リバース自動販売機(RVM)
コンポーネントと消耗品
>  | | × | 1 | |
 | | × | 1 | |
 | | × | 2 | |
 | | × | 1 | |
 | | × | 2 | |
 | | × | 1 | |
| | | × | 2 | |
| | | × | 1 | |
 | | × | 1 | |
 | | × | 1 | |
 | | スイッチアクチュエータ、スプリングリターンプッシュボタン用ヘッド | > | × | 1 | |
 | | × | 2 | |
| | | × | 1 | |
 | | × | 1 | |
 | | × | 1 | |
 | | × | 2 | |
このプロジェクトについて
動機:
ペットボトルはどこに行き着くのですか?
埋め立て地、海、川、歩道に浮かんでいます。 1平方マイルあたり46,000個のプラスチックごみが海に浮かんでいると概算されました。このプラスチックは動物を殺し、化学物質を漏らし、生態系を破壊しています。各ボトルは分解するのに最大1000年かかることがあり、プロセス中に危険で有害な化学物質が漏れます。漏れた毒素の中には、ガンや生殖障害を引き起こす可能性のあるものがあります。プラスチックを燃やすと、一酸化炭素、塩素、塩酸塩、フラン、亜硝酸塩などの有毒物質が発生します。残念ながら、リサイクルの議論はその場合にはほとんど効果がありません。1年間に使用される350億本のボトルのうち12%しかリサイクルされないため、実際にリサイクルされるのはごみ箱に入れたものの半分にすぎないことを示しています。
IDEA:
プラスチックおよび金属廃棄物処理用のスマートマシンは、プラスチック廃棄物(ボトル)と金属缶をリサイクル用に受け入れ、その見返りに、廃棄物をリサイクルするオペレーターにウォレット内のパイントを分配するシステムです。リバースベンディングマシンには、さまざまな種類のボトルを区別するための近接センサーが装備されており、ユーザーがWebサイトにコードを入力するとポイントが得られます。本発明は、一般に、廃棄物管理およびプラスチックおよび金属廃棄物(ボトル)のリサイクルに関するものです。環境。環境中のプラスチック廃棄物のポイ捨てとプラスチックのリサイクル意欲の低下は、環境とすべての生物に継続的な問題をもたらします。
動作中:
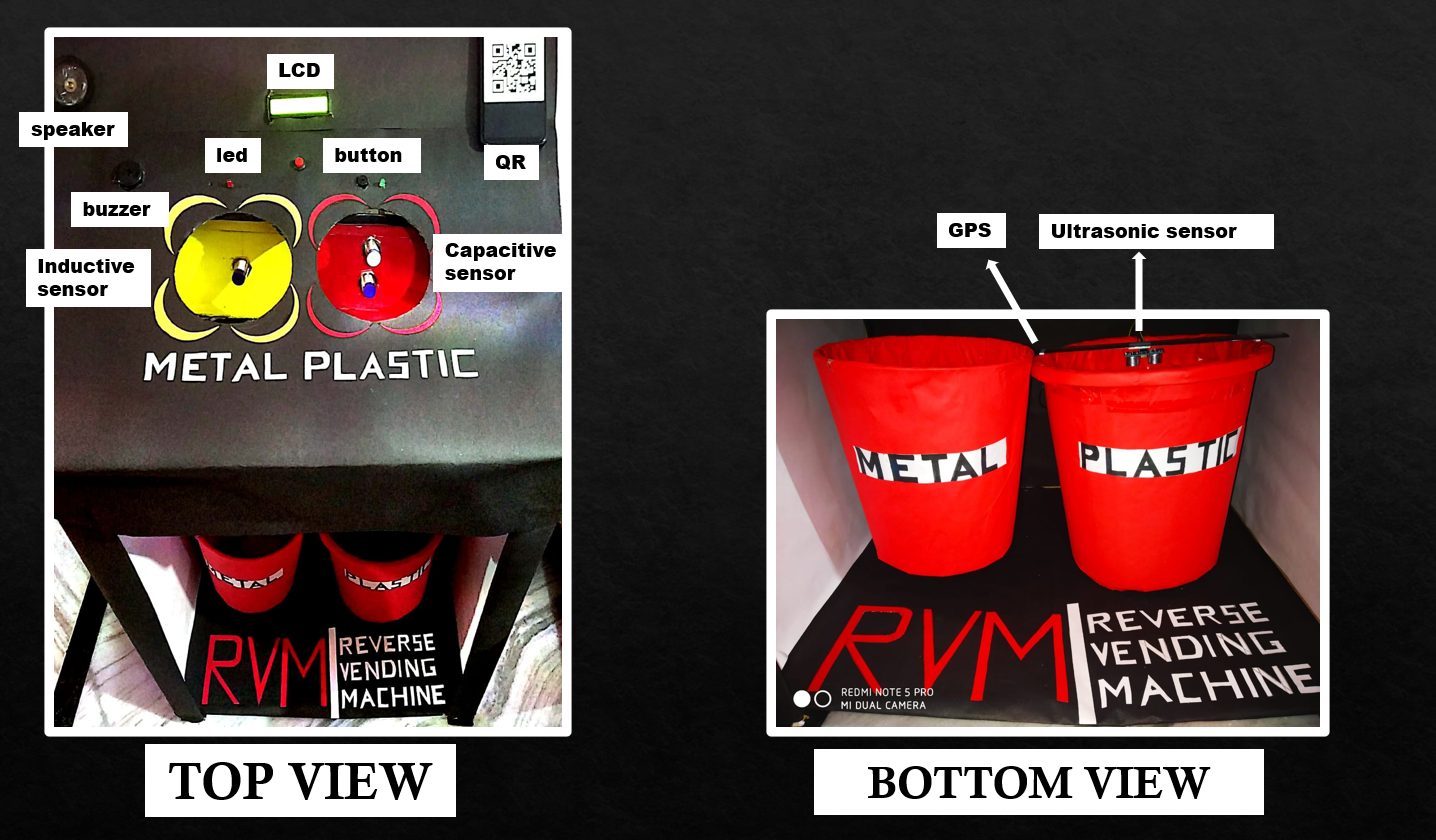
リバース自動販売機は、使用済みの飲料容器を受け取り、ユーザーにお金を返すデバイスです(通常の自動販売サイクルの逆)。この機械は、リサイクル法やコンテナデポジット法が義務付けられている場所で人気があります。
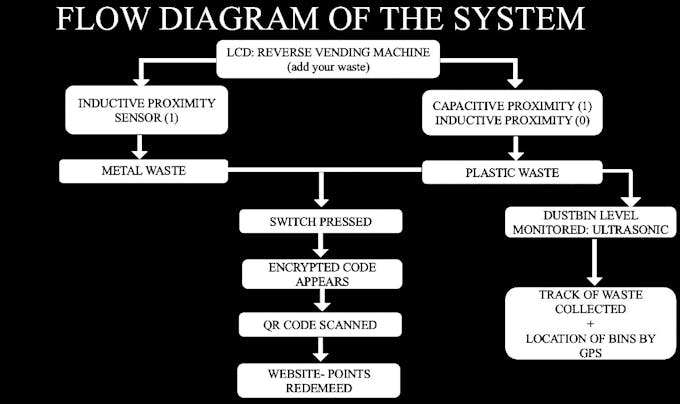
基本的な操作には、リサイクル業者が空のボトル/缶を受け入れ口に入れるステップが含まれます。水平インフィードシステムにより、ユーザーは一度に1つずつコンテナを挿入できます。次に、容量性および誘導性近接センサーを使用して、ボトル/缶が自動的にスキャンされます。誘導センサーのセンサー値が1の場合、オブジェクトはプラスチックであり、誘導センサーのセンサー値が0で、静電容量センサーの値が1の場合、オブジェクトはプラスチックです。
