


FizViz-統計のための大規模な物理的視覚化!
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
必要なツールとマシン
| ||||
| ||||
| ||||
| ||||
|
このプロジェクトについて
「FizViz」とは何ですか?
私たちは、情報を大判で、非常にクールで、すぐに読める方法で提示するデータの物理的視覚化を行っています。コンセプトは、オフィス、ワークショップ、または重要なデータを監視および共有したい場所に一連のFizVizウィジェットを配置することです。
-今日は何個の商品を販売しましたか?それは私の平均と比べてどうですか?
-何人の人が私のウェブサイトにアクセスしましたか?彼らは何ページを見ましたか?
-最近の猫の動画投稿のせいでトラフィックが増えているのでしょうか、それとも私の製品とは関係がないためにみんながバウンドしているのでしょうか?
または、他のデータソースに接続します:
-3Dプリントの仕事の残り時間はどれくらいですか?
-ここには何人いますか?
-ハックスター世界最大のArduinoチャレンジには、すでにいくつのチャレンジエントリが提出されていますか?
なぜFizVizを作ったのですか?
昨年、私たちのチームは最初の「本物の」製品を作成して発売しました。私たちは、設計、調整、クラウドファンディング、構築、再設計、認定、笑い、叫び、誓い、そして最終的には製品を出荷しました。私たちが思っていたよりもずっと難しいです(しかし、それは誰もが言うことです)。
それから...私たちは執拗なメトリクスの監視を始めました。何人の人が私たちの製品ページを訪れましたか?当店?彼らはどのくらい滞在しましたか?彼らはどうやってそこにたどり着いたのですか?ツイート、ブログ、投稿、共有するとどうなりますか?何もしていなかったのに、なぜ10ユニットを売ったのですか?
<図>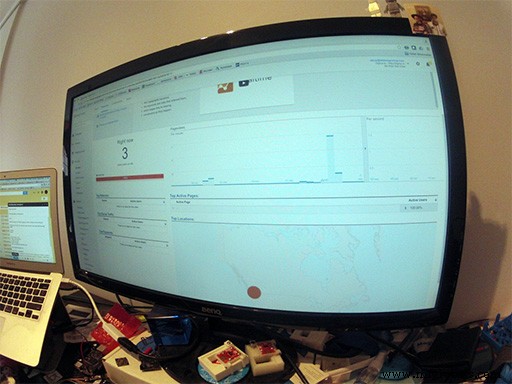
質問する心は知りたかった。
私たちは専任のチームですが、誰もがこれらの質問に答えようとしてGoogleAnalyticsを細心の注意を払って組み合わせることにアクセスしたり興味を持ったりしたわけではありません。そして、それを知った私たちの人々は、私たちが同じ主要な分析を、時には1日に何度も検索することになったことに気づきました。多くの場合、私たちが見たときはあまり変化しなかったか、見ていなかったときは大きく変化しました。
明らかに、あらゆる形や形式のデータをフィルタリング、要約、およびマッシュするためのオンラインツールとシステムに不足はありません。しかし、彼らはあなたをあなたの流れから遠ざけ、あなたが興味のあることに到達するためにワークフローの(やや難解な)知識を必要とします。
そして、率直に言って、彼らはそれほどエキサイティングではありません。
彼らはオフィスの周りの人々を応援させません。彼らはチームの成果を放送せず、成功を急いで見ています。彼らは不妊で、デジタルで、通常は孤独な経験です。
<図>
FizVizはどのように機能しますか?
FizVizウィジェットは3つのコンポーネントで構成されています:
1) WindowsPCまたはタブレット (Surfaceが大好きです)データを収集し、Windows RemoteArduinoを使用して現在の状態をFizVizウィジェットに送信します。
2) Arduino MKR1000 Wi-Fi経由でPCからデータを受信し、FizVizウィジェットの物理的なコントロールを駆動します。
3)データを表示する物理コンポーネント 。現在、次のサポートがあります:
- カラーLED効果用のNeoPixelライトストリップ
- ダイヤルとゲージを作成するためのステッピングモーター
- Gaguesをゼロ調整または調整するためのスイッチ(RotoMoto FizVizウィジェットでゼロを見つけるためにリードスイッチを使用します)
基本的に、PCは手間のかかる作業を行います。つまり、データソース(Google Analyticsを収集するためのソースが含まれています)からデータをプルしてから、物理的なインストールを駆動するArduinoに状態とコマンドを送信します。
ステッピングモーターを備えた基本的なNeoPixelウィジェットを稼働させるためのすべての回路図と情報を提供しました。その後、好きなだけクリエイティブになれます。
私たちのビジョンは、さまざまなタイプのデータに対してさまざまなウィジェットを構築し続けることです。 1つの例から始めましたが、FizVizは、実際には、表示するデータの種類に応じて適切な視覚化を行うことを目的としています。ルールはありません!
