


歩行者の安全のためにADASにLiDARを追加する
現在米国で販売されているほとんどの新車には、標準またはオプション機能として歩行者自動緊急ブレーキ(PAEB)を搭載した先進運転支援システム(ADAS)が含まれています。最先端のADASにより高速道路と高速運転が改善されましたが、歩行者や自転車との衝突を軽減するための基本的なニーズはほとんど解決されていません。
米国の交通関連の事故で毎年6000人以上の歩行者が死亡していると国道交通安全局(NHTSA)が報告しました。知事高速道路安全協会の報告によると、これらの死亡者の75パーセントは夜間に発生しています。カメラとレーダー技術に基づくADASを利用することは、この課題に対処するには不十分であることが証明されています。 NHTSAとAmericanAutomobileAssociation(AAA)が実施した独立したテストでは、PAEBシステムが暗い場所で歩行者を保護できないことがよくあることが明らかになっています。
暗い状態でのPAEBのテスト

PAEBシステムは、暗い条件でのパフォーマンスを向上させることにより、年間数千人の命を救うことができます。 2009年から2018年の間に、歩行者の死亡者数は53%増加しました。米国道路安全保険協会(IIHS)および米国道路安全保険協会の報告によると、この増加のうち、90%は夜間の衝突によるものでした。 NHTSAは、2018年に、米国での6283人の歩行者の衝突事故による死亡者の76%が暗い状況で発生したと報告しています。
AAAとNHTSAによる評価では、PAEB機能が夜間のクラッシュを回避できないことがよくあることが示されています。 AAAの報告書は、「暗い場所での歩行者検出システムの性能に関する公に入手可能な情報はほとんど、またはまったくありません。車両/歩行者の衝突統計に基づくと、この環境を評価することは特に重要です。」暗い条件でそのテストPAEBを追加すると、その空白が埋められます。 「このパラメータは非常に困難ですが、それでも、多くの自然主義的な環境で照明が不足していることを考えると、妥当なテストシナリオです。」
AAAは、4台の車両のテストで、暗い状況で道路を横断する歩行者に対して、ドライバーに警告したり、自動的に減速したりするものはなかったことを発見しました。これらの結果に基づいて、AAAは、「ドライバーは、夜間の運転中や視界が悪いその他の環境では、現在の歩行者検出システムの支援に頼ってはなりません」とアドバイスしています。分析の結論として、AAAのレポートは、「各テスト車両のオーナーズマニュアルには、統合された歩行者検知システムは夜間や雨、雪、みぞれ、霧などの悪天候では歩行者を識別できない可能性があると記載されていますが、その支援は反論の余地がありません。歩行者検知システムからの信号は、夜間の状況では有益であり、おそらく最も必要な時間になる可能性があります。」
ただし、NHTSAの新車アセスメントプログラム(NCAP)、ヨーロッパの新車アセスメントプログラム(Euro NCAP)、およびIIHSで採用されている現在のプロトコルを調べると、夜間の条件下でのパフォーマンスが車両の安全性評価と賞の基礎としてテストされることはめったにありません。
したがって、Velodyne LiDAR(カリフォルニア州サンノゼ)は、評価組織が暗条件で実施されるシナリオをPAEBテストプロトコルに含めることを提案しています。このアプローチを採用することで、PAEB機能を搭載した車両の消費者は、車両の性能の限界を確実に理解し、自動車メーカーに、年間数千人の命を救うことができるADAS機能の改善を促すことができます。より正確には、これらのテストは、テスト車両のロービームヘッドライトを使用し、街灯を使用せずに、1ルクス未満の周囲照度で実施する必要があります。
LiDARとカメラ/レーダーPAEBシステムの比較
LiDARベースのPAEBソリューションには、カメラとレーダーの組み合わせと比較して固有の長所があります。
カメラの解像度は非常に高くなる可能性がありますが、通常、車両からのオブジェクトの距離を計算するには、複数のモジュールと追加の処理が必要です。また、人間の目のように、カメラは暗い条件では比較的パフォーマンスが低下します。 2018年の運輸省(DOT)のレポートによると、「視覚ベースのシステムは、[レーダーベースのシステムよりも]静止している人を検出する能力が優れていますが、明るい環境での日中の操作に限定されています。」
カメラと比較して、DOTレポートは、レーダーは夜間にうまく機能し、距離測定を提供できると述べています。しかし、レーダーには、物体の正確な位置を認識したり、互いに近接している複数の物体を区別したりするのに十分な解像度がありません。レーダーは、静止している物体や動きの遅い物体の検出に失敗することもあります。これらの欠点の結果として、カメラおよびレーダーベースのPAEB機能は、夜間の状態で歩行者を保護するのに苦労しています。
