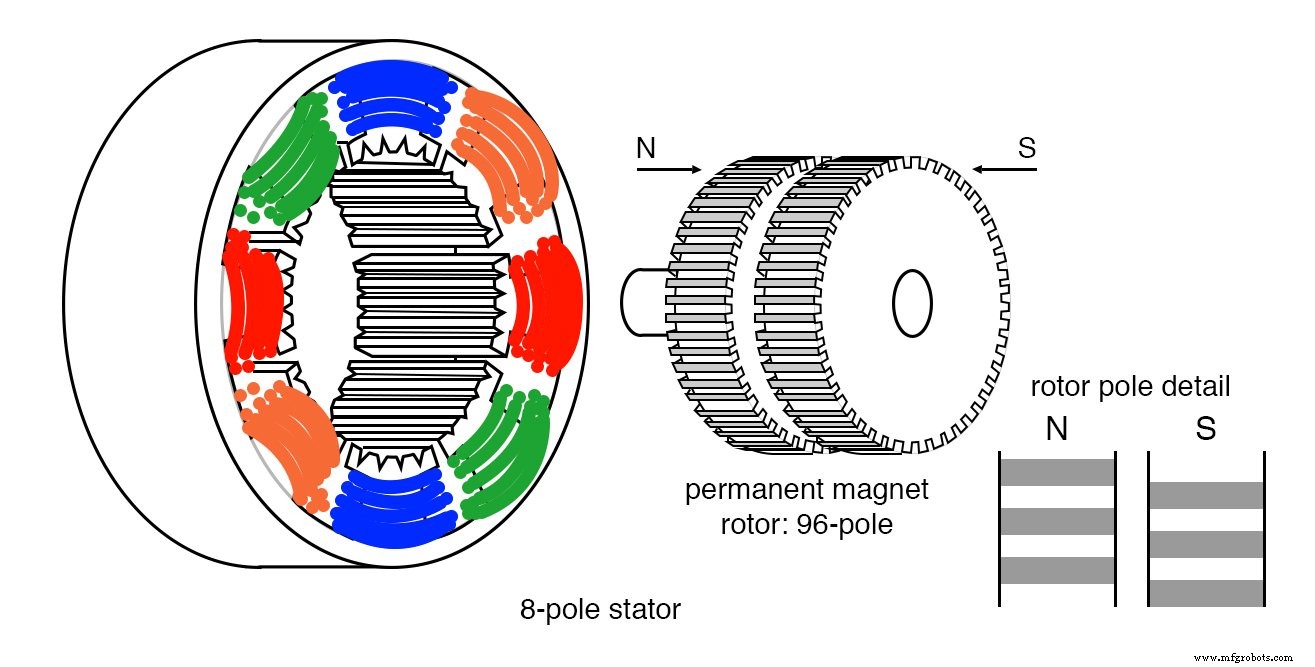
ハイブリッドステッピングモーター
一方のローターセクションの48歯は、もう一方のセクションから0.5ピッチオフセットされていることに注意してください。 (上記のローターポールの詳細を参照してください。このローターの歯のオフセットも下に示されています。)このオフセットにより、ローターには事実上、反対の極性の96個のインターリーブポールがあります。
このオフセットにより、1つの相のフィールド極性を反転させることにより、1回転ステップの1/96の回転が可能になります。上と下に示すように、二相巻線が一般的です。ただし、最大5つのフェーズが存在する可能性があります。
8極の固定子の歯は、極間のスペースに欠けている歯を除いて、48回転子の歯に対応します。したがって、ローターの1つの極、たとえばS極は、48の異なる位置でステーターと整列する場合があります。ただし、南極の歯は北の歯から半分の歯だけオフセットされています。
したがって、ローターは、96の異なる位置でステーターと整列する可能性があります。この半歯オフセットは、上のローターポールの詳細または下の図に示されています。
これが十分に複雑ではないかのように、固定子の主極は2つのフェーズ(φ-1、φ-2)に分割されます。これらの固定子相は、歯の4分の1だけ互いにオフセットされています。この詳細は、以下の概略図でのみ識別できます。その結果、相が交互に通電されると、ローターは歯の1/4のステップで移動します。
つまり、上記のステッパーの場合、ローターは1回転あたり2×96 =192ステップで移動します。
上の図は、実際のハイブリッドステッピングモーターを表しています。ただし、上記では明らかではない詳細を説明するために、簡略化された図と概略図を提供します。簡単にするために、ローターとステーターのコイルと歯の数が減っていることに注意してください。