電気の概要
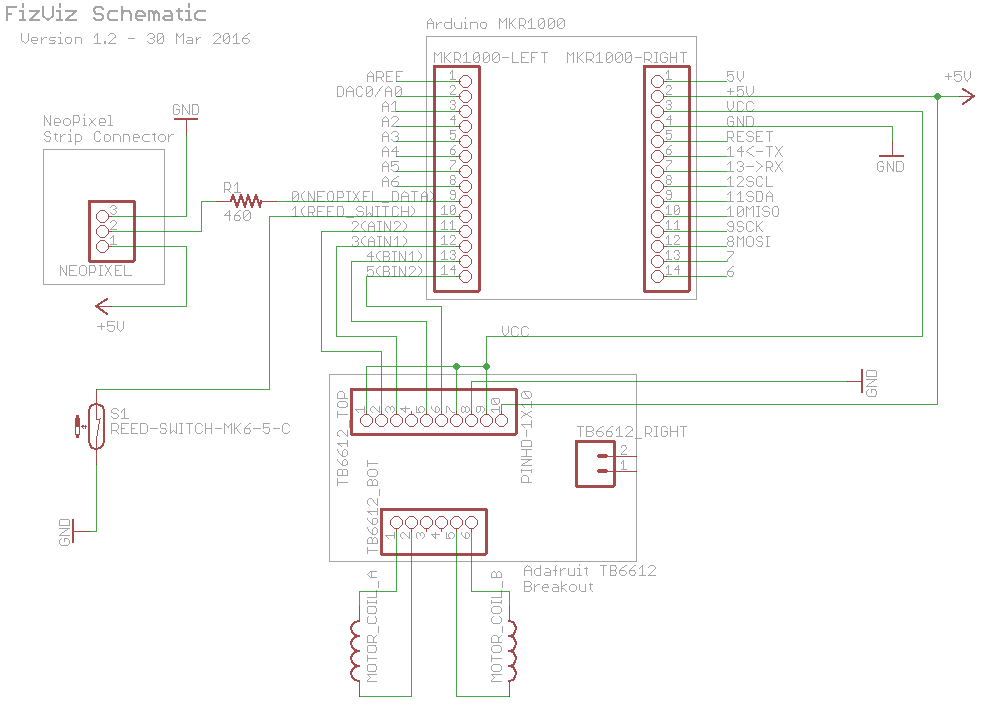
FizVizの配線はかなり簡単です。最新の回路図面は、GitHubのFizViz-Electricalリポジトリに常にあります。コンポーネントに関する注意事項は次のとおりです。
- Arduino MKR1000 -私たちの活動の頭脳。小さくてうまく機能することを除けば、ここで言うことはあまりありません!