熱画像は、PAEBアプリケーションのカメラとレーダーの潜在的な補足として提案されることがあります。ただし、このテクノロジーには独自の弱点があり、現在のカメラおよびレーダーシステムの弱点に適切に対処していません。光学カメラと同様に、熱センサーデータを使用して物体を検出する車両システムの能力は、物体とその周囲との間のコントラストを正しく認識して送信するセンサーの能力に依存します。その結果、両方のセンシングモダリティが背景に溶け込むオブジェクトを見逃す可能性があります。熱画像の場合、これは、カメラのように類似した色や目の錯覚ではなく、類似した熱特性の混合に起因します。
対照的に、LiDARは、カメラ、レーダー、および熱センサーのこれらの特徴的な欠点のいずれにも悩まされていません。 LiDARは独自の光源として機能するため、暗闇でも日光でも十分に機能します。また、シーン内の複数のオブジェクトを追跡しながら、正確なリアルタイムの自由空間検出を行うのに十分な高解像度の迅速で正確な測定データを提供します。
現在利用可能な手頃な価格のLiDARベースのPAEBソリューションは、すべての照明条件でパフォーマンスを大幅に向上させます。これは、規制当局や試験機関が評価プロトコルにダークテストを追加した場合に確認されます。
カメラベースおよびレーダーベースのテクノロジーに対するLiDARベースのPAEBシステムのテスト
すぐに利用できるテクノロジーを実装することで夜間のPAEBパフォーマンスの向上を実現できることを実証するために、VelodyneはLiDARベースのPAEBシステムを、カメラとレーダーを中心に構築された高評価のPAEBシステムに対してテストしました。テストは、日没から1時間後、1ルクス未満の周囲照明を使用して、直線軌道で時速30マイルを目標とするドライバー制御の速度で実施されました。
2台のテスト車両はそれぞれ、試験中にロービームヘッドライトを点灯していました。テストで使用された静止した子供と大人の歩行者ダミーターゲットは、IIHSやEuroNCAPなどの組織によって規定された現在のテストプロトコルと互換性がありました。
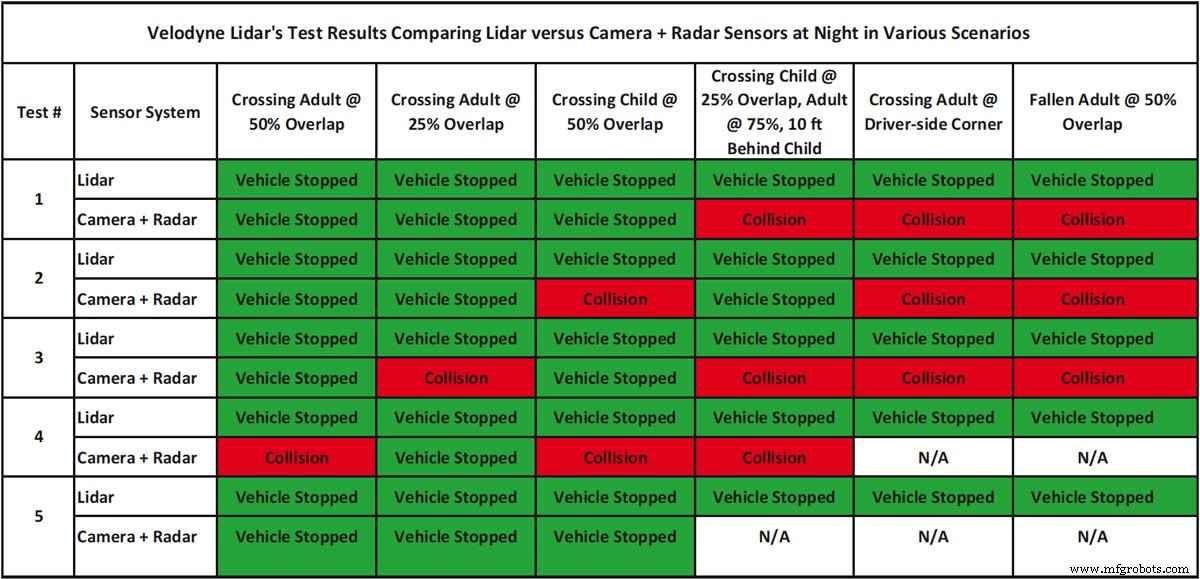
車両が評価されたシナリオは次のとおりです。
-
大人を50%オーバーラップ(テスト車両の幅の中央)で交差させる
-
25%のオーバーラップで成虫を横切る
-
50%のオーバーラップで子を交差させる
-
25%で子供を横切る、75%で大人、子供から10フィート後ろ
-
運転席側の角で大人を横切る
-
50%オーバーラップで倒れた大人
ベロダインは、ターゲットと車両へのダメージを最小限に抑えるために、各シナリオで両方の車両を5回、または車両がターゲットと3回衝突するまでテストしました。
夜間テストの結果は、カメラとレーダーベースのAAAとNHTSAの調査結果を裏付けています
PAEBシステムは、暗い状態で頻繁に故障します。テストでは、子供、複数の歩行者、車両の隅にいる大人、または車両の前で倒れた大人が関与するシナリオで、故障率が特に明白であることがわかりました。
対照的に、VelodyneのVelarray H800センサーとVella™ソフトウェアを搭載したVelodyneLiDARベースのPAEBシステムは、テストされたすべてのシナリオで5回のうち5回のクラッシュを回避するために、時間内に正常に停止しました。これらのハードウェアおよびソフトウェアコンポーネントは、ISO-26262規格で定義されている自動車の機能安全要件に準拠するように開発されています。 VellaとVelarrayを組み合わせた、VelodyneのPAEBソリューションは、時速80マイルまでの都市、郊外、高速道路向けに設計されています。
結論
暗い夜間の状態は歩行者にとって危険であることが示されているため、ベロダインは、車両評価機関がPAEBテストを拡張して1ルクス未満の周囲光の状態を含めることを提案しています。 AAAとNHTSAによって実施されたテストは、夜間のパフォーマンスが現在のPAEBシステムを改善するための主要な機会であることを示しています。テストの結果、LiDARベースのソリューションが効果的であり、実装の準備ができていることがわかりました。
この記事は、Velodyne LiDAR(カリフォルニア州サンノゼ)の創設者兼取締役会長であるDavidHallによって執筆されました。詳細については、ホール氏にお問い合わせください。このメールアドレスはスパムボットから保護されています。表示するにはJavaScriptを有効にする必要があります。または、こちらにアクセスしてください 。
センサー