


ペットフードやボールなどを投げるための自動カタパルト!
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 10 | |||
 |
| × | 2 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
こんにちは、私の最初のプロジェクトへようこそ!
私たちの犬は彼女の食べ物が大好きです、彼女は文字通り数秒以内にすべてを食べるでしょう。食べ物が入ったボールから裏庭に投げるまで、これを遅くする方法を考案してきました。驚くべきことに、彼女は今や真空のようになっていて、食べ物を驚くほど速く見つけて食べることができます。それで、製図板に戻って、私は彼女がゆっくりと彼女の食べ物を楽しむのを助けるためにこの装置を思いついた:)
コンセプト <図>

2つのビデオを楽しむために数秒かかります、彼らはたくさん説明します。
しかし、言い換えれば、基本的な概念は、ローテーターサーボが回転してカタパルトアームを引き下げることです。リミットスイッチに触れるまでこれを行います。次に、トリガーサーボがホールド位置に移動し、カタパルトアームを押し下げます。その後、ローテーターサーボは元の位置に巻き戻され、次のスローの準備が整います。
フードデリバリーサーボはパイプを回転させ、カタパルトアームコンテナ/ヘッドにいくつかのフード(または他のもの)を送ります。次に、トリガーサーボが回転し、スプリングがカタパルトアームを引き戻して、餌を投げます。
テストでは、このセットアップと10メートルを超えるドッグフードビスケットを、フードローリングでカタパルトしました。サーボの調整とスプリングの変更により、これは完全に変更されます。