次の2つの図では、4分の1の歯によってオフセットされた2つの固定子相によって生成された4分の1の歯の回転と、ローターの半分の歯のオフセットを示しています。駆動電流のタイミングと組み合わせた1/4歯の固定子オフセットも、回転方向を定義します。
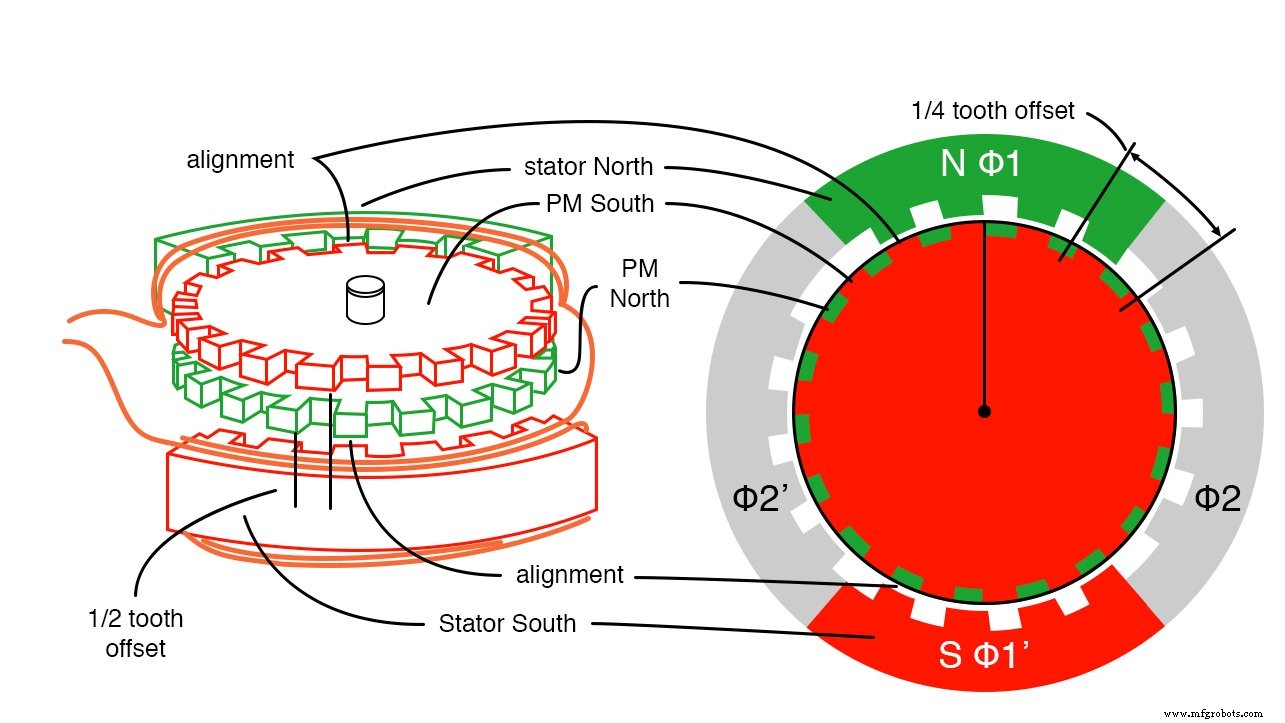
ハイブリッドステッピングモーターの概略図
ハイブリッドステッパー回路図の機能
- 永久磁石ローターの上部は南極、下部は北です。
- ローターの南北の歯は、半分の歯でオフセットされています。
- φ-1ステーターが一時的に北上、南下に通電されている場合。
- 上部のφ-1ステーターの歯は、ローターの上部の南の歯に北に整列します。
- 下部のφ-1 ’固定子の歯は、回転子の下部の北の歯に南に整列します。
- ホールドイントルクに打ち勝つためにシャフトに十分なトルクを加えると、ローターが1歯移動します。
- φ-1の極性を逆にすると、ローターは半分の歯で移動し、方向は不明になります。位置合わせは、南固定子の上から北回転子の下、北固定子の下から南回転子になります。
- φ-1に通電すると、φ-2の固定子の歯が回転子の歯と整列しません。実際、φ-2の固定子の歯は1/4の歯でオフセットされています。これにより、φ-1がオフになり、φ-2がオンになった場合に、その量だけ回転できるようになります。 φ-1とドライブの極性が回転方向を決定します。
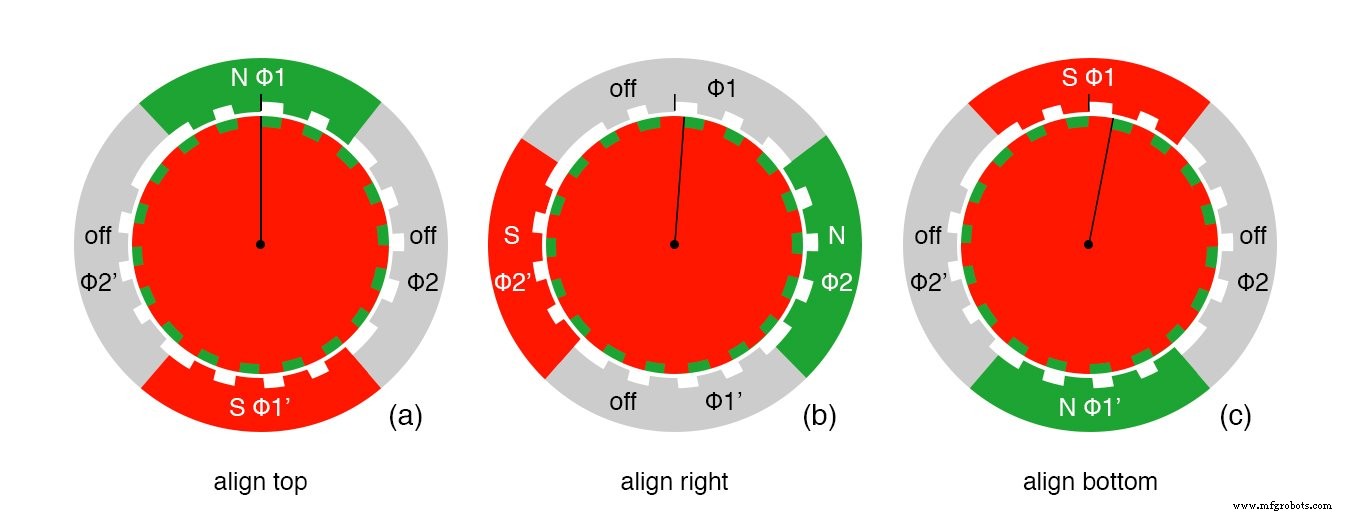
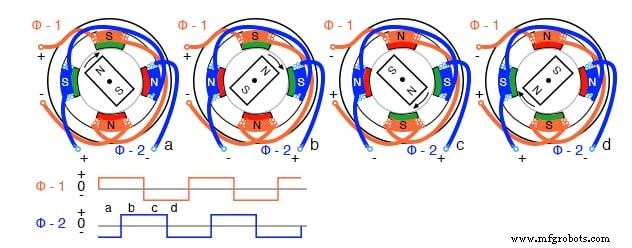
ハイブリッドステッピングモーターの回転シーケンス
ハイブリッドステッピングモーターの回転
- ローターの上部は永久磁石の南、下部は北です。フィールドφ1、φ-2は切り替え可能です:オン、オフ、リバース。
