


Wi-Servo:Wi-Fiブラウザ制御サーボモーター
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
このプロジェクトでは、通常のインターネットブラウザ(Firefoxなど)を使用して、Wi-Fiネットワークで一部のサーボモーターをリモートで制御する方法を示します。これは、おもちゃ、ロボット、ドローン、カメラのパン/ティルトなど、いくつかのアプリケーションで使用される可能性があります。
モーターは、ESP-8266モジュールを介してWi-Fiネットワークを接続するArduinoUnoに接続されていました。コントロールインターフェイスは、HTMLとjQueryを使用して設計されました。
ESP-8266を使用してLEDをオン/オフにする方法を示すMiguelのチュートリアル(http://allaboutee.com/2015/01/02/esp8266-arduino-led-control-from-webpage/)は、このためのインスピレーションとして役立ちました投稿。
ここに示されている手法は、私のプロジェクトの1つである「RobôdaAlegria」で使用されています。これについて詳しくは、次のリンクのいずれかをご覧ください。
https://hackaday.io/project/12873-rob-da-alegria-joy-robot
https://www.facebook.com/robodaalegria/
https://github.com/ferauche/RoboAlegria
ステップ1:電子機器 <図>
 <図>
<図>  <図>
<図> 
このプロジェクトでは、次のコンポーネントが必要です。
- Arduino Uno(購入)
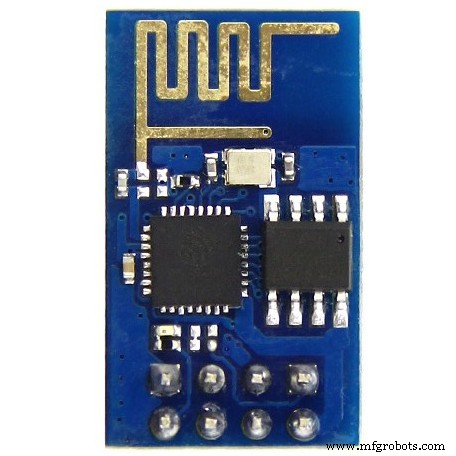
- ESP8266(購入)
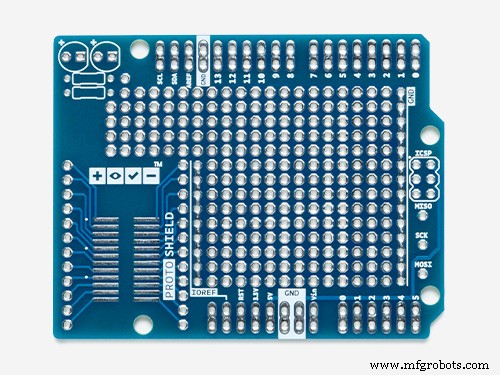
- プロトシールド(よりコンパクトなバージョンの場合)または通常のブレッドボード(購入)
- 10kオーム抵抗(x3)
- いくつかのジャンパー線
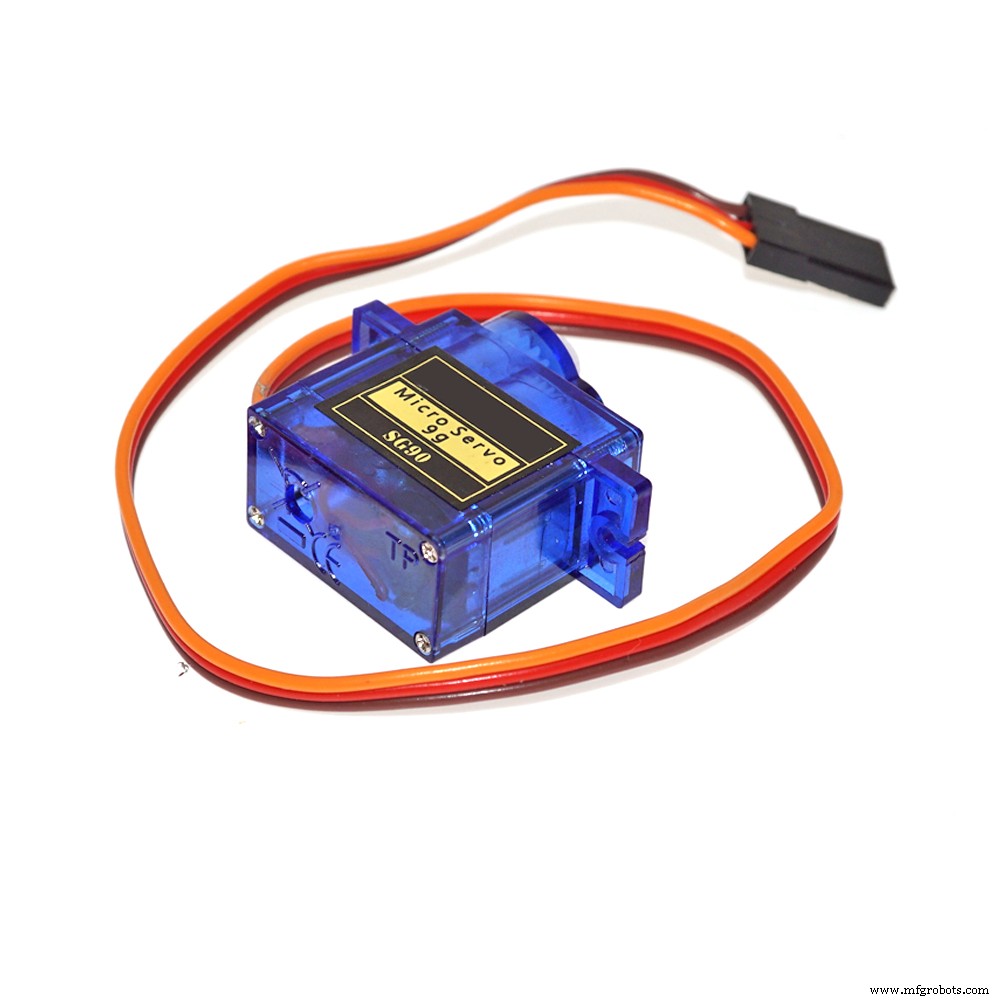
- SG90サーボモーター(x2)(購入)
- コンピューター(Arduinoコードのコンパイルとアップロード用)
このプロジェクトの組み立てに特定のツールは必要ありません。すべてのコンポーネントは、お気に入りのeコマースストアでオンラインで見つけることができます。回路はUSBポート(コンピューターまたは通常の電話充電器に接続)から電力を供給されますが、外部DC電源またはArduino電源ジャックに接続されたバッテリーを追加することもできます。
