


計算回路
誰かが「コンピュータ」という言葉に言及するとき、デジタルデバイスが通常頭に浮かぶものです。デジタル回路は、バイナリで数値を表します フォーマット:飽和状態またはカットオフ状態で動作する多数のトランジスタ回路によって表される1と0のパターン。ただし、アナログ回路を使用して、個別のオン/オフ状態の代わりに可変電圧信号を使用することにより、数値を表し、数学的な計算を実行することもできます。
これは、2進数(デジタル)表現と「25」という数字のアナログ表現の簡単な例です。
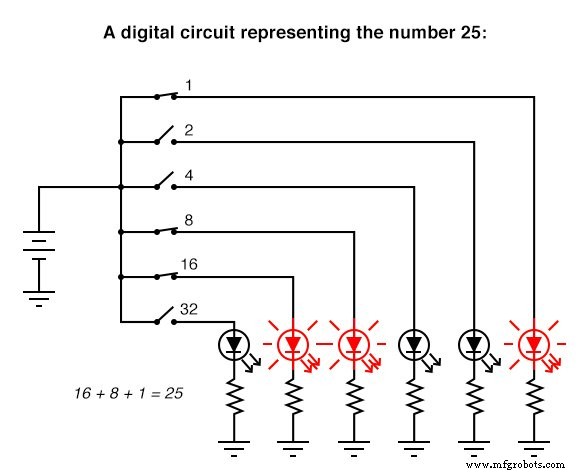
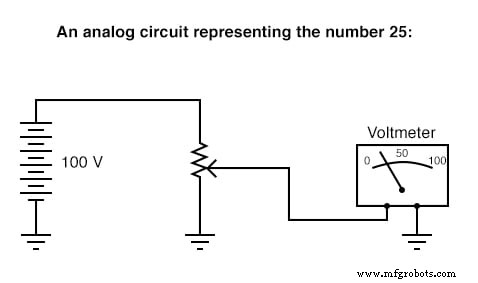
デジタル回路は、アナログ原理に基づいて構築された回路とは大きく異なります。デジタル計算回路は非常に複雑になる可能性があり、人間が鉛筆と紙を使って段階的に算術計算を実行するのと同じように、最終的な答えを得るために計算を連続した「段階」で実行する必要があります。一方、アナログ計算回路は、比較すると非常に単純であり、連続的かつリアルタイムに計算を実行します。ただし、数値を表すためにアナログ回路を使用することには欠点があります。不正確です。上に示したデジタル回路は、25という数字を正確に表しています。上に示したアナログ回路は、25.000ボルトに正確に校正されている場合とされていない場合がありますが、「ドリフト」とエラーが発生する可能性があります。
精度が重要ではないアプリケーションでは、アナログ計算回路は非常に実用的で洗練されています。ここに示されているのは、アナログ計算を実行するためのいくつかのオペアンプ回路です。
計算オペアンプ回路
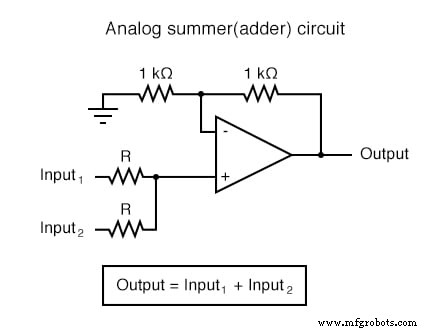
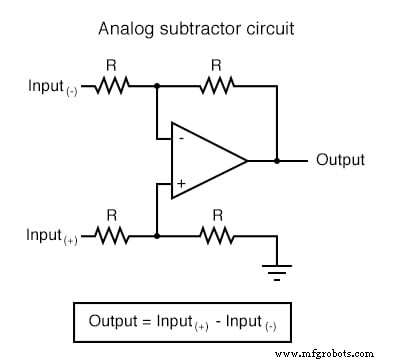
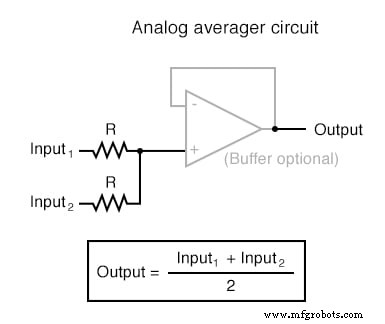
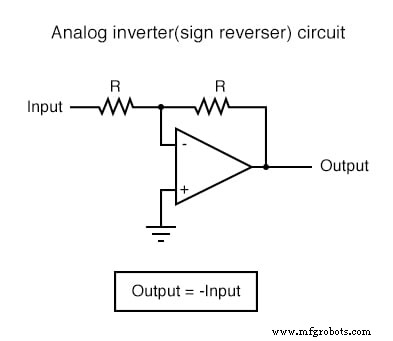
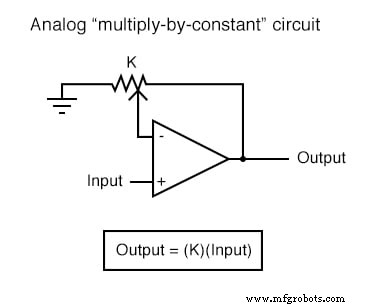
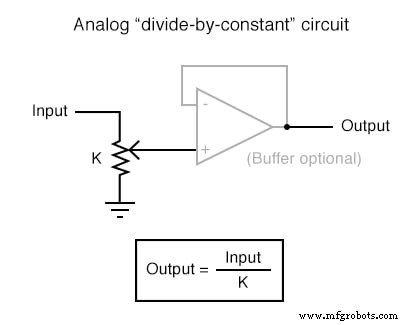
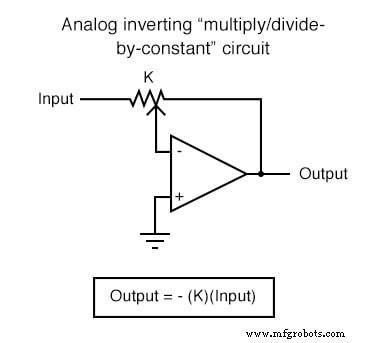
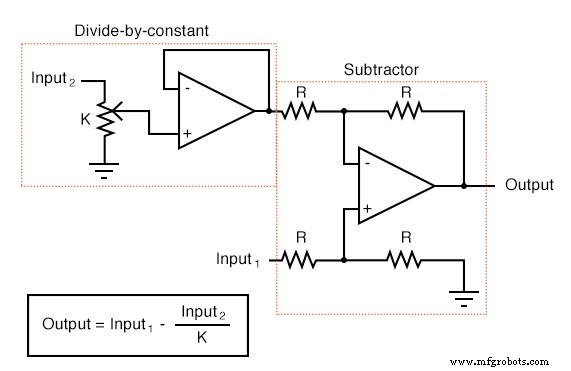
これらの回路のそれぞれをモジュール方式で使用して、複数の計算が可能な回路を作成することができます。たとえば、ある変数の特定の部分を別の変数から減算する必要があるとします。定数除算回路と減算回路を組み合わせることで、必要な関数を得ることができます。
アナログコンピュータと呼ばれるデバイス 以前は大学やエンジニアリングショップで一般的でした。そこでは、通常、基礎となる方程式がわかっている物理プロセスをシミュレートする目的で、数十のオペアンプ回路を取り外し可能なジャンパー線と一緒に「パッチ」して数学ステートメントをモデル化できました。デジタルコンピュータはアナログコンピュータをほとんど時代遅れにしましたが、アナログ計算回路は、必要なコンポーネントの純粋な優雅さと経済性の点でデジタルに勝るものはありません。