- NeoPixel Strips -NeoPixelストリップへの接続は非常に簡単です-データピンとArduinoの間に460オームの抵抗(R1)を使用します。次に、通常、ストリップの電源装置をシステムのメインの5V電源装置に直接配線します。 AdafruitのNeoPixelUberguideは、NeoPixelsの統合に関しては聖書であり、プロジェクトで使用して制御を簡素化できるArduinoライブラリが含まれています。ストリップには2本のアース線(黒)が付いている場合があります。どちらもアースピンに接続されます。
- AdafruitTB6612ブレイクアウトボード -一般的なステッピングモーターを制御します。ダイヤル、ゲージ、スライダーなど、正確に動くものを作るのに本当にクールです。 RotoMotoFizVizの針を駆動するために使用しました。ここに追加するのはそれほど多くありません。 Adafruitの指示に従い、組み込みのArduinoStepperライブラリと互換性を持たせて制御しました。
- リードスイッチ-RotoMotoFizVizウィジェットは、針の磁石とリードスイッチを使用して、針がゼロになったことを検出します。ウィジェットの仕組みに応じて、マイクロコンタクトスイッチや圧力スイッチなどの別のスイッチをここでも使用できます。
電子機器をAdafruitPerma-Proto Half-size Breadboardに詰めてウィジェットに詰め込みましたが、フォームファクターによっては、別の形状が必要になる場合があります。これが私たちのように見えるものです:
<図>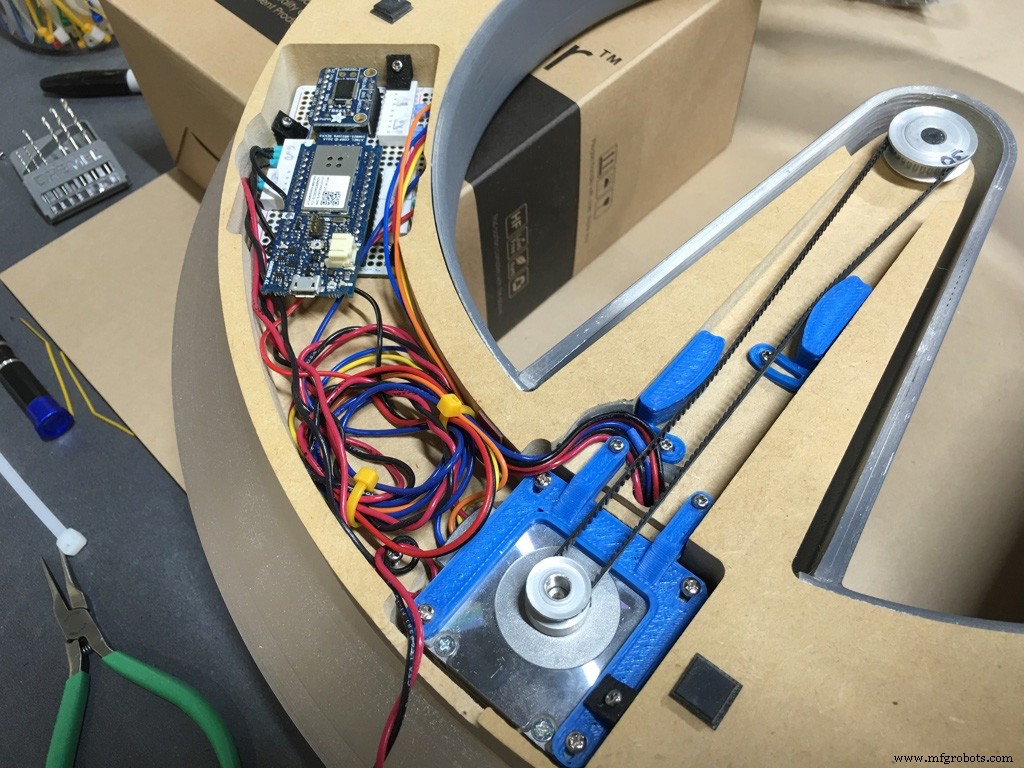
ファームウェア/ Arduinoコードの概要
GitHubのFizViz-Arduinoリポジトリには、FizVizウィジェットを強化するArduinoスケッチの最新かつ最高のバージョンが含まれています。プロジェクトを立ち上げて実行するために必要な詳細については、さらに多くの情報がありますが、ここにいくつかの重要なハイライトがあります:
- WiFi構成 -WiFi構成に関する注意事項に注意してください。よりエキゾチックなWiFiネットワークを使用している場合は、ここでもう少し深く掘り下げる必要があるかもしれません。