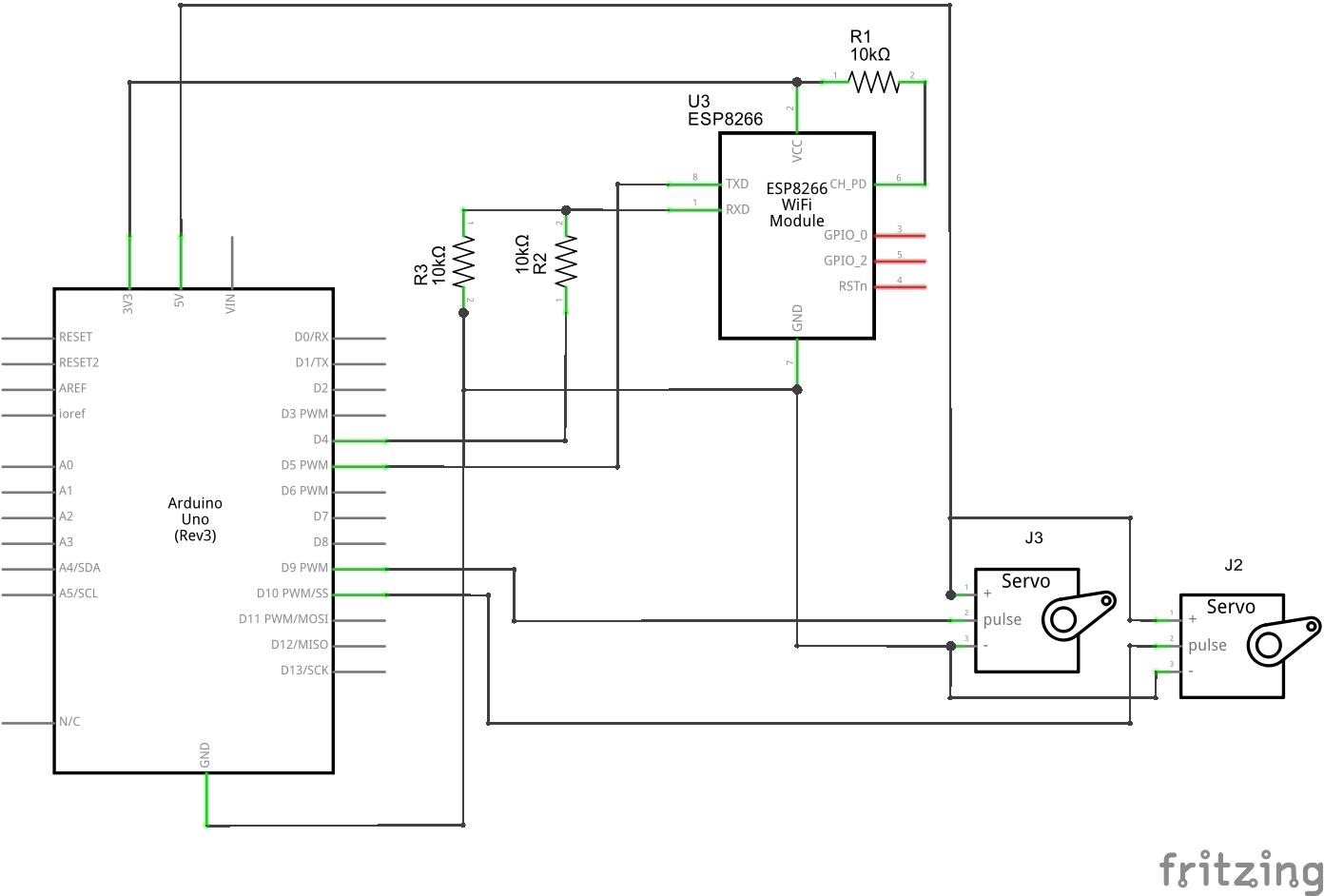
ステップ2:組み立て <図>
 <図>
<図> 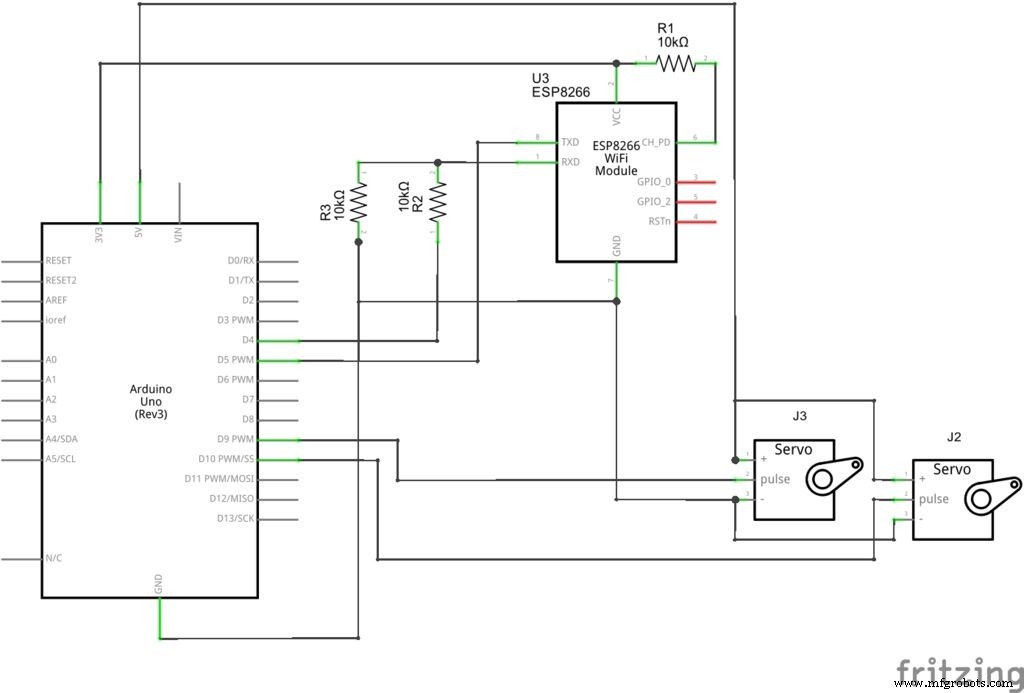
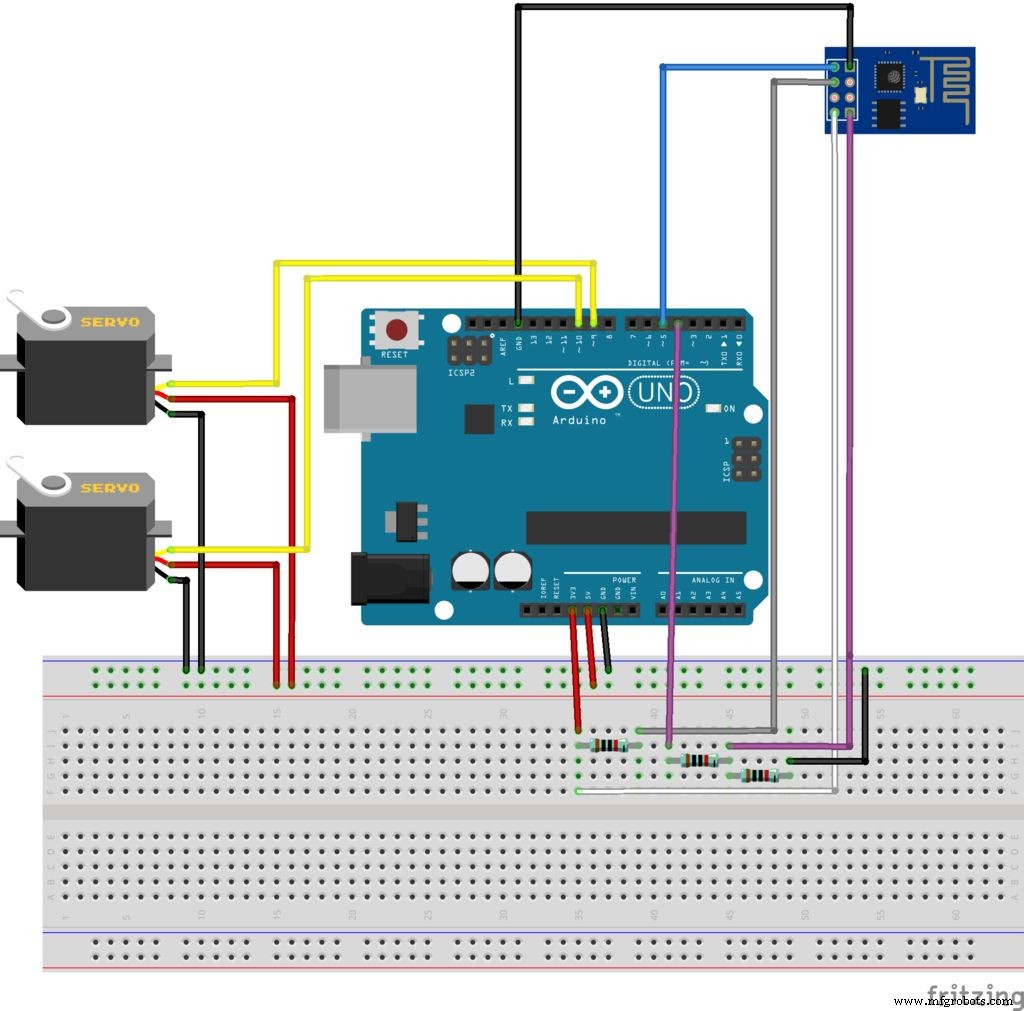
回路図に従ってすべてのコンポーネントを接続します。 ESP-8266モジュールとサーボモーターを接続するには、ジャンパー線が必要です。プロトシールド(よりコンパクトな回路用)、通常のブレッドボードを使用するか、Arduinoシールドを独自に設計することができます。
USBケーブルをArduinoUnoボードに接続し、次の手順に進みます。
ステップ3:Arduinoコード
最新のArduinoIDEをインストールします。このプロジェクトでは、サーボの制御にservo.hライブラリを使用しました。コードのアップロード中にWi-FiモジュールとコンピューターのUSBポート間の競合を回避するために、 softserial ライブラリが使用されました。 ESP-8266モジュールとの通信に追加のライブラリは必要ありませんでした。 ESP8266のボーレートを確認し、コードで適切に設定してください。