アナログ計算回路は、微積分演算の実行に優れています積分 および差別化 時間に関しては、オペアンプのフィードバックループでコンデンサを使用します。ただし、これらの回路の動作とアプリケーションを完全に理解するには、まずこれらの基本的な微積分の概念の意味を理解する必要があります。幸いなことに、微積分を含む現実の問題にオペアンプ回路を適用することは、基本的な微積分を教えるための優れた手段として役立ちます。ジョンI.スミスの言葉を借りれば、彼の傑出した教科書 Modern Operational Circuit Design :
「特定の読者に励ましのメモが提供されます。積分計算は、演算[増幅器]回路が利用する数学的分野の1つであり、その過程で、理解の障壁としてむしろ破壊されます。」> (4ページ)
数学の学習ツールとしてのアナログ回路の教育学的価値に関するスミス氏の感情は独特ではありません。エンジニアのジョージフォックスラングの意見を考えてみてください。彼がジャーナルの2000年8月号に書いた記事 Sound and Vibration 、「アナログはではなかった コンピュータの商標です!」:
「特定の方程式のセットによって制御される実際の物理エンティティ(回路)を作成し、それと相互作用することで、それらの数学的ステートメントに対する独自の洞察が得られます。物理学と数学の相互作用の「腸の感覚」を発達させるには、そのような相互作用を体験するよりも良い方法はありません。アナログコンピュータは、強力な学際的な教育ツールでした。その退行は、さまざまな分野の多くの教育者によって悼まれています。」 (23ページ)
微分は、微積分学の学生を始めることによって通常学ばれる最初の操作です。簡単に言えば、微分とは、ある変数が別の変数に関連する瞬間の変化率を決定することです。アナログ微分回路では、独立変数は時間であるため、私たちが扱っている変化率は、時間に対する電子信号(電圧または電流)の変化率です。
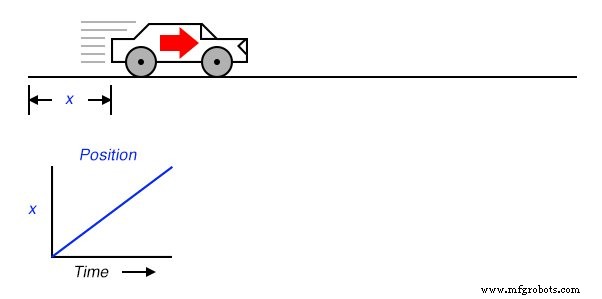
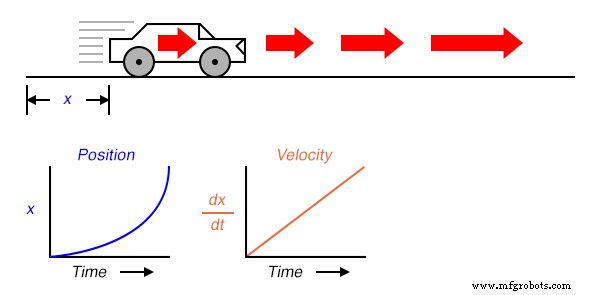
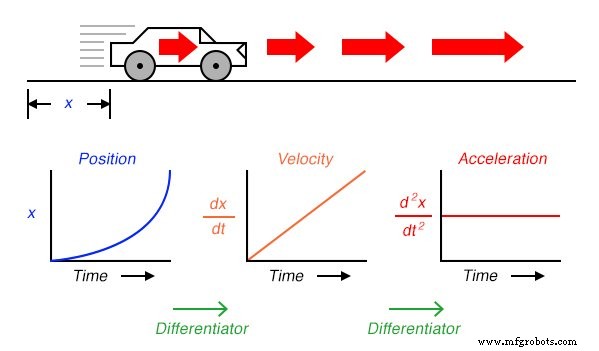
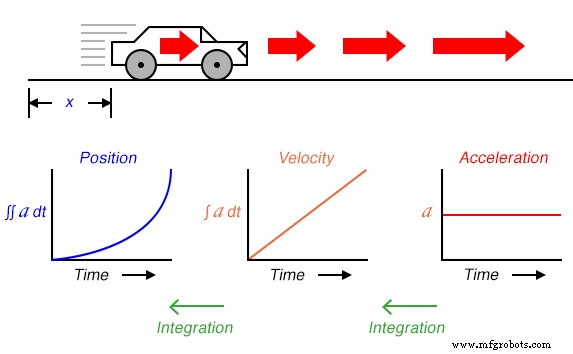
出発点から直接経路(曲がり角なし)を走行する車の位置を測定するとします。この測定値を x と呼びましょう。 。車が「開始」からの距離が時間の経過とともに着実に増加するような速度で移動する場合、その位置は線形としてグラフにプロットされます。 関数(直線):
導関数を計算する場合 時間に対する車の位置の(つまり、時間に対する車の位置の変化率を決定する)と、車の速度を表す量に到達します。微分関数は、分数表記 d / d で表されます。 、したがって、位置を区別する場合( x )時間に関して( t )、結果(導関数)を dx / dt と表記します。 :
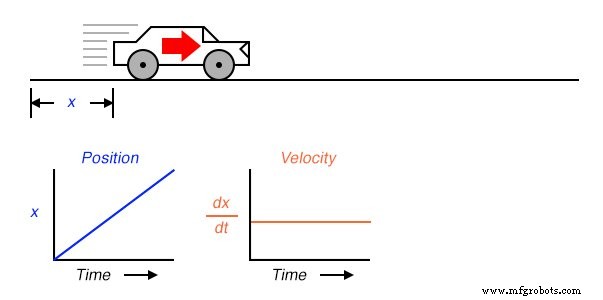