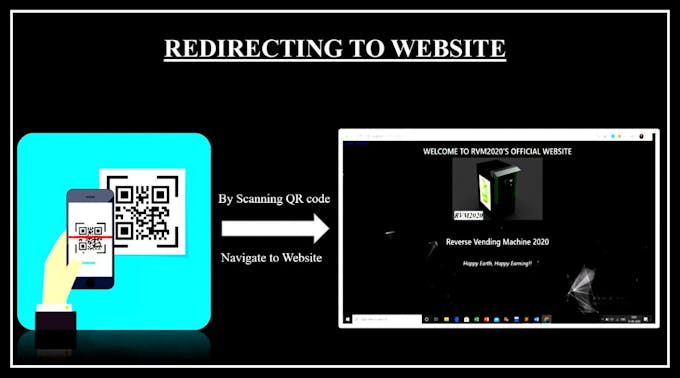
報酬システムに関しては、飲料容器がリサイクルされるときに、RVMはコインやクーポンなどの貴重なトークンを配布します。クーポンは、カウンターでギフトを引き換えるために使用されます。しかし、環境問題への意識と紙の使用量削減を目的として、クーポンの印刷はあまり好まれていません。したがって、提案されたシステムでは、プラスチックが検出されると、暗号化されたコードがLCD画面に表示されます。次に、ユーザーはマシンに存在するORコードをスキャンして、Webサイトに移動し、LCD画面に表示されたコードを入力してポイントを利用する必要があります。
逆プラスチック自動販売機のウェブサイトにアカウントを持っているユーザーのためのデータベースがあります。プラスチックを処分するためのポイントを利用するには、ウェブサイトにログインするためのアカウントを持っている必要があります。
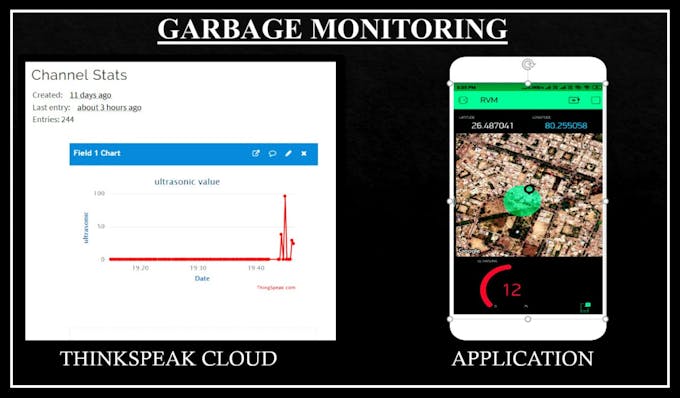
マシンにはもう1つの機能があります。マシンがいっぱいの場合は、ガベージコレクターまたはリサイクルベンダーがアプリケーションの助けを借りて通知されます。機械がいっぱいになると、超音波センサーとNodeMCUを使用して機械のレベルが監視され、コレクターに通知され、全地球測位システムを使用して機械の正確な位置が送信されます。
コード
廃棄物の分別 C / C ++
#include //#include "Arduino.h" //#include "Button.h" #include LiquidCrystal lcd(1,2,4,5,6,7); const int knapp =3; int ButtonState =0; // buttonintの現在の状態oldButtonState =0; const int ledPin1 =10; const int ledPin2 =11; const int buzz1 =12; const int buzz2 =13; const intplasticsensor =A0; int metalensor =A1; int metalensor_M =A2; Servo myservo; Servo myservo_M; int pos =90; int pos_M =360; void setup(){pinMode(knapp、INPUT); digitalWrite(knapp、LOW); lcd.begin(16,2); lcd.clear(); myservo.attach(9); myservo_M.attach(8); pinMode(plasticsensor、INPUT_PULLUP); pinMode(metalsensor、INPUT_PULLUP); pinMode(metalsensor_M、INPUT_PULLUP); pinMode(ledPin1、OUTPUT); pinMode(ledPin2、OUTPUT); pinMode(buzz1、OUTPUT); pinMode(buzz2、OUTPUT); Serial.begin(9600);} void