


醜いバグ
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
背景
これは、適切なツールと部品を使用して約30分で構築および組み立てることができる迅速で簡単な小さなロボットです。
私はそれを発明しませんでした。 YouTubeでこのような動画を見て、「ねえ、楽しそうだね、作ってみよう」と思った。
それで、ジャンクボックスからいくつかのサーボを取り出しました。古い携帯電話のバッテリーは、それを使って何かクールなものを見つけることを期待して保管していました。ArduinoPro3.3vは、割り当てに達する必要があったため、気まぐれで購入しました。無料配達と仕事に行きました。
一時間かそこら後、ここにありました!
アセンブリ
基本的なアセンブリから始めましょう。
いずれかのサーボ(これがバックサーボになります)のワイヤーが出ている側の反対側にある取り付けアームを切り取ります。後ろのサーボは下を向き、もう一方は前を向いています。接着剤またはケーブルタイを使用して、それらをまとめることができます。
<図>
次に、赤と黒のワイヤーを携帯電話のバッテリーのプラスとマイナスに引っ掛けます(電気技師のテープで固定しました)。リチウムイオン電池をお持ちの場合は、それに苦労する必要はありません:)
次に、ミニブレッドボードをバッテリーに接着しました。もちろん、そうする必要はありません。このロボットの部品を再利用する予定があるかどうかによって異なります。
バッテリーとブレッドボードをサーボコンパクションにケーブルで固定します。
<図>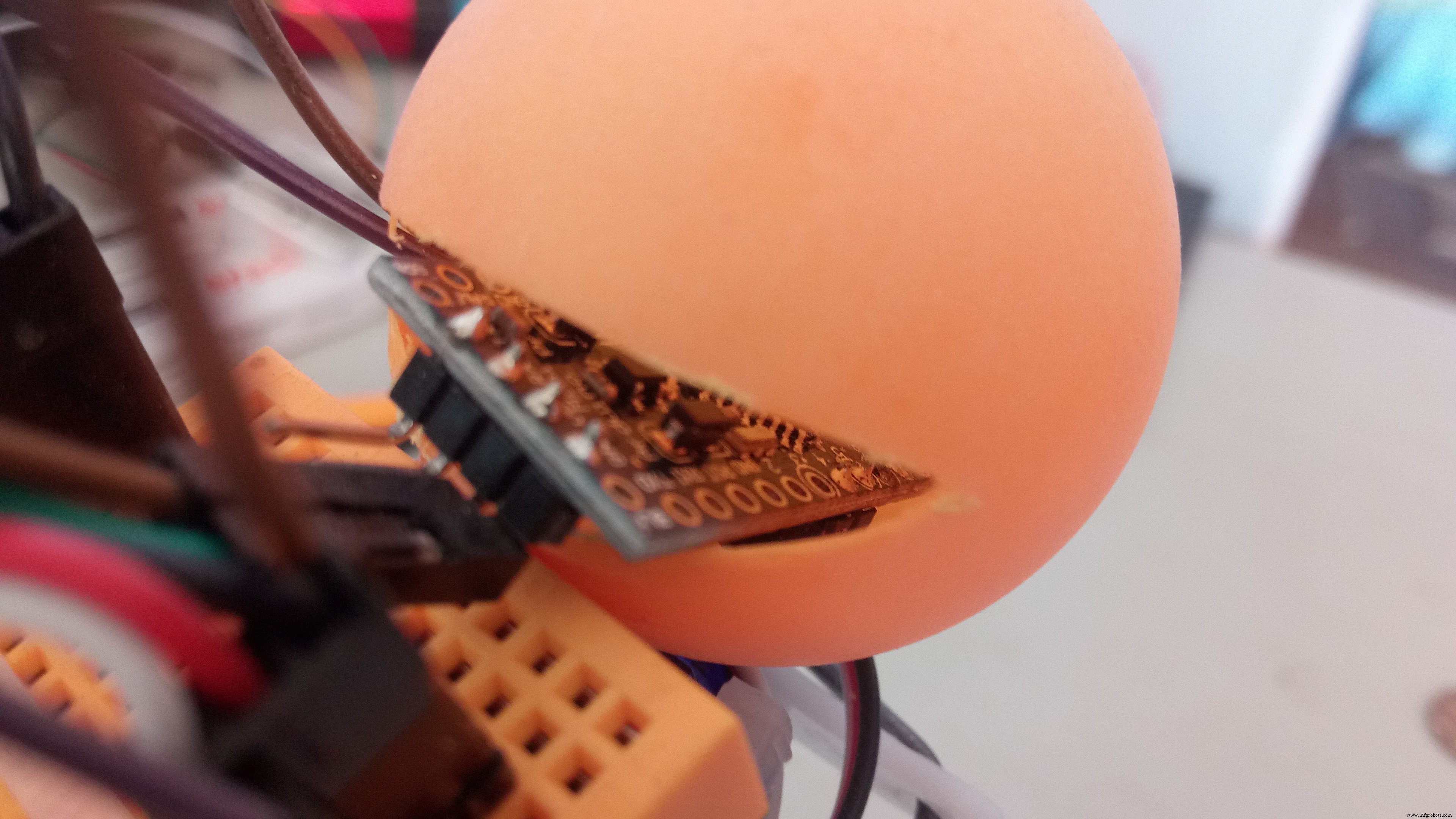