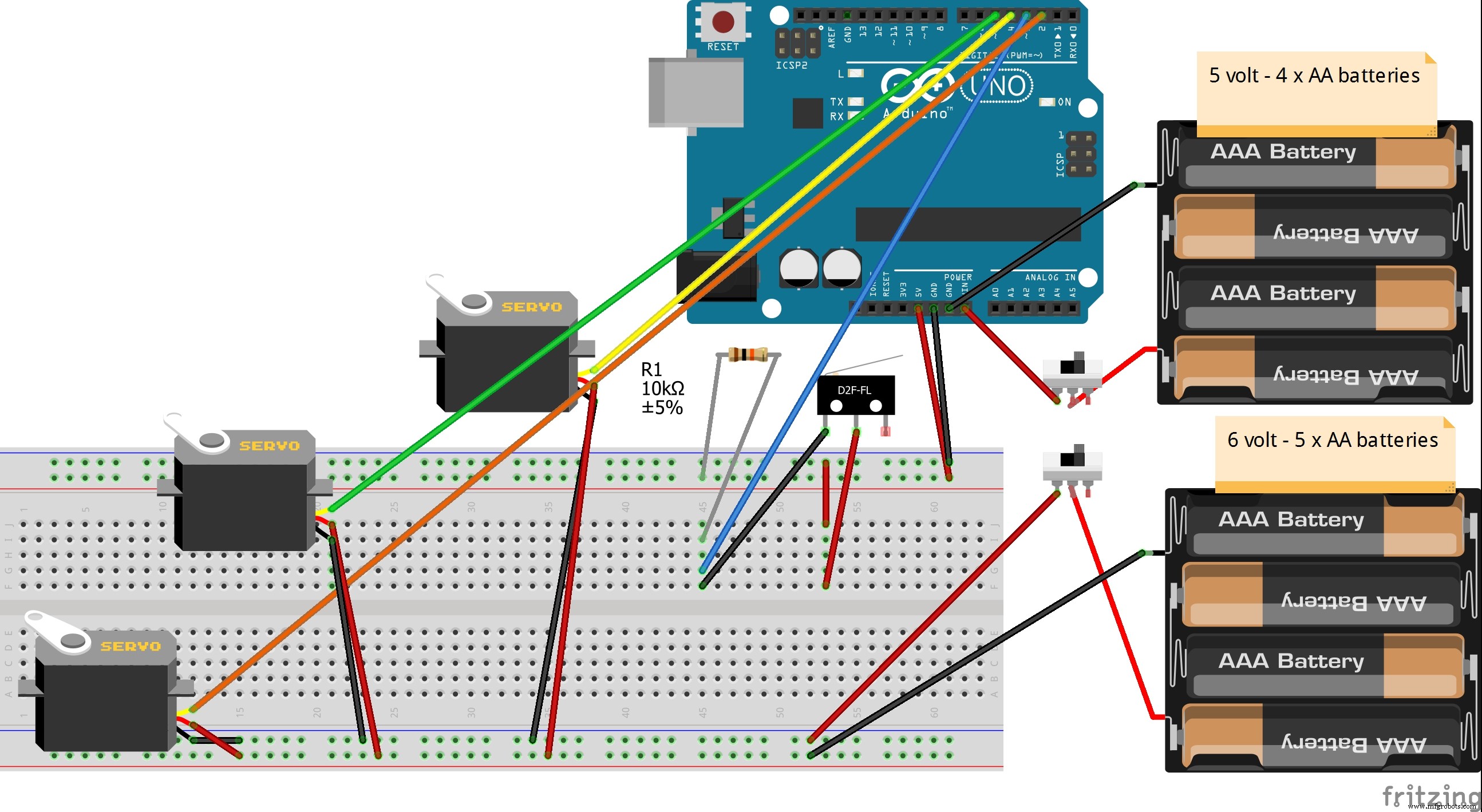
エレクトロニクス <図>
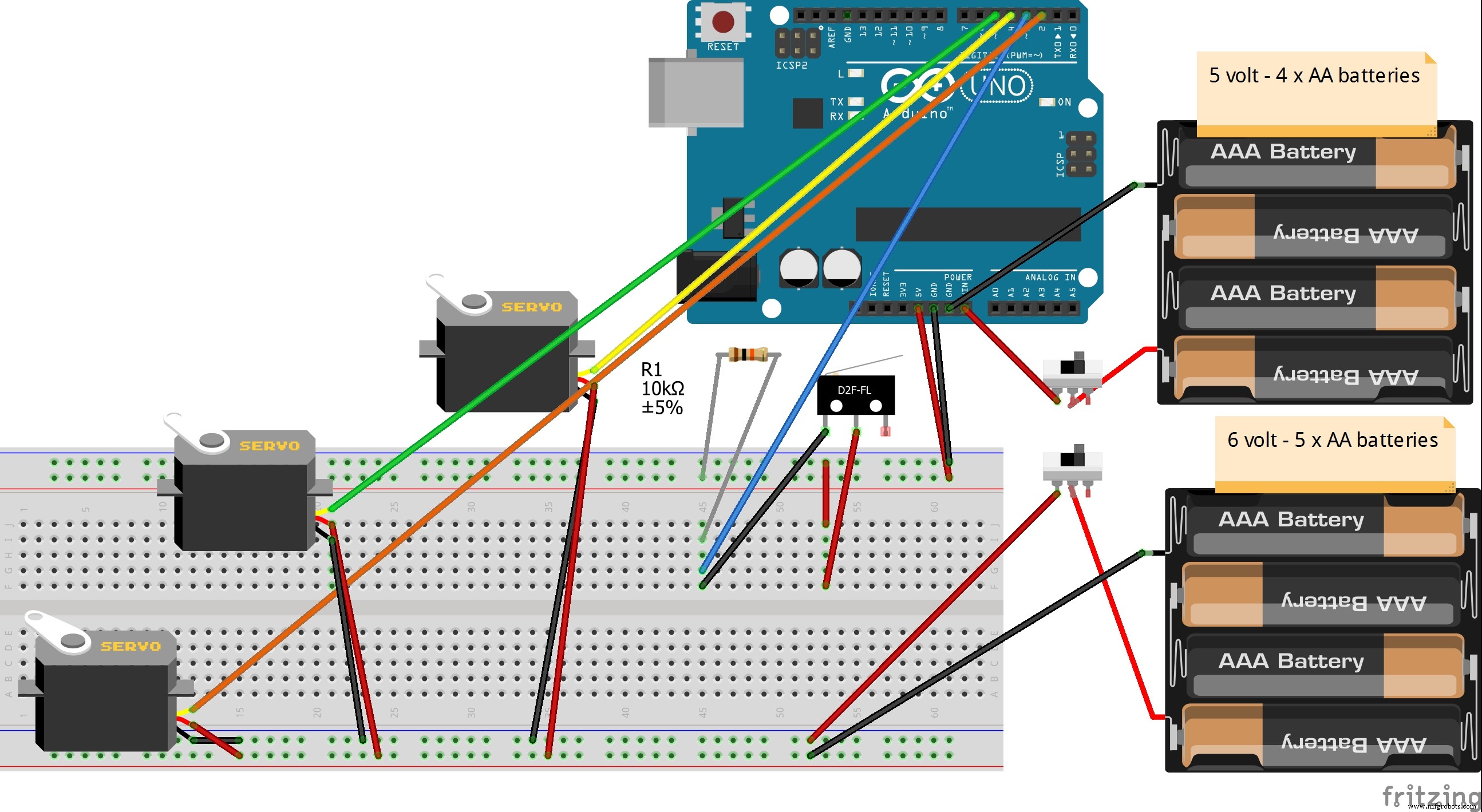 <図>
<図> 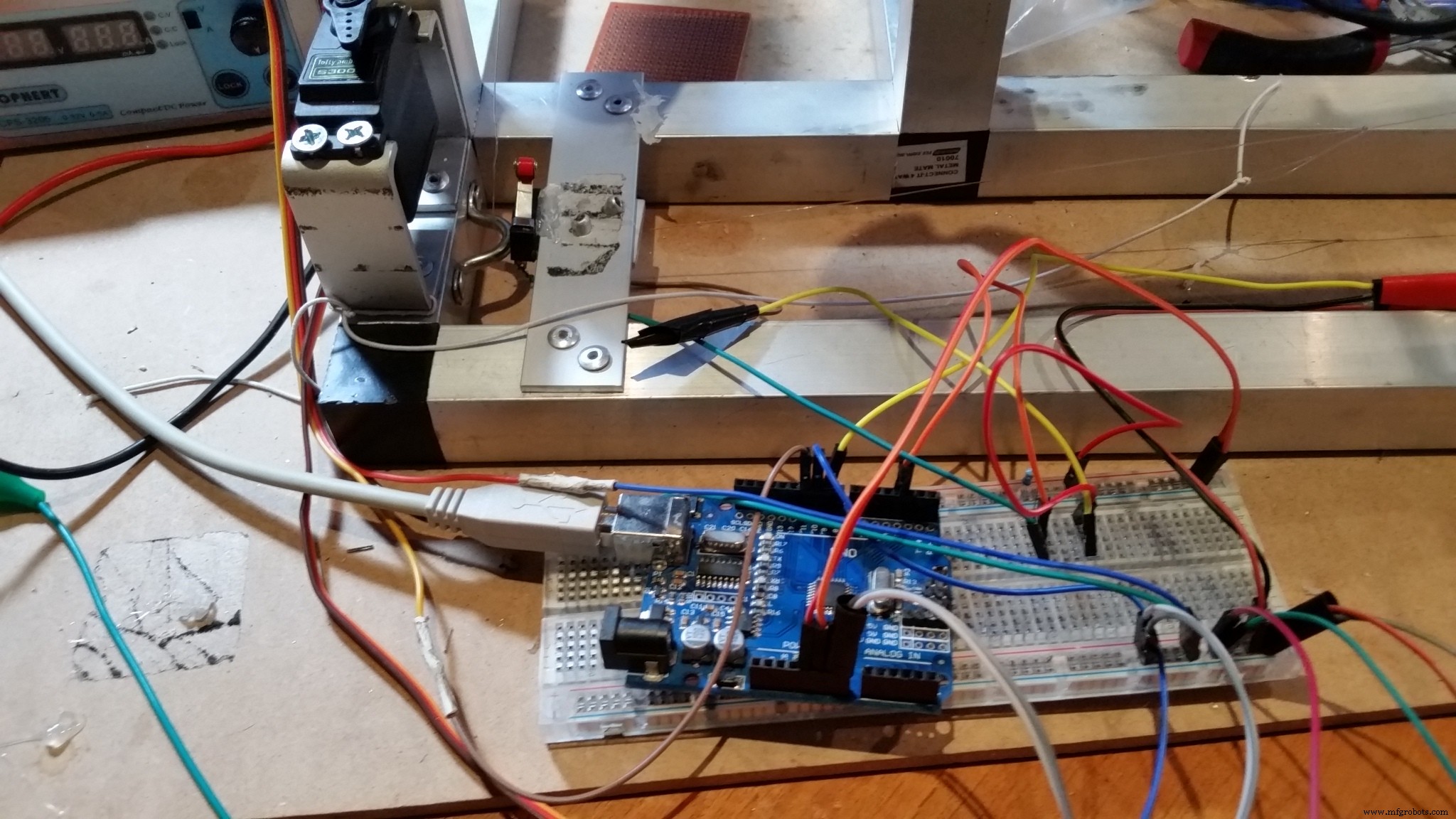
単純にするためだけでなく、このカタパルトは100の異なる方法で作成できるため、このプロジェクト全体で簡潔にしようと思います。スケーリングが可能で、さまざまな構造を作成し、さまざまな材料を使用できます。電子機器とサーボに加えて、残りはあなたが手元にあるもの、またはあなたの予算に完全に柔軟です。
電子機器の作り方を段階的に説明することはしませんが、それには印象的なプロジェクトがたくさんあります。特に私は初心者なので、間違いを犯した可能性があります。専門家から学ぶ方がよいでしょう;)
資料
- ArduinoUnoR3-どんなArduinoでもその仕事をします
- 2 x180度サーボ
- 1x連続回転サーボ
- リミットスイッチ
- 10kオーム抵抗
- 単三電池4本とケース
- 1 x 6ボルトのランタンバッテリー-一緒に配線された5x AAバッテリーと交換できます(そして私は交換します)
- 2 xスイッチ-どんな種類でもかまいませんが、最も単純なものでもかまいません
- 接続ケーブル-これらはたくさんあります;)
- ブレッドボード-テスト用
マテリアル-パーマネントを作成する場合
パフォーマンスボード2x 2ピンコネクタ-オプションで、バッテリーエンクロージャを配線することができます。
SERVOS