loop(){lcd.setCursor(0,0); lcd.print( "INSERT METAL ON"); lcd.setCursor(0,1); lcd.print( "RIGHT SIDE"); delay(6000); lcd.clear(); int Sensor_read =digitalRead(plasticsensor); Serial.println( "プラスチックセンサー"); Serial.println(sensor_read); //遅延(10); int Sensor_read_m =digitalRead(metalsensor); //プラスチックビンSerial.println( "metal Sensor1"); Serial.println(sensor_read_m); //遅延(10); int Sensor_read_mm =digitalRead(metalsensor_M); Serial.println(sensor_read_mm); //遅延(10); if((sensor_read ==1)&&(sensor_read_m!=1)){for(pos =90; pos <=240; pos + =1){// 0度から180度に// 1度ずつ移動myservo.write(pos); //サーボに変数 'pos'の位置に移動するように指示します// delay(5); digitalWrite(ledPin1、HIGH); digitalWrite(buzz1、HIGH); //サーボが位置に到達するまで15ms待機します} // delay(5000); for(pos =240; pos> =90; pos- =1){// 0度から180度に// 1度ずつ移動myservo.write(pos); // delay(5); }} else {// 180度から0度になりますdegrmyservo.write(pos); digitalWrite(ledPin1、LOW); digitalWrite(buzz1、LOW); } if((sensor_read_mm ==1)&&(sensor_read ==0)){for(pos_M =360; pos_M> =50; pos_M- =1){// 0度から180度に// 1刻みで移動度myservo_M.write(pos_M); // delay(5); digitalWrite(ledPin2、HIGH); digitalWrite(buzz2、HIGH); } //変数 'pos'の位置に移動するようにサーボに指示します// delay(5000); for(pos_M =50; pos_M <=360; pos_M + =1){// 180度から0度になりますmyservo_M.write(pos_M); //サーボに変数 'pos'の位置に移動するように指示します// delay(5); //サーボが位置に到達するまで15ms待機します}} else {myservo_M.write(pos_M); digitalWrite(ledPin2、LOW); digitalWrite(buzz2、LOW); }}