- (a) φ-1=オン=ノーストップ、φ-2=オフ。 整列(上から下): φ-1ステーター-N:ローター-トップ-S、φ-1 ’ステーター-S:ローター-ボトム-N。開始位置、回転=0。
- (b) φ-1=オフ、φ-2=オン。 整列(右から左): φ-2ステーター-N-右:ローター-トップ-S、φ-2 ’ステーター-S:ローター-ボトム-N。 1/4歯、総回転=1/4歯を回転させます。
- (c) φ-1=リバース(オン)、φ-2=オフ。 整列(下から上): φ-1ステーター-S:ローターボトム-N、φ-1 ’ステーター-N:ロータートップ-S。最後の位置から1/4歯を回転させます。開始からの総回転数:1/2歯。
- 表示されていません:φ-1=オフ、φ-2=リバース(オン)。 整列(左から右): 総回転数:3/4歯。
- 表示されていません:φ-1=オン、φ-2=オフ((a)と同じ)。 整列(上から下): 総回転1歯。
戻り止めトルクを備えた無動力ステッピングモーターは、永久磁石ステッピングまたはハイブリッドステッピングのいずれかです。ハイブリッドステッパーのステップ角は小さく、7.5 °よりはるかに小さくなります。 永久磁石ステッパーの。ステップ角は、1回転あたり数百ステップに相当する1度の何分の1かである可能性があります。 概要:ハイブリッドステッピングモーター
- ステップ角は、可変磁気抵抗または永久磁石ステッパーよりも小さくなっています。
- ローターは細かい歯を持つ永久磁石です。北と南の歯は、ステップ角を小さくするために半分の歯でオフセットされています。
- 固定子の極には、回転子と同じピッチの一致する細い歯があります。
- 固定子巻線は2相以上に分割されています。
- 1つの固定子巻線の極は、ステップ角をさらに小さくするために1/4歯でオフセットされています。
関連ワークシート:
- ステッピングモーターワークシート
産業技術