私はeBayから安いLoftyAmbition S3003180度サーボをいくつか購入しました。あなたは少なくともこのうなり声の何かが欲しいでしょう、彼らが荷物を受け取ることができないので、より少なく買おうとしないでください。ただし、Jaycar(オーストラリアの電器店)などの高価なものである必要はありません。私が使用した連続回転サーボはFS5106Rです。モデルは重要ではありませんが、少なくともこれらの仕様を備えたサーボが必ず必要になります。
カタパルトを強くしたり大きくしたりする場合は、それに合わせてサーボを大きくするようにしてください。
構造
<図> <図>
<図> 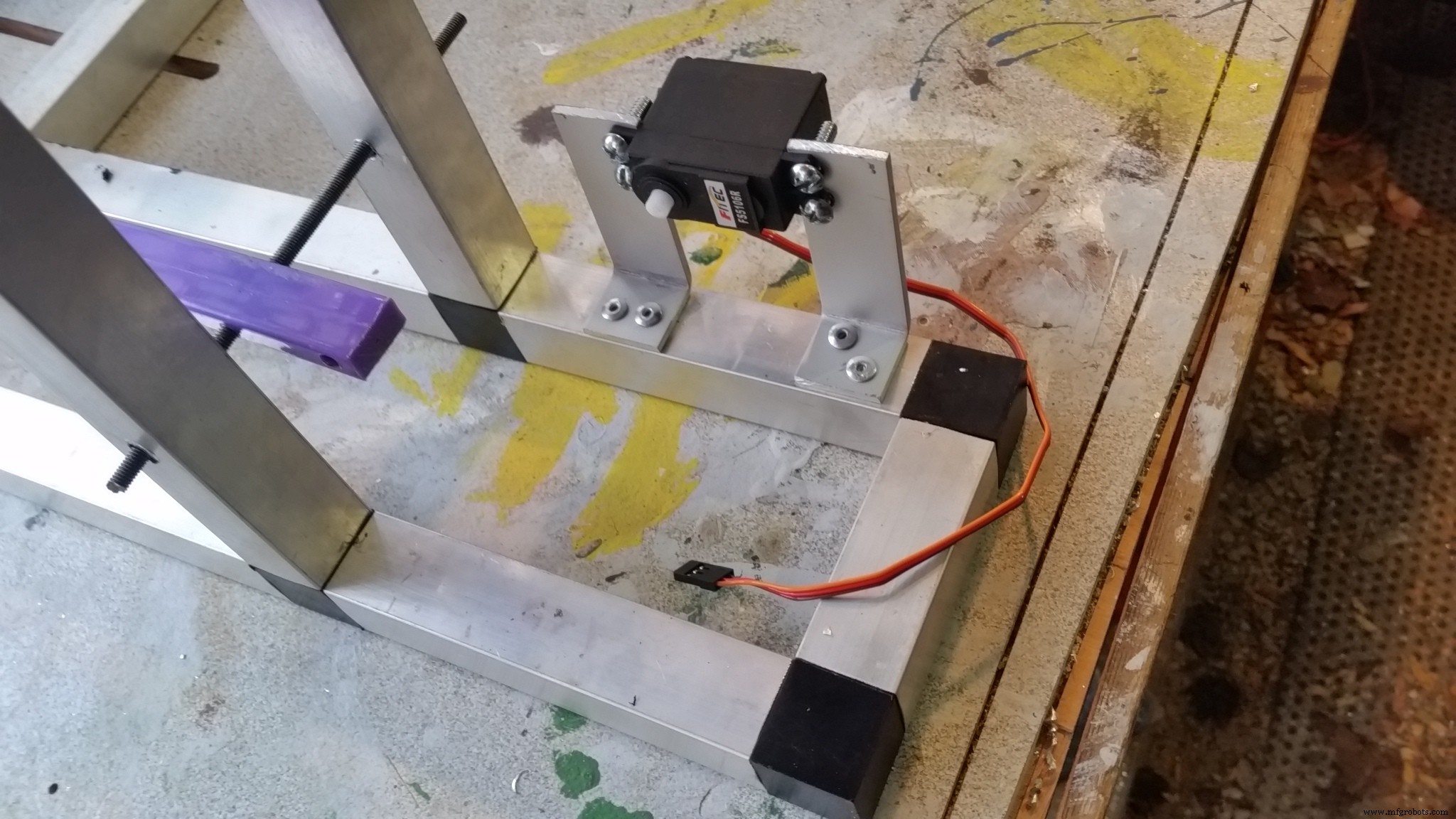 <図>
<図>  <図>
<図>  <図>
<図> 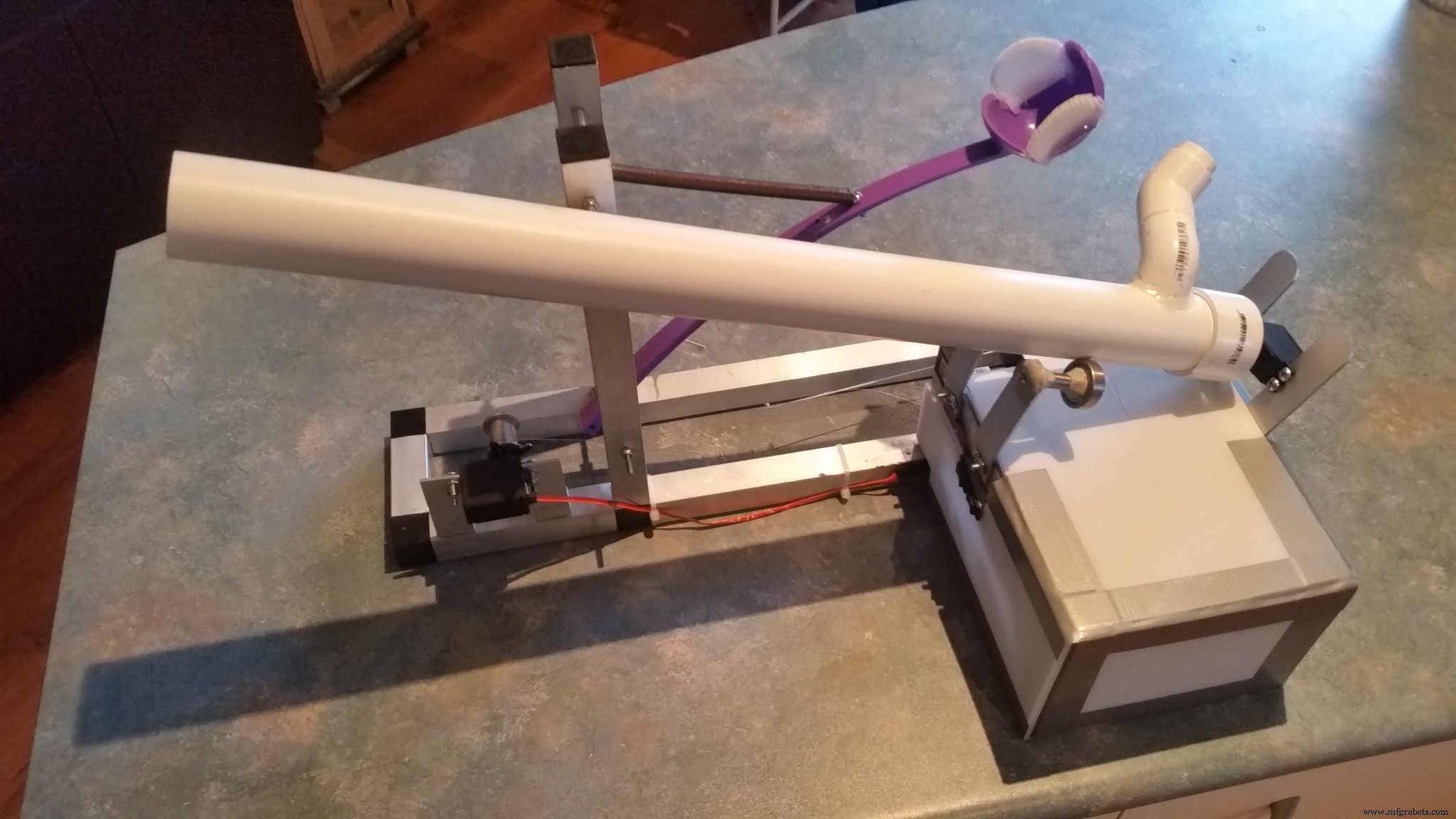 <図>
<図> 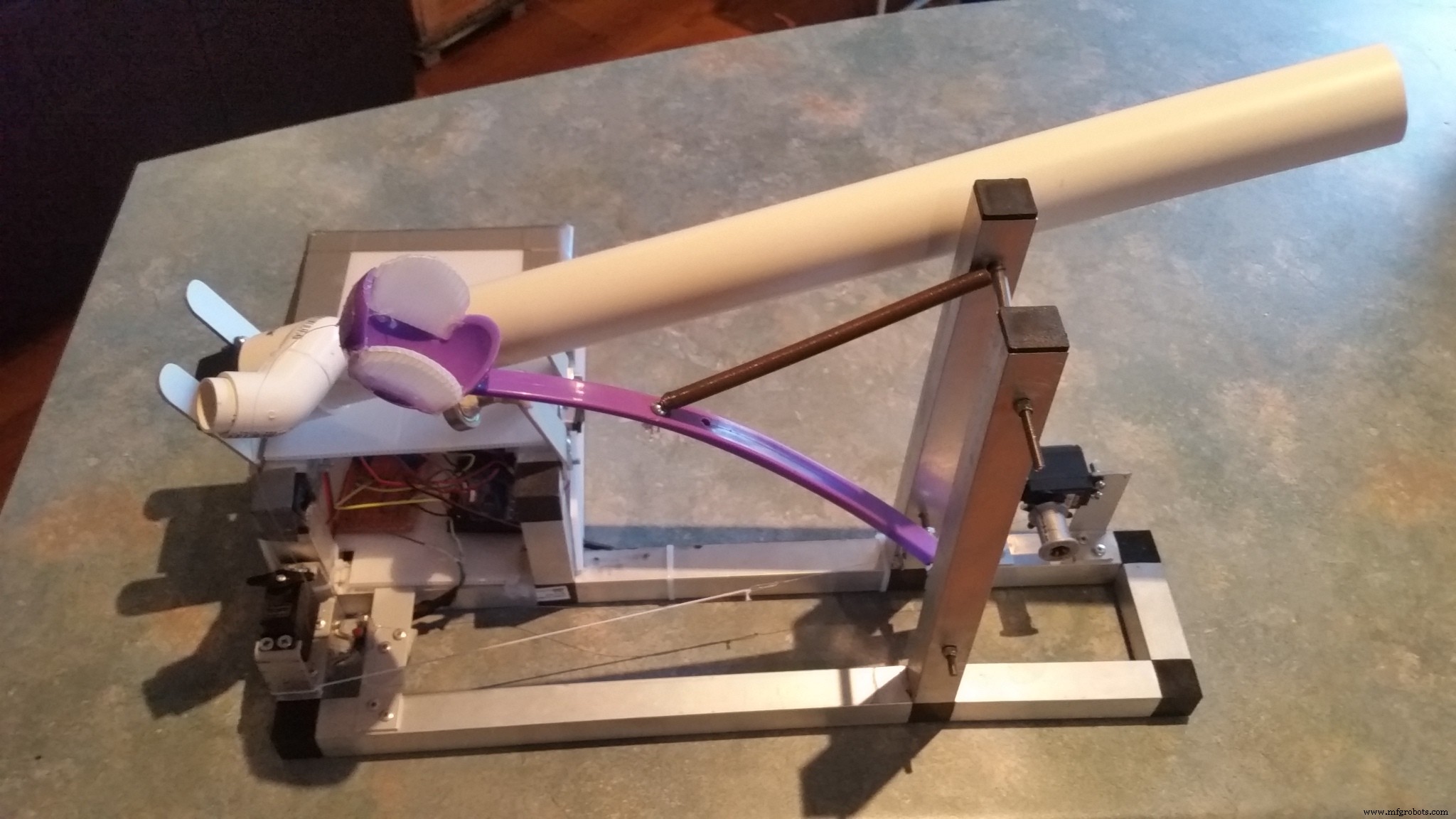
前に述べたように、構造は完全にあなた次第です。あなたはそれをプラスチック、木または金属から作ることができます。サイズもあなた次第です。より多くの食べ物(または他のもの)をカタパルトできるようにしたい場合は、それを小さくしたり大きくしたりします。したがって、これらの点のために、私がどのように構造を作成したかについては完全には詳しく説明しません。何かについてお答えできることをとてもうれしく思います。
私は再利用/リサイクル/アップサイクルなどの大ファンです。私が使ったものの多くは、小屋にありました。私は別のプロジェクトのために持っていたアルミニウムで私の構造のほとんどを作りました。主な構造は、25mmの正方形のアルミニウムチューブと「connect-it」プラスチックコネクタです。私が25mm幅x3mmアルミニウムで作ったモーターのブラケット。