ピンポンボールにくさびを切ります。簡単そうですね。 :)それはおそらくこのチュートリアル全体の中で最も難しいステップです!ピンポン球は非常にしっかりしていて、丸いです。丸みを帯びたものを切るには忍耐が必要です。そして着用 ゴーグル !!!どのデバイスを使用してカットするかは関係ありません。プラスチック(または私のものが作られた奇妙な材料)はたくさん破片します。つまり、ゴーグル !カットが終わった後も、このチュートリアルの残りの部分を読めるようにしてほしいです。
Arduinoが穴にうまく収まっていることを確認してください。次に、ピンポンボールを動物の残りの部分に接着します。
足については、私はあなたをあなた自身の装置に任せます。鉱山は、サーボの翼取り付け部とその周囲に1mmの太さの鋼線を曲げた単純な部品でした(写真のように)。各脚の端に、グリップ用の接着剤ガンスティックから切り取った小さな足を置きました。
>ライターでワイヤーを温め、その場しのぎの足に植えるだけです。接着剤は接触すると溶けて、再び固まります。
モンスターの残りの部分に脚を取り付ける前に、回路を実行してスケッチをボードにロードする必要があります。 Arduino Pro Miniにスケッチをアップロードする方法がわからない場合は、これを読む必要があります。 https://www.arduino.cc/en/Guide/ArduinoProMini
<図>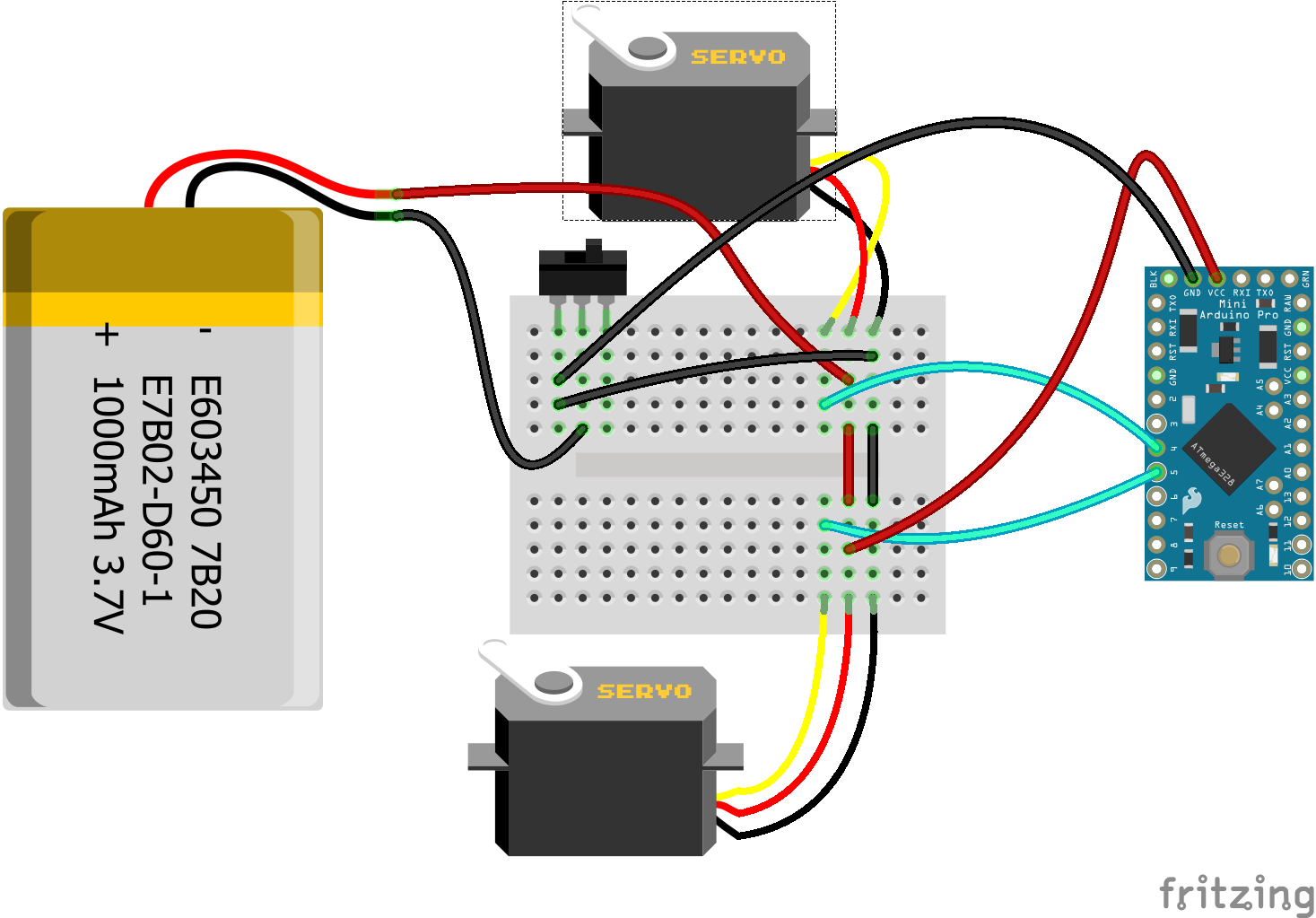
これのコードは非常に単純なので、ここでは説明しません。
セットアップの最後に5秒の遅延があるため、脚が動き始める前に、脚を中央に配置した後、Arduinoのプラグを抜く時間があります。
これで、足を配置して所定の位置にねじ込むことができます。
脚を所定の位置にねじ込んだら、プログラムを編集して、13行目の遅延を短縮(または削除)することもできます。
デモンストレーション
すべてがうまくいけば、次のように見えるかわいい小さな男がいるはずです:
そしてコメントでClaudioGaspのトリケラトプスビデオをチェックしてください!素晴らしいです!
コード
- バグ
バグ Arduino
#includeint FRONT =4; int BACK =5; Servo frontLegs、backLegs; void setup(){pinMode(13、OUTPUT); //これはかなり点滅しているfrontLegs.attach(FRONT);用です。 backLegs.attach(BACK); frontLegs.write(90); //サーボを中央に配置backLegs.write(90); //サーボ遅延を中央に配置します(5000); // 5秒待ちます(これにより、arduinoのプラグを抜く時間ができます//脚を固定できるようになります。} void loop(){digitalWrite(13、HIGH); // LED on delay(200); frontLegs.write(70 ); //前脚を少し動かすdelay(200); backLegs.write(70); //後脚を少し動かすdigitalWrite(13、LOW); // LEDオフdelay(200); frontLegs.write(110); //前脚を少し動かすdelay(200); backLegs.write(110); //後脚を少し動かす}
回路図
bug_Yr3jFYFuNQ.fzz 製造プロセス