- 外部依存関係- 外部依存関係に関してはかなり軽いですが、インストールが必要になる可能性のあるいくつかのライブラリを参照しています。最新のライブラリは常にページの下部で参照されます。
Windows /リモートArduinoの概要
GitHub上のFizViz-Windowsリポジトリは、FizVizのWindowsコードのホームです。繰り返しになりますが、GitHubにはより具体的な情報がたくさんあるので、そこでの説明を詳しく読むことをお勧めします。
私たちの戦略は、ms-iotのリモートArduino配線コードから始めることでした。 Windowsアプリから直接ピンを制御する代わりに、いくつかのカスタムFirmata制御メッセージを設定しました。リモート配線コードに小さな変更を加えて、カスタムメッセージをFirmataレイヤーに渡すことができるようにしました。次に、Windowsアプリからの制御コマンドに基づいてFizVizの状態を更新するカスタムメッセージハンドラーをArduinoプロジェクトに実装しました。
また、Google Analyticsから分析データを収集するためのサポートも追加しました。これは、独自のFizVizウィジェットの主なユースケースであるためです。別のデータソースに接続する場合でも、これが参考になることを願っています。 APIアクセス用にGoogleAnalyticsアカウントを設定するには、いくつかの手順が必要です。詳細については、リポジトリのメモを確認してください。
<図>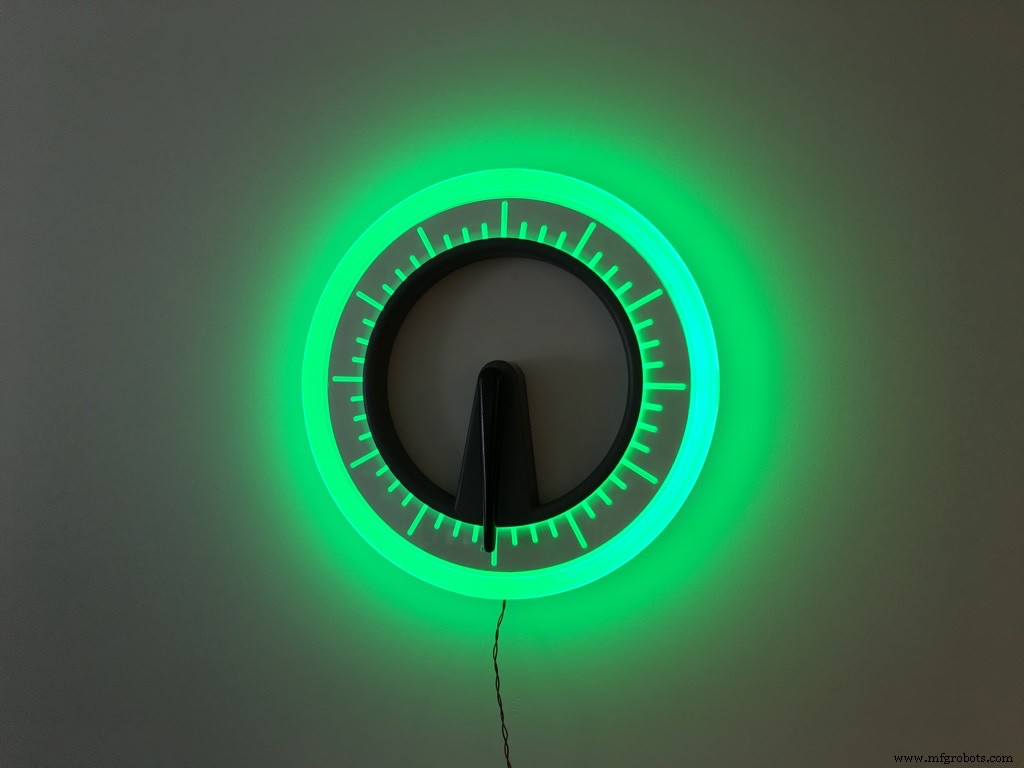
ウィジェット#1-「RotoMoto」
FizVizのすべての機能を紹介するためにRotoMotoを構築しました。それはあなたがどんなオフィスでもぶら下がることを誇りに思うことができるウィジェットで私たちの照明とステッパーコントロールの両方の非常にクールなアプリケーションを示すことによってプラットフォームを行使します。私たちの夢は、これらの美しさの4つまたは5つのスイートを並べて吊るすことですが、それを実現するには、さらに多くのMKR1000が必要になります!