フードデリバリーのコンセプトはこのプロジェクトからのものでした:
https://www.hackster.io/circuito-io-team/iot-pet-feeder-10a4f3 by https://www.hackster.io/circuito-io-team-彼らに大いに感謝します!
>私が作ったホルダーは、地元の金物店の40mmPVCパイプでできています。実際のアームは2つの小さな45度コネクタで、互いに接続され、大きなパイプに熱接着されています。大きい方のPVCチューブには、ペットフードビスケット(またはその他のもの)を簡単に追加できるように、別の45度のコネクタがあります。変更を加えるために、すべてを引き離すことができるように作られています。
フードデリバリーアームの残りの部分は、簡単に円を描くように設計されており、サーボを簡単に動かすことができます。これを作成するためのより良い方法がありますが(ツールがある場合)、私は最善を尽くしました。私はいくつかのブラケットを作り、いくつかの金属棒を切り取り、「それをこねる」と呼ばれる製品を使用して、棒をブラケットとベアリングに取り付けました。ビデオでわかるように、PVCパイプはベアリング上でスムーズに回転し、サーボから重量(および必要なトルク)の多くを取り除きます。
カタパルトアームは、2ドルの安い店のテニスボール投げです。
カタパルトパワーは、私のワークショップで見つけた古い春からのものです-さびからわかるように。カタパルトがどれだけ強く効果的に機能するかは、バネのサイズと種類、強度が非常に重要です。カタパルトアームのサーボ強度、スプリング強度、柔軟性のバランスをとる必要があります。このバランスをとるのは難しいことであり、実際には何を求めているかによって異なります。