一部のサーボモーターは、その位置が限界(0度および180度)に近づくと、ジッターを起こし、奇妙な音を立て始めます。これを回避するために、Arduinoコードと制御インターフェース(後で)の両方で角度を10〜170度に制限しました。
残念ながら、 servo.h ライブラリと softserial.h ライブラリはマイクロコントローラと同じタイマーを使用します。これにより、ArduinoがESP-8266と通信するたびにサーボにジッターが発生する可能性があります。これを回避するために、サーボは各コマンドの後にArduinoから切り離されます。モジュールを標準のシリアルピンに接続することもできます。この場合、各アップロードの前にモジュールを切断することを忘れないでください。
Arduinoコードをダウンロードします( wi-servo.ino )XXXXXをWi-FiルーターのSSIDに、YYYYYをルーターのパスワードに置き換えます。 ArduinoボードをコンピューターのUSBポートに接続し、コードをアップロードします。
ステップ4:インターフェース <図>
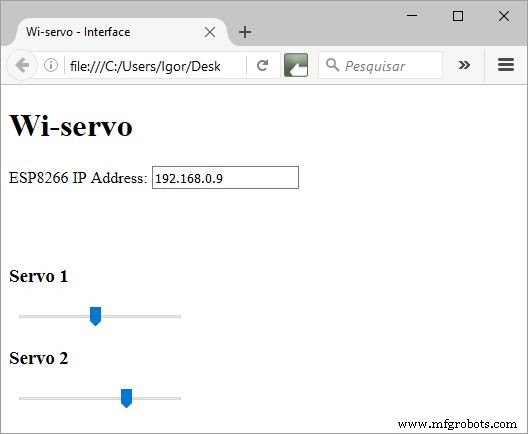
HTMLインターフェースは、サーボモーターの制御用に設計されました。この例では、2つのサーボが使用されましたが、Arduino Unoにさらに追加することができます(最大4つのモーターをテストしました)。