独自のRotoMotoの構築は非常に簡単です。すべて同じツールを持っていなくても、手に入れることができるものなら何でも、私たちと同じ効果を達成する方法はたくさんあります。記事の残りの部分では、ビルドと、さまざまな効果のために微調整できる可能性のある場所について説明します。
CADリポジトリ
まず、CADファイルをFizViz-CADリポジトリのGithubに保存します。 RotoMotoウィジェットを作成するために作成したさまざまなパーツのSTEPバージョンとSTLバージョンがあります。
追加パーツ
CAD設計に加えて、アセンブリで使用した部品のリストは次のとおりです。
説明サプライヤー部品番号注記ステッピングプーリーMcMaster-Carr1375K1515歯ニードルプーリーMcMaster-Carr1375K2830歯ベアリングMcMaster-Carr60355K701使用2ベルトMcMaster-Carr7887K28ステッピングモーターネジDeModeElec。 54-410-1002.6mmx8mmリードスイッチDigikey306-1124-1-NDマグネットDigikey469-1002-ND 0.5 "Dx0.125" H マウントボード
RotoMotoビルドのバックボーンは取り付けボードです。基本的に、それは機械的および電気的コンポーネントを収容し、ディスプレイの点灯したベゼルの後ろにすべてをきれいに押し込めます。