私は腕に動きを残すデザインを選びました。それは食べ物の行き先にいくらかの予測不可能性を生み出します。ビスケットを保持するカタパルトアームトップエンクロージャーも、予測不可能性を支援します。ペットが食べ物を見つけるのがもっと楽しくなります。
カタパルトアームは、釣り糸を介して小さな金属製のハンドル(またはフィーダー、用途によってはフィーダー)を介して、リミットスイッチを保持するプラットフォームの下で(詳細は2番目に)、構造の長さに沿って、別の金属製のハンドル(絡まないようにするため)を使用し、連続サーボに取り付けられているスピンドル(回転子のスピンドルに綿を保持するプラスチック製のものを使用)に取り付けます。さらに、釣り糸とトリガーブラケットに取り付けられた、薄くて弱い弾性体を使用しました。これにより、ローテーターが巻き戻されたときに釣り糸がどこにも巻き込まれないようになります。
私はこのトンネルコア-万能プラスチックシート-二重壁ユーティリティボードを使用して、バッテリーと電子機器のエンクロージャーを簡単に作成しました。
構造は非常に頑丈ですが、非常に軽いです。その中で最も重い部分はランタン電池で、まもなく単三充電式電池に交換されます。
学んだ教訓と将来の変更
あなたがマスターではないものと同様に、その過程で常に学ぶことがあります。このプロジェクトでは、最後まで私のリストに飽きてしまったとしましょう;)
最大の問題の1つは、食べ物の詰まりです。このフードデリバリーアームはプロジェクトから来ましたが、残念ながら私はそれを見つけることができないようです。それは散発的にビスケットを提供しませんが、これは良いことです、それはペットを推測し続けます!しかし、一般的には非常にうまく機能します。