x の線形グラフの場合 時間の経過とともに、位置の導関数( dx / dt )、それ以外の場合、より一般的には速度として知られています 、値が変わらないフラットラインになります。数学関数の導関数は、その勾配としてグラフィカルに理解できます。 グラフにプロットすると、位置( x )グラフの傾きは一定です。つまり、その導関数( dx / dt )は時間の経過とともに一定でなければなりません。
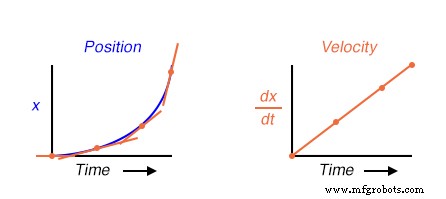
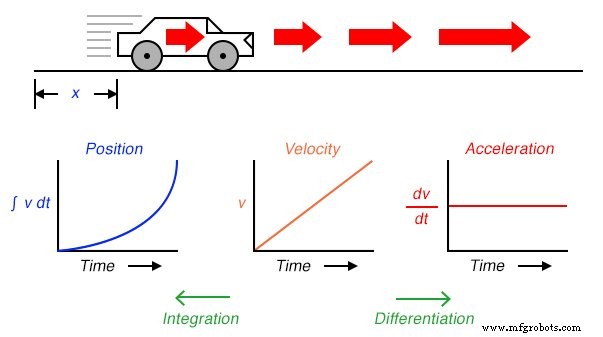
ここで、車の移動距離が時間の経過とともに指数関数的に増加したと仮定します。つまり、車はゆっくりとした動きで移動を開始しましたが、時間の経過とともにさらに多くの距離をカバーしました。次に、位置の導関数( dx / dt )、別名速度( v )、時間の経過とともに一定ではありませんが、増加します:
速度グラフ上のポイントの高さは、位置グラフ上の対応する時間におけるポイントの変化率または勾配に対応します。
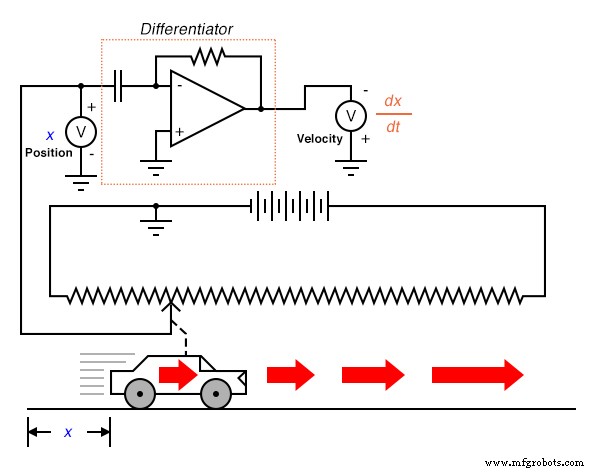
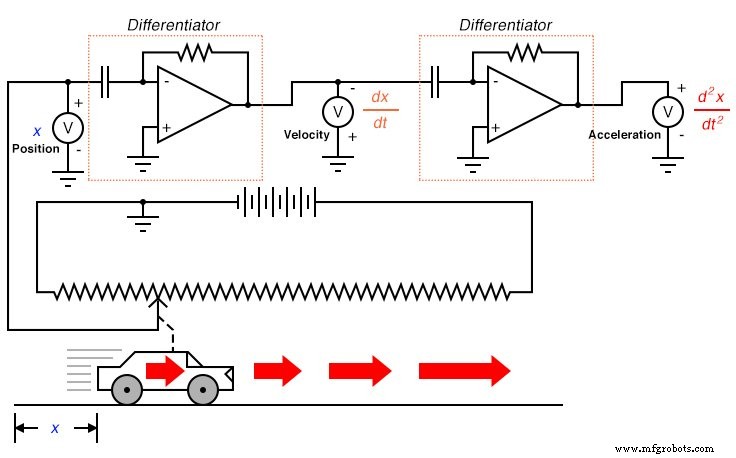
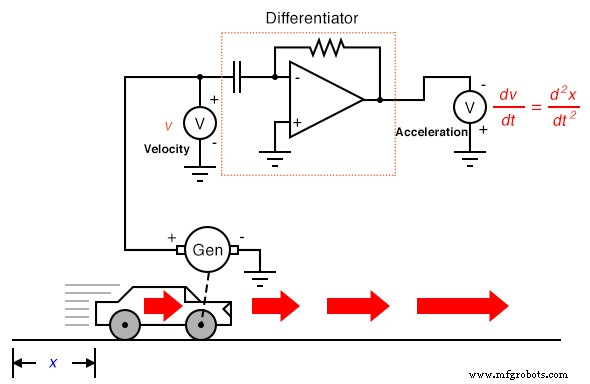
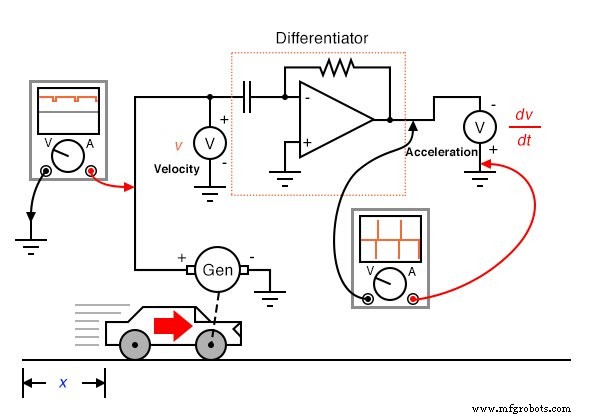
これはアナログ電子回路と何の関係がありますか?さて、アナログ電圧信号で車の位置を表す場合(ワイパーが車に取り付けられ、車の位置に比例した電圧を生成する巨大なポテンショメータを考えてみてください)、微分回路をこの信号に接続して、回路は継続的に計算します 車の速度。微分回路の出力に接続された電圧計を介して結果を表示します。
前の章から、微分回路が入力電圧の経時変化率に比例した電圧を出力することを思い出してください。 ( d / dt )。したがって、入力電圧が一定のレートで時間とともに変化している場合 、出力電圧は一定値になります。時間の経過に伴う経過距離が一定の速度で増加するように車が移動する場合、それは車が一定の速度で走行していることを意味し、微分回路はその速度に比例した一定の電圧を出力します。車の経過距離が時間の経過とともに非定常的に変化する場合、微分回路の出力も同様に非定常になりますが、常に入力の時間の経過に伴う変化率を表すレベルになります。
(微分回路の出力での)電圧計の登録速度は、オペアンプの出力に「逆」極性で接続されていることに注意してください。これは、示されている微分回路が反転であるためです。 :正の入力電圧変化率に対して負の電圧を出力します。電圧計に速度の正の値を登録させたい場合は、図のようにオペアンプに接続する必要があります。巨大なポテンショメータを自動車などの移動物体に接続することは実用的ではないかもしれませんが、概念を明確にする必要があります。位置を表す信号に対して微分の微積分関数を電子的に実行することにより、速度を表す信号を取得します。
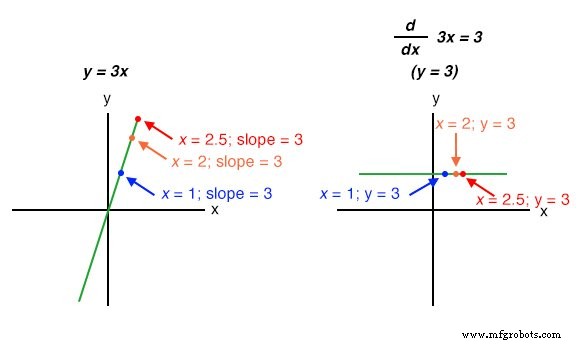