ShopBot CNCを使用して、1インチの厚さのMDFボードから取り付けボードを削り出しました。形状を切り抜く方法は他にもあります(レーザーカッター、ジグソーパズルなど)が、CNCがここにあるので、それを使用しました。 。
<図>
ベゼル
これまでのところ、私たちのビルドの大きな特徴は、照らされたベゼルです。この部分を1/2 "の厚さのアクリルシートから切り取ります。これもShopBotで行います。照明技術の鍵は、表面が切り取られた「つや消し」の場所がどこでも照らされることです。Dremelまたは他の手でマーキングを作成できます。 -ツールも。
このように材料を使用する方が効率的であるため、CADモデルを半分にカットして提供しました。 2つのパーツをアクリルセメントで結合するか、1つのカットで行う場合はモデルをマージします(これがデモの作成方法です)。
<図>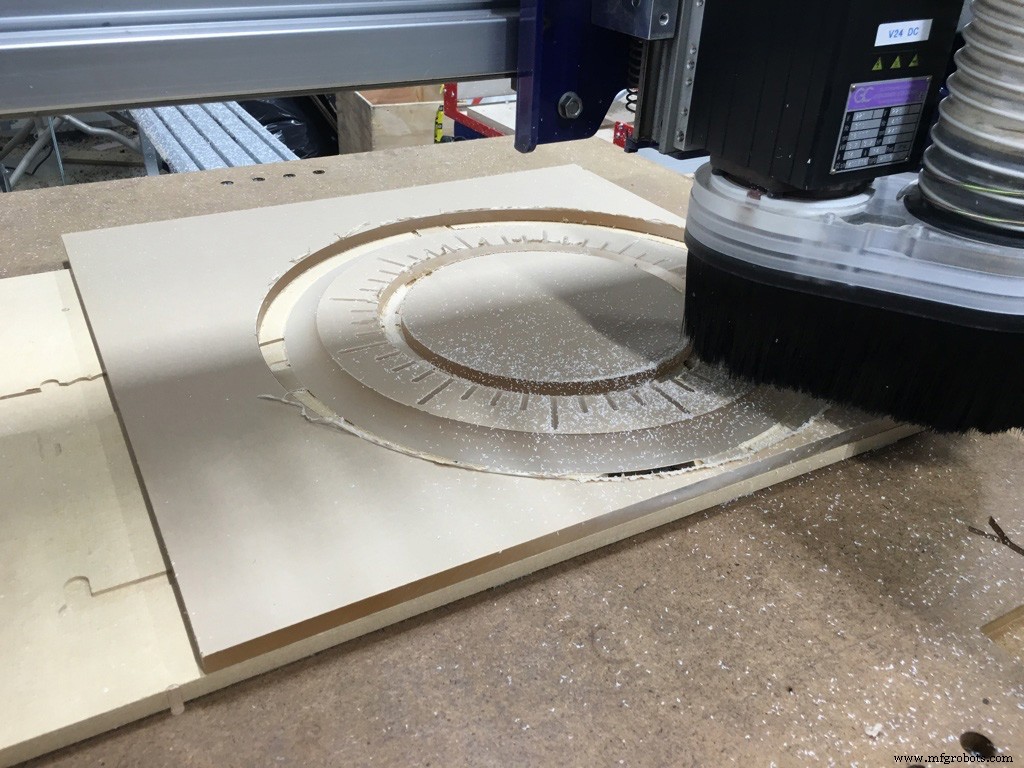
内輪
インナーリングは、ビルドの重要な部分です。これは、NeoPixelストリップが取り付けられ、アクリルベゼルの後ろに隠されている場所です。私たちの製作は、PLAからTAZ5に大きな塊で3D印刷し、それを接着することで構成されていました。かなりの量のフィラーとプライミングの後、かなりしっかりしたリングができました。