ゴミ箱レベルの監視 C / C ++
#include "ThingSpeak.h" #include #include #include #include #define BLYNK_PRINT Serial #define TRIGGER2 5#define ECHO2 4WiFiClient client; static const int RXPin =4、TXPin =5; // GPIO 4 =D2(GPSのTxを接続)およびGPIO 5 =D1(GPSstatic const uint32_tGPSBaudのRxを接続; //ボーレート9600が機能しなかった場合は、4800unsigned long myChannelField =1067056を使用します; / / Channel IDconst int ChannelField =1; // dataconstを書き込むチャネルchar * myWriteAPIKey ="FMV95MD2A1J7Y8SP"; //書き込みATinyGPSPlusgps; // TinyGPS ++ objectWidgetMap myMap(V0); // MapWidgetSoftwareSerialの仮想ピンのV0ss (RXPin、TXPin); // GPSデバイスへのシリアル接続BlynkTimerタイマー; // Blynkで認証トークンを取得する必要がありますApp.charauth [] ="YVvgHBx9fIM1-yR_2XrGXXkKdIuEmrYL"; // WiFi資格情報を設定します。//パスワードを設定します。 to "" for open network.char ssid [] ="diksha"; char pass [] ="diksha19"; unsigned int move_index =1; void setup(){Serial.begin(115200); ss.begin(GPSBaud); Blynk.begin(auth、ssid、pass); // timer.setInterval(5000L、checkGPS); pinMode(TRIGGER2、OUTPUT); pinMode(ECHO2、INPUT); pinMode(BUILTIN_LED、OUTPUT); WiFi.mode(WIFI_STA); ThingSpeak。 begin(client);} / * void checkGPS(){if(gps.charsProcessed()<10){Serial.println(F( "GPSが検出されませんでした:配線を確認してください。")); }} * / void loop(){if(WiFi.status()!