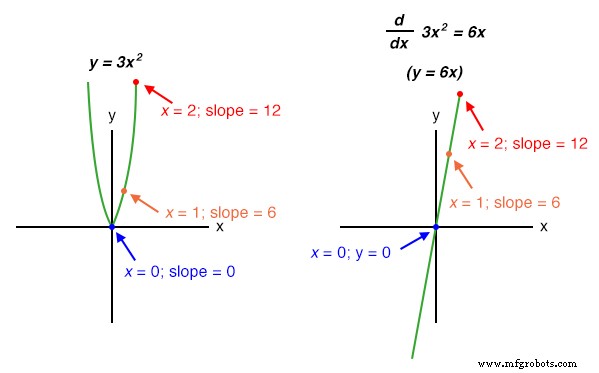
>微積分の初心者の学生は、微分のための象徴的なテクニックを学びます。ただし、これには、元のグラフを表す方程式がわかっている必要があります。たとえば、微積分学の学生は、 y =3x などの関数を使用する方法を学びます。 x に関する導関数を見つけます ( d / dx )、 3 、方程式を操作するだけです。 2つの関数のグラフを比較することにより、この操作の正確さを検証できます。
y =3x 2 などの非線形関数 象徴的な手段によっても区別される場合があります。この場合、 y =3x 2 の導関数 x に関して 6x :
ただし、実際には、 y =3x のような単純な方程式で物理的なイベントの動作を説明できないことがよくあります。 、したがって、微積分学の学生によって学習されたタイプの象徴的な区別は、物理的測定に適用することが不可能な場合があります。誰かが私たちの架空の車の位置の導関数を決定したい場合( dx / dt =速度)象徴的な手段によって、実際の実験から得られた位置測定に基づいて、時間の経過に伴う車の位置を表す方程式を最初に取得する必要があります。位置グラフ。ただし、電圧、電流、および時間に関するコンデンサの動作を利用することによるアナログ微分回路 i =C(dv / dt) は、時間に関連して実際の信号を自然に区別し、瞬間速度( dx / dt )に対応する信号を出力できるようになります。 ) いつでも。チャートレコーダーまたはその他のデータ取得デバイスを使用して、車の位置信号と微分器の出力信号を記録することにより、両方のグラフが検査と分析のために自然に表示されます。
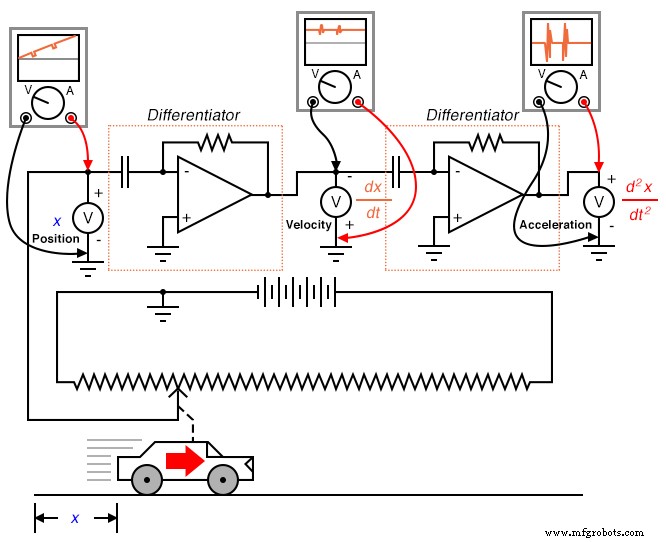
別の微分回路を使用して速度信号に適用することにより、微分の原理をさらに一歩進めることができます。言い換えれば、それを使用して速度の変化率を計算します。これは、位置の変化率であることがわかっています。これを行った場合、どのような実際的な対策に到達するでしょうか?これを、位置と速度の測定に使用する単位の観点から考えてください。出発点からの車の位置をマイルで測定する場合、おそらくその速度を1時間あたりのマイルの単位で表すことになります ( dx / dt )。速度(1時間あたりのマイル数で測定)を時間で区別すると、1時間あたりのマイル数 になります。 。物理学の入門クラスでは、落下物の動作について生徒に教え、メートルで位置を測定します。 、速度(メートル/秒) 、および時間の経過に伴う速度の変化(メートル/秒、/秒) 。この最終的な測定値は加速と呼ばれます :時間の経過に伴う速度の変化率:
式 d 2 x / dt 2 二次導関数と呼ばれます 位置の( x )時間に関して( t )。 2番目の微分回路を最初の出力に接続すると、最後の電圧計が加速度を記録します。
位置から速度を導き出し、速度から加速度を導き出すと、微分の原理が非常に明確に示されていることがわかります。このように相互に関連する物理的な測定値はこれらだけではありませんが、おそらく最も一般的です。微積分のもう1つの例は、液体の流れ( q )間の関係です。 )および液体の量( v )時間の経過とともに容器に蓄積されたもの:
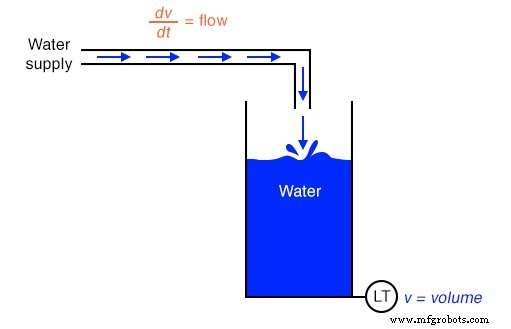
貯水タンクに取り付けられた「レベルトランスミッター」デバイスは、タンク内の水位に正比例する信号を提供します。これは、タンクがその高さ全体で一定の断面積である場合、貯水量に直接等しくなります。このボリューム信号を取得し、時間( dv / dt )で区別する場合 )、水の流量に比例する信号を取得します。 水をタンクに運ぶパイプを通して。この体積信号を受信するように接続された微分回路は、流量に比例した出力信号を生成し、パイプに取り付けられた流量測定装置(「流量送信機」)の代わりになる可能性があります。
車の実験に戻って、私たちの架空の車が車輪の1つにタコジェネレーターを備えていて、速度に正比例する電圧信号を生成するとします。次のように、信号を区別して1つの回路で加速度を得ることができます。
タコジェネレータは、その性質上、時間に対して車の位置を区別し、時間の経過とともに車輪の角位置が変化する速度に比例した電圧を生成します。これにより、すでに速度を表す生の信号が提供され、加速度信号を取得するために必要な微分のステップは1つだけです。もちろん、速度を測定するタコジェネレータは、物理的な位置を測定する巨大なポテンショメータよりもはるかに実用的な自動車計装の例ですが、実際に得られるものは、位置測定では失われます。何度区別しても、速度信号から車の位置を推測することはできません。微分のプロセスが位置から速度、加速へと私たちを導いた場合、どういうわけか、速度から位置へと進むために微分の「逆」プロセスを実行する必要があります。このような数学的プロセスは存在し、統合と呼ばれます。 。 「積分器」回路は、時間に関してこの積分機能を実行するために使用できます。
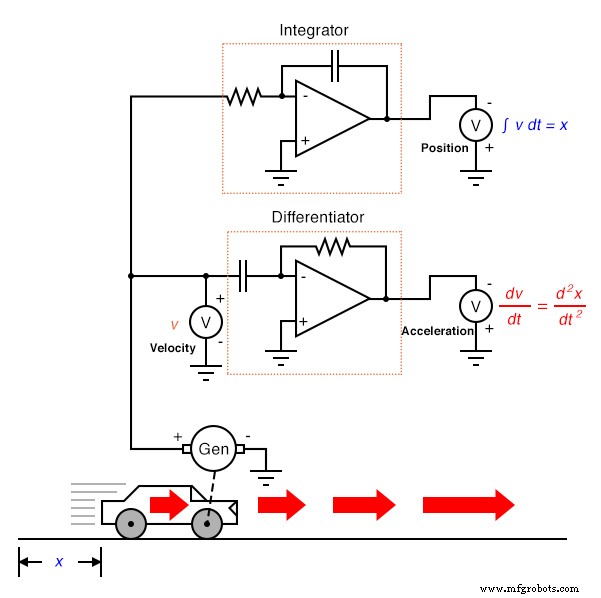
前の章から、積分器回路が、時間の経過に伴う変化率が入力電圧の大きさに比例する電圧を出力することを思い出してください。したがって、入力電圧が一定の場合、出力電圧は変化します。 一定のレートで 。車が一定の速度(タコジェネレータから積分器回路に入力される定電圧)で移動する場合、移動距離は時間の経過とともに着実に増加し、積分器はその距離に比例して着実に変化する電圧を出力します。車の速度が一定でない場合、時間の経過に伴う変化率も積分器回路の出力にはなりませんが、出力電圧は 任意の時点で車が移動した距離を忠実に表現します。
統合の記号は、非常に細い筆記体の文字「S」(∫)のように見えます。この記号を利用した方程式(∫ v dt =x )は、速度( v )時間に関して( dt )、および位置の取得( x )結果として。
したがって、車の動きの3つの測定値(位置、速度、加速度)を速度( v )で表すことができます。 )位置( x )に関して可能な限り簡単に ):
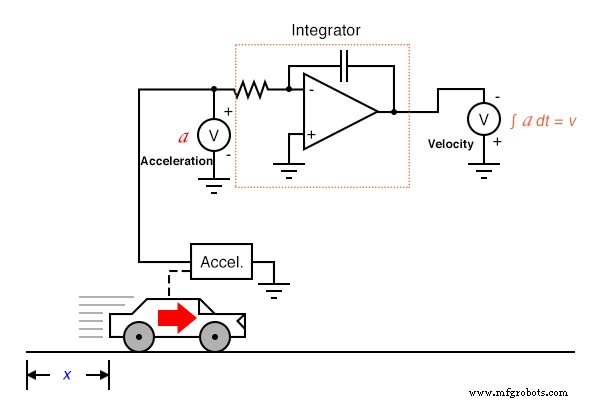
車に加速度計を取り付けて、加速または減速の速度に比例する信号を生成する場合、(仮想的に)1つの積分ステップで速度信号を取得し、2番目の積分ステップで位置信号を取得できます。