<図> <図>
<図> 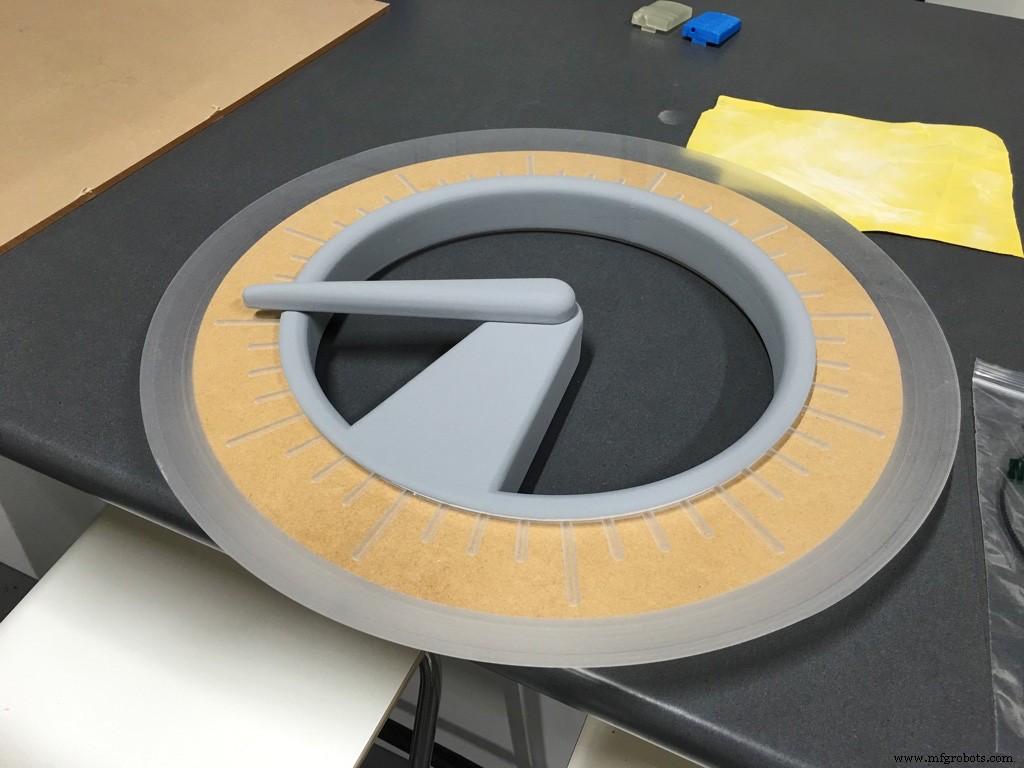
モーターと機械
CADリポジトリには、Sanyo Pancake Stepperのモーターマウント、ベルトテンショナー、シャフトのファイルが含まれています。取り付けはかなり簡単です。ベルトとプーリーは次のように取り付けられています。マウントに2つのベアリングを使用すると、剛性が高まり、シャフトがまっすぐに保たれます。
<図>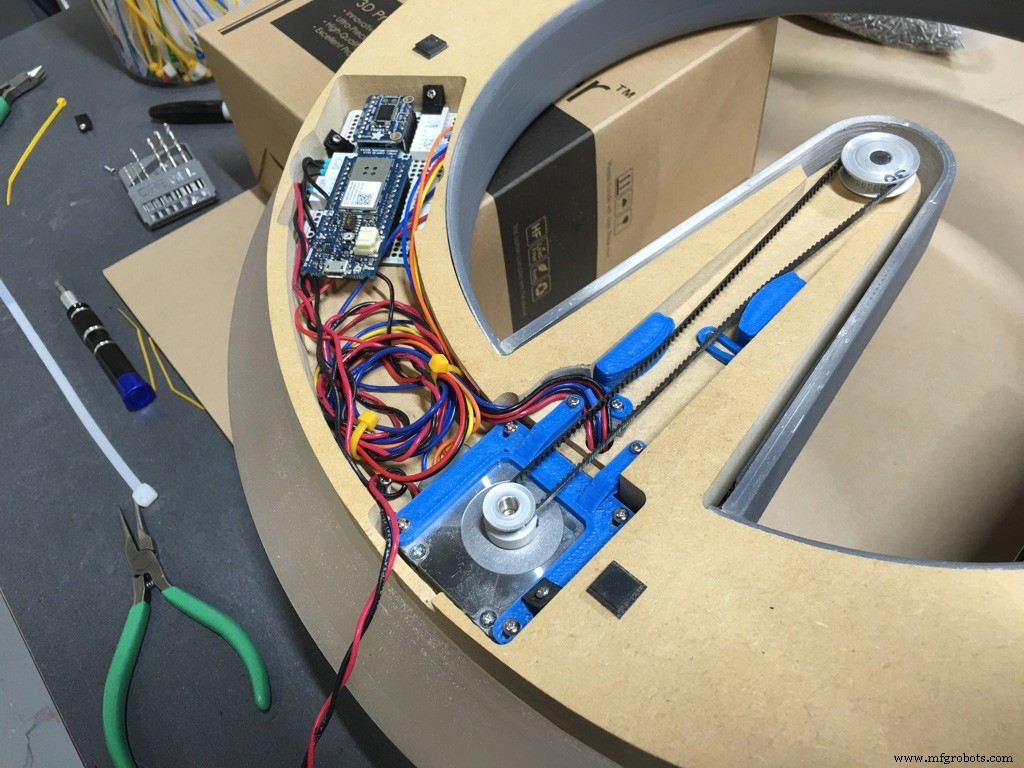
配線
すべてを合わせるのは少し注意が必要です。まず、NeoPixelストリップを内側のリングに接着またはテープで固定して、しっかりと固定します。次に、リードスイッチとNeoPixelsのワイヤーがマウント本体の穴を通過します。その後、内輪がベゼルを通ってマウントにスライドします。
写真は千の言葉の価値があります.....
<図> <図>
<図> 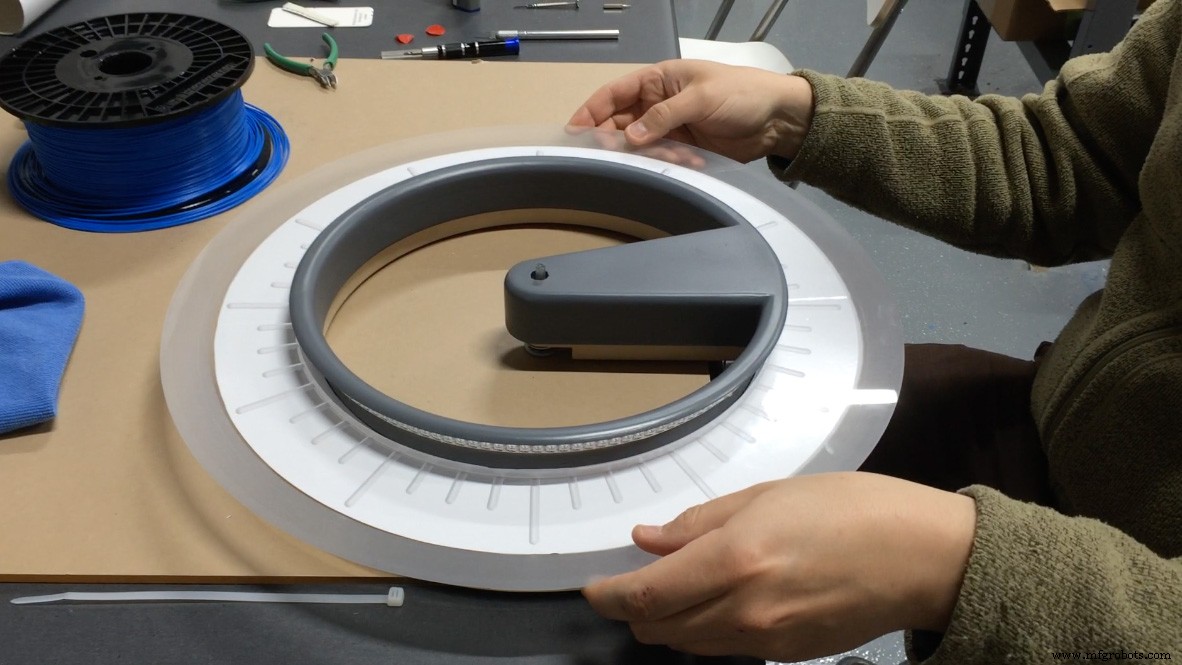
終了手順
ワイヤーを詰めてすべてを固定する最後のもの。ぴったりフィットしますが、すべてを詰め込みました。配線を終えたら、自分だけのRotoMotoが必要です!