私たちの犬は優しくないので、私はアルミニウムで構造を作りました、それでそれは彼女に耐える必要があります。幸いなことに、これまでのところ順調です。
カタパルトアームを改良して、少しセクシーに見せます。重要な要素のほとんどは、アクセスを許可するために分解できます。例えば食品配達、電子機器の筐体。
全体として、とても楽しいプロジェクトであり、私たちの犬はそれを愛しています!何かについての回答やアドバイスを提供できることをとてもうれしく思います。
自動カタパルトについて読んでくれたHacksterとあなたに感謝します。
コード
- 自動カタパルト-Arduinoコード
自動カタパルト-Arduinoコード Arduino
/ * * NathanKingによる自動ペットフードフリンガー2018年6月* /#includeint FoodDeliveryReleasePosition =115; int FoodDeliveryHoldPosition =0; int TriggerReleasePosition =90; int TriggerHoldPosition =0; int limit_switch =3; int switch_state =0;サーボフードデリバリー; //フードデリバリーarmServoトリガーを制御するサーボオブジェクトを作成します。 // triggerServoローテーターを制御するサーボオブジェクトを作成します。 // rotatorvoid setup(){rotator.attach(2);を制御するサーボオブジェクトを作成します//ローテーターサーボtrigger.attach(4);を接続します//トリガーサーボをアタッチしますfooddelivery.attach(5); //フードデリバリーサーボを取り付けますpinMode(limit_switch、INPUT); Serial.begin(9600);} void