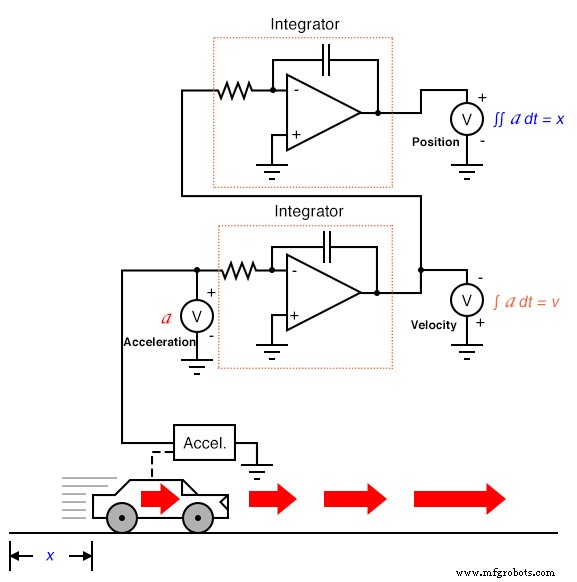
したがって、車の動きの3つの測定値(位置、速度、加速度)はすべて、加速度で表すことができます。
ご想像のとおり、統合のプロセスは、他の物理システムにも示され、適用される場合があります。先に示した貯水タンクと流れの例を例にとってみましょう。流量が導関数の場合 時間に対するタンク容量の割合( q =dv / dt )、ボリュームは積分であるとも言えます。 時間に対する流量の変化:
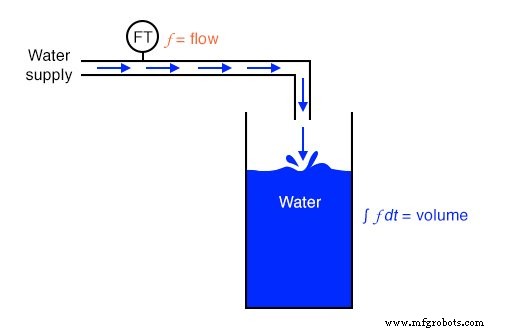
「フロートランスミッター」デバイスを使用して水の流れを測定する場合、時間積分により、時間の経過とともにタンクに蓄積された水の量を計算できます。理論的には、容量性オペアンプ積分回路を使用してフロー信号からボリューム信号を導出することは可能ですが、機械式およびデジタル電子式の「積分器」デバイスは、長期間にわたる積分に適しており、水中で頻繁に使用されます。処理および流通業界。
差別化のための象徴的な手法があるのと同じように、統合のための象徴的な手法もありますが、それらはより複雑で多様である傾向があります。ただし、自動車の加速度などの現実の問題に記号積分を適用することは、測定信号を正確に記述する方程式が利用できるかどうかにかかっています。多くの場合、測定データから導き出すのは困難または不可能です。ただし、電子積分回路は、この数学関数を継続的に、リアルタイムで、任意のに対して実行します。 入力信号プロファイルにより、科学者やエンジニアに強力なツールを提供します。
そうは言っても、あるタイプの測定値を別のタイプの測定値から導出するために微積分技術を使用することには注意が必要です。微分は、測定された変数に見られる「ノイズ」を増幅するという望ましくない傾向があります。これは、ノイズは通常、測定された変数よりもはるかに高い周波数として表示され、高周波はその性質上、時間の経過とともに高い変化率を示すためです。
この問題を説明するために、摩耗したブラシまたは整流子バーを備えたタコジェネレータから取得した速度信号から車の加速度の測定値を導出していると仮定します。ブラシと整流子の接触が不十分な点では、タコジェネレータの出力電圧に瞬間的な「ディップ」が発生し、それに接続された微分回路は、これらのディップを速度の非常に急速な変化として解釈します。加速も減速もしない一定速度で移動する車の場合、加速信号は0ボルトである必要がありますが、タコジェネレータの故障によって引き起こされる速度信号の「ノイズ」により、微分(加速)信号に「スパイク」が含まれ、誤って示されます。短時間の高加速と高減速:
微分される信号に存在するノイズ電圧は、問題を引き起こすために大きな振幅である必要はありません。必要なのは、ノイズプロファイルの立ち上がり時間または立ち下がり時間が速いことだけです。つまり、 dv / dt が高い電気ノイズ コンポーネントは、振幅が小さい場合でも、微分すると問題が発生します。