<図>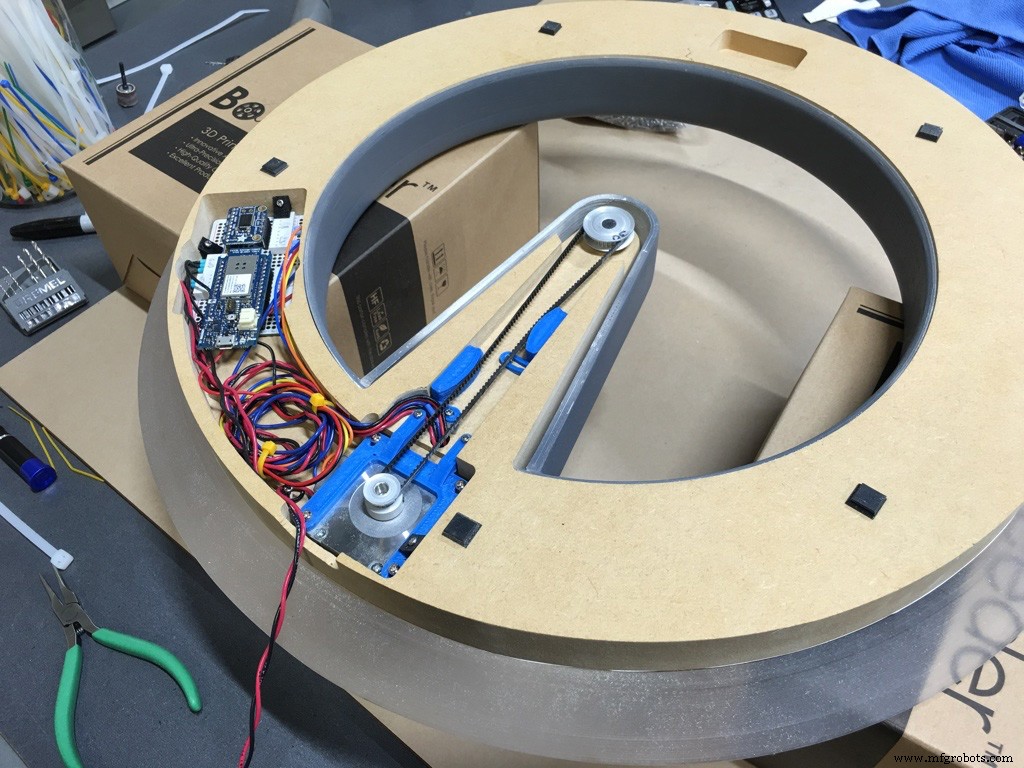 <図>
<図> 
コード
FizViz-ウィンドウズ
FizVizのWindowsソースコードを含むGitHubリポジトリhttps://github.com/iotdesignshop/FizViz-WindowsFizViz-Arduino
FizVizプラットフォームのArduinoソースを含むGitHubリポジトリ。https://github.com/iotdesignshop/FizViz-Arduino カスタムパーツとエンクロージャー
FizViz-CAD
FizVizウィジェットの最新のCADファイルを含むGitHubリポジトリhttps://github.com/iotdesignshop/FizViz-CAD 回路図
FizViz-電気リポジトリ
最新のFizViz電子設計のEAGLE回路図およびビットマップバージョンhttps://github.com/iotdesignshop/FizViz-Electrical.git製造プロセス