テキストボックスフォームは、ESPモジュールのIPアドレスを入力するために使用されます。 Wi-servo.html をダウンロード および jquery.js ファイルを作成し、両方を同じフォルダに保存します。
ステップ5:使用法 <図>
 <図>
<図> 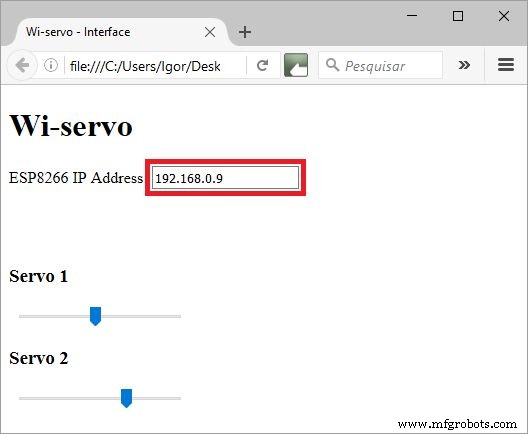 <図>
<図> 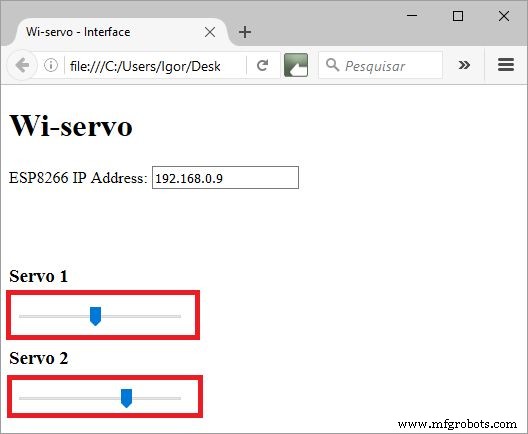
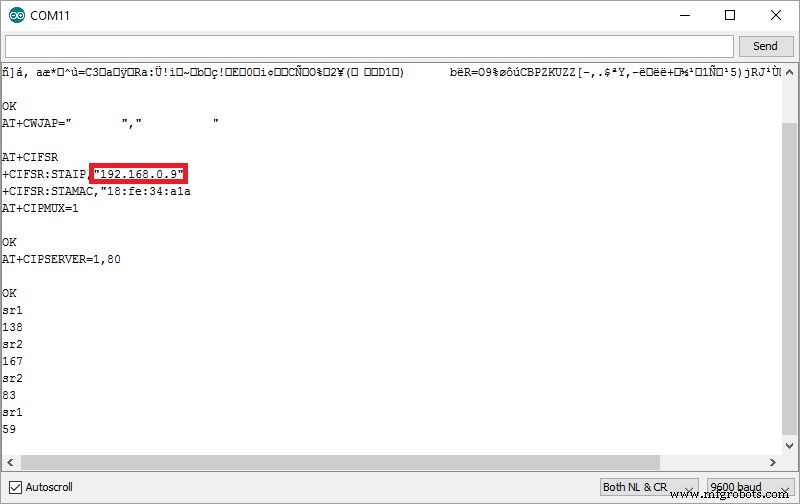
Arduinoを再起動すると、Wi-Fiネットワークに自動的に接続しようとします。シリアルモニターを使用して、接続が成功したかどうかを確認し、ルーターによってESP-8266に割り当てられたIPを取得します。
インターネットブラウザ(Firefox)でhtmlファイルを開きます。
テキストボックスでESP-8266のIPアドレスを通知すると、準備が整います。スライダーを使用して、各サーボに必要な角度を選択します。マウスボタンを離すと、ブラウザは自動的にArduinoにリクエストを送信し、各サーボを移動します。
コード
Github
https://github.com/ferauche/RoboAlegriahttps://github.com/ferauche/RoboAlegria 回路図
製造プロセス