この問題は、アナログ回路のアーティファクト(測定/計算機器の特異体質エラー)ではないことに注意してください。むしろ、それは分化のプロセスに固有のものです。微分をどのように実行しても、速度信号の「ノイズ」は常に出力信号を破壊します。もちろん、位置信号から速度と加速度の両方を取得するために行ったように、信号を2回微分する場合、最初の微分回路によって出力された増幅されたノイズ信号は、次の微分器によって再び増幅されるため、問題が複雑になります。
積分器はローパスフィルターとして機能し、高周波入力信号を減衰させるため、積分にはこの問題はありません。実際には、信号のノイズに起因するすべての高ピークと低ピークが時間の経過とともに平均化され、正味の結果が減少します。したがって、加速度を直接測定し、その信号を積分して速度を取得することで、すべての問題を回避できると考える人もいるかもしれません。実際には、前に示した方法から「逆」で計算します。
残念ながら、この方法論に従うと、他の問題が発生する可能性があります。その1つは、ドリフトとして知られるアナログ積分回路の一般的なアーティファクトです。 。すべてのオペアンプにはある程度の入力バイアス電流があり、この電流により、入力電圧信号の結果として蓄積される電荷に加えて、コンデンサに電荷が蓄積する傾向があります。言い換えると、すべてのアナログ積分回路は、電圧入力がまったくない場合でも出力電圧が「ドリフト」または「クリープ」する傾向があり、その結果、時間の経過とともにエラーが蓄積されます。また、不完全なコンデンサは、内部抵抗のために時間の経過とともに蓄積された電荷を失う傾向があり、その結果、出力電圧がゼロに向かって「ドリフト」します。これらの問題は アナログ回路のアーティファクトであり、デジタル計算を使用することで排除できます。
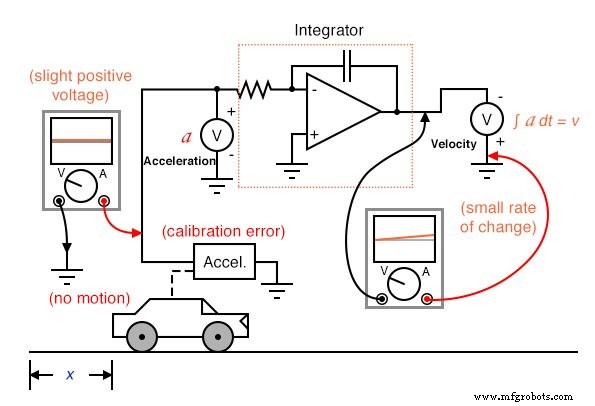
回路のアーティファクトにもかかわらず、積分のしくみのために、ある測定値(加速度など)を積分して別の測定値(速度など)を取得すると、エラーが発生する可能性があります。生信号センサーの「ゼロ」キャリブレーションポイントが完全でない場合、何も出力しないはずの条件でも、わずかに正または負の信号を出力します。加速度計のキャリブレーションが不完全な車、または重力の影響を受けて車の動きとは関係のないわずかな加速度を検出する車を考えてみます。完全な統合コンピューターを使用している場合でも、このセンサーエラーにより、インテグレーターはエラーを累積し、車が加速も減速もしていないときに速度の変化を示す出力信号が発生します。
微分と同様に、最初の積分器の「ドリフト」出力はすぐに次の積分器が積分するための有意な正または負の信号を提示するため、積分信号が別の積分器回路に渡される場合、このエラーもさらに悪化します。したがって、センサー信号を統合するときは注意が必要です。センサーの「ゼロ」調整が完全ではない場合 、積分回路自体が完全であっても、積分結果はドリフトします。
これまでのところ、説明されている統合エラーは、本質的に人為的なものだけでした。回路とセンサーの欠陥に起因しています。統合のプロセス自体に固有のエラーの原因も存在します。それは不明な定数です。 問題。微積分の初心者は、関数が統合されるたびに、未知の定数(通常は変数 C として表される)が存在することを学びます。 )結果に追加されました。この不確実性は、定数値の追加のみが異なるいくつかの関数の導関数を比較することで最も理解しやすくなります。