=WL_CONNECTED){Serial.print( "SSIDに接続しようとしています:"); Serial.println(ssid); while(WiFi.status()!=WL_CONNECTED){WiFi.begin(ssid、pass); Serial.print( "。"); delay(100); } Serial.println( "\ nConnected。"); } while(ss.available()> 0){//スケッチは、新しい文が正しくエンコードされるたびに情報を表示します。 if(gps.encode(ss.read()))Serial.println( "GPS Connected"); // displayInfo(); {if(gps.location.isValid()){float Latitude =(gps.location.lat()); //緯度を保存します。とロン。フロート経度=(gps.location.lng()); Serial.print( "LAT:"); Serial.println(緯度、6); //小数点以下x桁まで浮動小数点Serial.print( "LONG:"); Serial.println(経度、6); ThingSpeak.setField(3、緯度); ThingSpeak.setField(4、経度); ThingSpeak.writeFields(myChannelField、myWriteAPIKey); Blynk.virtualWrite(V1、String(latitude、6)); Blynk.virtualWrite(V2、String(longitude、6)); myMap.location(move_index、緯度、経度、 "GPS_Location"); }}} // long duration1、distance1;長いduration2、distance2; digitalWrite(TRIGGER2、LOW); delayMicroseconds(2); digitalWrite(TRIGGER2、HIGH); delayMicroseconds(10); digitalWrite(TRIGGER2、LOW); duration2 =pulseIn(ECHO2、HIGH); distance2 =(duration2 / 2)/ 29.1; if(distance2 <=5){Blynk.notify( "ごみ箱を空にしてください");} Serial.println( "2超音波センチメートル:"); Serial.println(distance2); Blynk.virtualWrite(V6、distance2); ThingSpeak.writeField(myChannelField、ChannelField、distance2、myWriteAPIKey); delay(100); Blynk.run(); timer.run();}
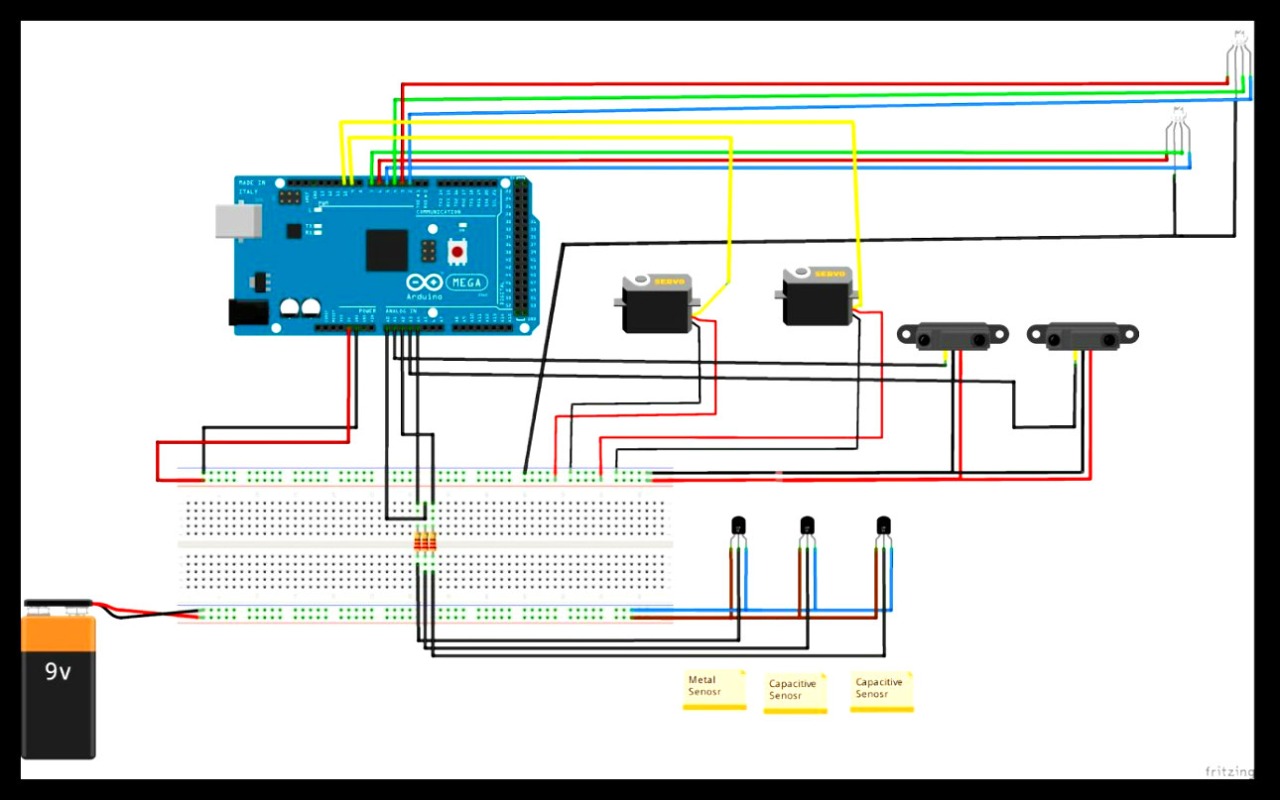
回路図