loop(){rotator.write(89); // Rotatorサーボの移動を停止します-適切なサーボがある場合は不要です;)delay(500); //開始位置fooddelivery.write(FoodDeliveryHoldPosition); delay(1000); trigger.write(TriggerHoldPosition); delay(1000); trigger.write(TriggerReleasePosition); delay(1000); //ローテーターサーボを停止するためのリミットスイッチループswitch_state =digitalRead(limit_switch); Serial.println(switch_state); while(switch_state ==HIGH){switch_state =digitalRead(limit_switch); Serial.println( "スイッチがオフです"); rotater.write(75); // Rotatorを時計回りにxx速度(0-255)で開始します} Serial.println( "Switch is on"); rotater.write(89); //ローテーターサーボを停止します//カタパルトアームをトリガーに保持し、ローテーターを開始位置にリセットしますtrigger.write(TriggerHoldPosition); delay(1000); rotater.write(110); delay(4500); rotater.write(89); delay(2000); //カタパルトへのフードデリバリーfooddelivery.write(FoodDeliveryReleasePosition); delay(500); fooddelivery.write(FoodDeliveryReleasePosition); //食べ物が落ちるのを待つdelay(1000); fooddelivery.write(FoodDeliveryHoldPosition); delay(150); //これは、フードデリバリーとトリガーリリースrotator.write(89);の間に遅延を追加するためのものです。 delay(1000); //カタパルトを解放します!! trigger.write(TriggerReleasePosition); delay(3000); //ペットが食べ物を見つけるのを遅らせる-これを編集して、食べ物が配達される速度を変更します:)}
回路図
製造プロセス
- ペットフード
- 食品および加工産業向けの衛生設計
- 食品および飲料アプリケーション用のコントローラー、レコーダー選択のヒント
- 低排出ガスキャリアに基づく自動車用およびその他用のアセタールカラーマスターバッチ
- B&Rは、自律型農業および建設車両用の「ハイエンド」コンピューターを発表します
- チタンをCNC加工するためのヒント:航空宇宙など
- スイスおよび生産ターニング用の自動スライディングヘッドストック
- 金属潤滑剤を塗布するためのヒント:過度のグリース補給などの回避
- インバー:2021年以降のスマートウェアハウジングのトレンド
- 自動食品自動販売機 – 製品の多様性
- あなたの家のための自動ブースターポンプを選ぶ時期と方法を知る