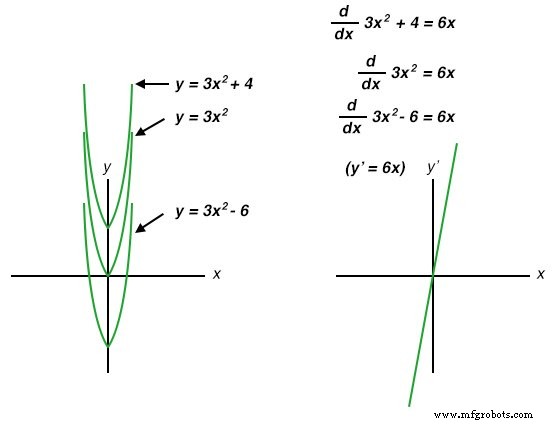
それぞれの放物線( y =3x 2 )に注意してください。 + C )垂直方向のオフセットに関して互いに異なる、まったく同じ形状を共有します。ただし、これらはすべてまったく同じ微分関数を共有します。 y ’=(d / dx)(3x 2 + C)=6x 、それらはすべて同じ変化率を共有しているためです (勾配) x に沿った対応するポイント 軸。これは非常に自然で、微分(共通の導関数を共有する異なる方程式)の観点からは予想されますが、関数の積分には複数の正解があるため、通常、統合の観点からは初心者の学生を奇妙に感じます。方程式からその導関数に進むと、答えは1つだけですが、その導関数から元の方程式に戻ると、さまざまな正しい解が得られます。この不確実性に敬意を表して、統合のシンボリック関数は不定積分と呼ばれます。 。
積分器が時間に関してライブ信号積分を実行する場合、出力は時間の経過に伴う積分入力信号の合計です 任意の大きさの初期値。積分が開始された時点での積分器の既存の出力を表します。たとえば、都市から離れた直線を走行する車の速度を積分すると、2時間にわたって時速50マイルの一定速度を計算すると、距離(∫ v dt )100マイルの場合、それは必ずしも車が2時間後に都市から100マイル離れることを意味するわけではありません。車が100マイルさらにになるということだけがわかります 2時間の運転の後、街から離れます。 2時間の運転後の都市からの実際の距離は、統合が開始されたときの都市からの車の距離によって異なります。この距離の初期値がわからない場合、2時間の運転後の都市からの車の正確な距離を特定することはできません。
これと同じ問題は、速度を取得するために時間に関して加速度を統合するときに発生します。
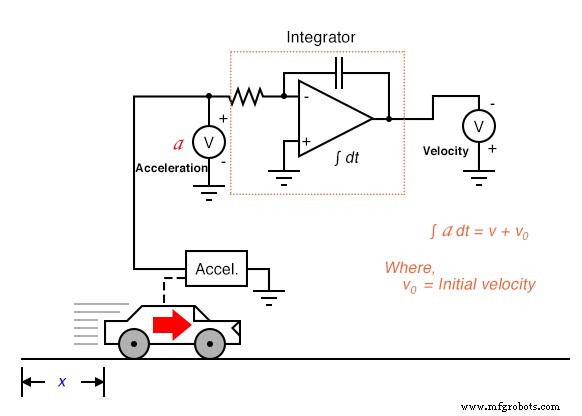
このインテグレーターシステムでは、計算された車の速度は、インテグレーター回路が初期化されている場合にのみ有効になります。 車が静止しているときの出力値はゼロになります( v =0)。そうでなければ、積分器は速度( v 0 )に対してゼロ以外の信号を出力している可能性があります。 )車が静止しているとき、加速度計は静止状態(時速0マイル)と一定速度の状態(時速60マイル、変化しない)の違いを区別できないためです。積分器出力のこの不確実性は、積分プロセスに固有のものであり、回路やセンサーのアーティファクトではありません。
要約すると、物理的な測定で最大の精度が必要な場合は、他の測定から計算するのではなく、その変数を直接測定するのが最善です。これは、計算が無価値であるということではありません。まったく逆に、多くの場合、これが目的の測定値を取得するための唯一の実用的な手段です。ただし、正確な測定値を取得するには、計算の限界を理解して尊重する必要があります。
関連ワークシート:
- 線形計算回路ワークシート
産業技術