


Arduinoを使用して自宅で大きな3Dプリンターを作成する方法
コンポーネントと消耗品
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 4 | ||||
| × | 8 | ||||
| × | 4 | ||||
| × | 4 | ||||
| × | 8 | ||||
| × | 2 | ||||
| × | 2 | ||||
| × | 2 | ||||
| × | 2 | ||||
| × | 3 | ||||
| × | 1 | ||||
| × | 4 | ||||
| × | 3 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 5 |
必要なツールとマシン
| ||||
|
アプリとオンラインサービス
>  |
| |||
| ||||
|
このプロジェクトについて
YouTubeビデオ
このプロジェクトのすべてについては、私のYouTubeビデオをご覧ください。
すでに26ページを添付しました PDF、 どちら 必要な数量の部品とその寸法が含まれています。 このWebサイトタブからダウンロードします:カスタムパーツとエンクロージャー。
_____________________________________________
注:
パーツを購入するためのすべてのリンクは非アフィリエイトリンクです
低価格の部品を入手できる場所で部品を購入できます
参考までに感謝します。
_____________________________________________
3Dプリンターを作成するのが難しい場合は、以下にコメントしてください。
必要な電気部品
- Arduino Mega 2560 x01番号
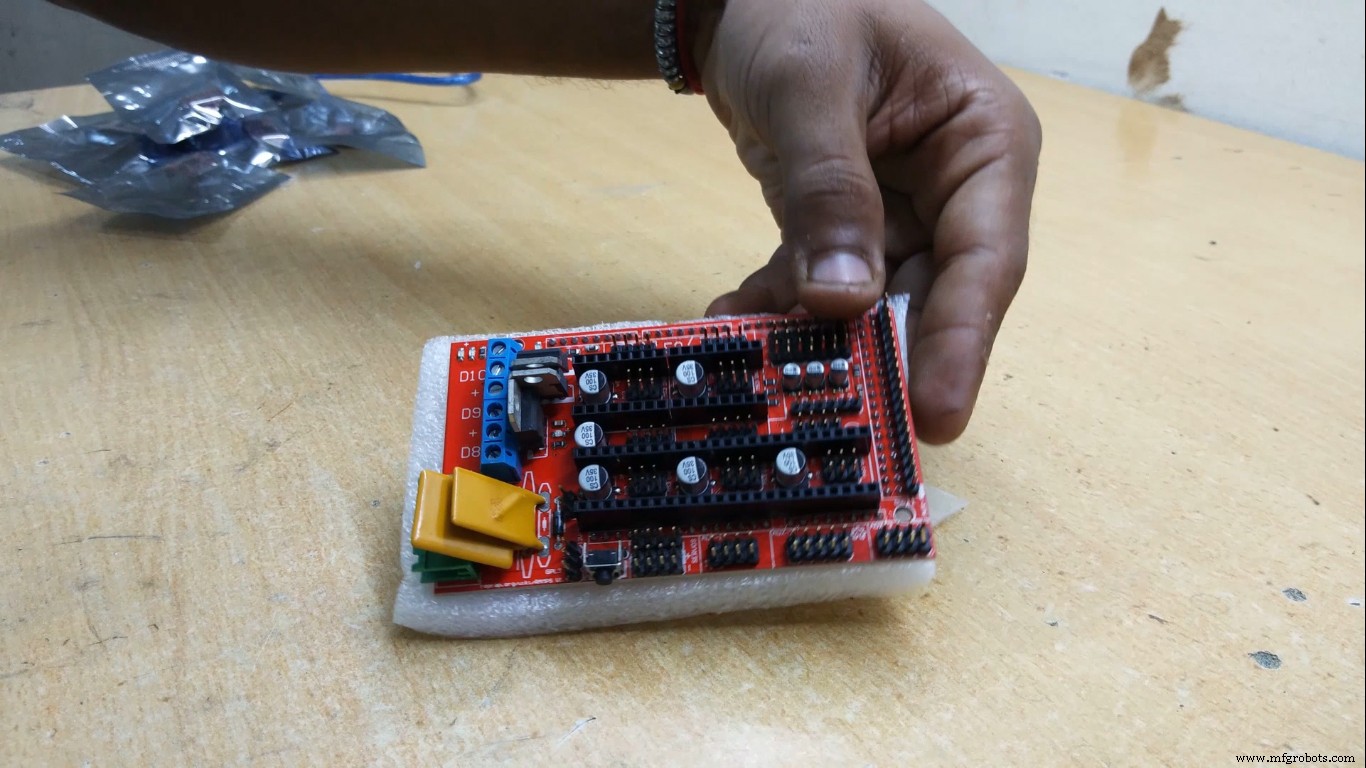
- ランプ1.4コントローラーボードx01番号
- 光学式エンドストップスイッチx03番号
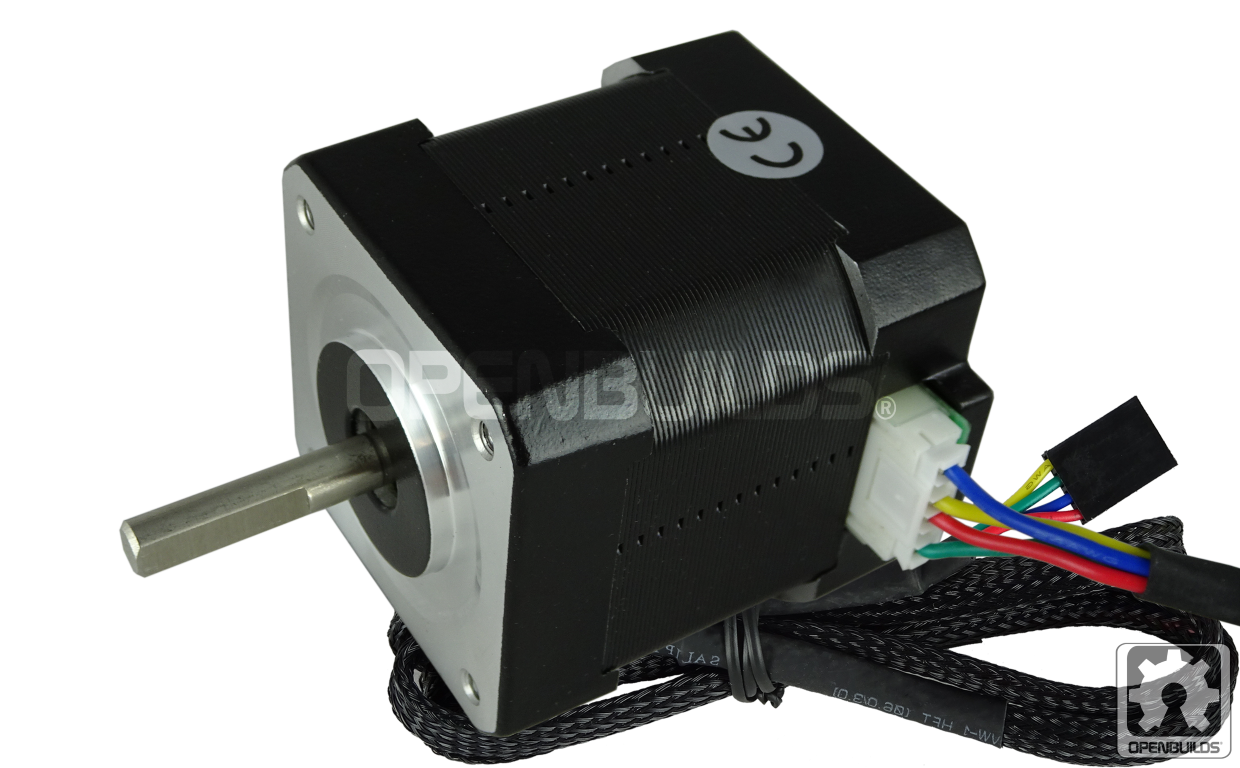
- NEMA17ステッピングモーターx05番号
- PCBヒートベッドx04番号
- E3Dv6ホットエンドx01番号
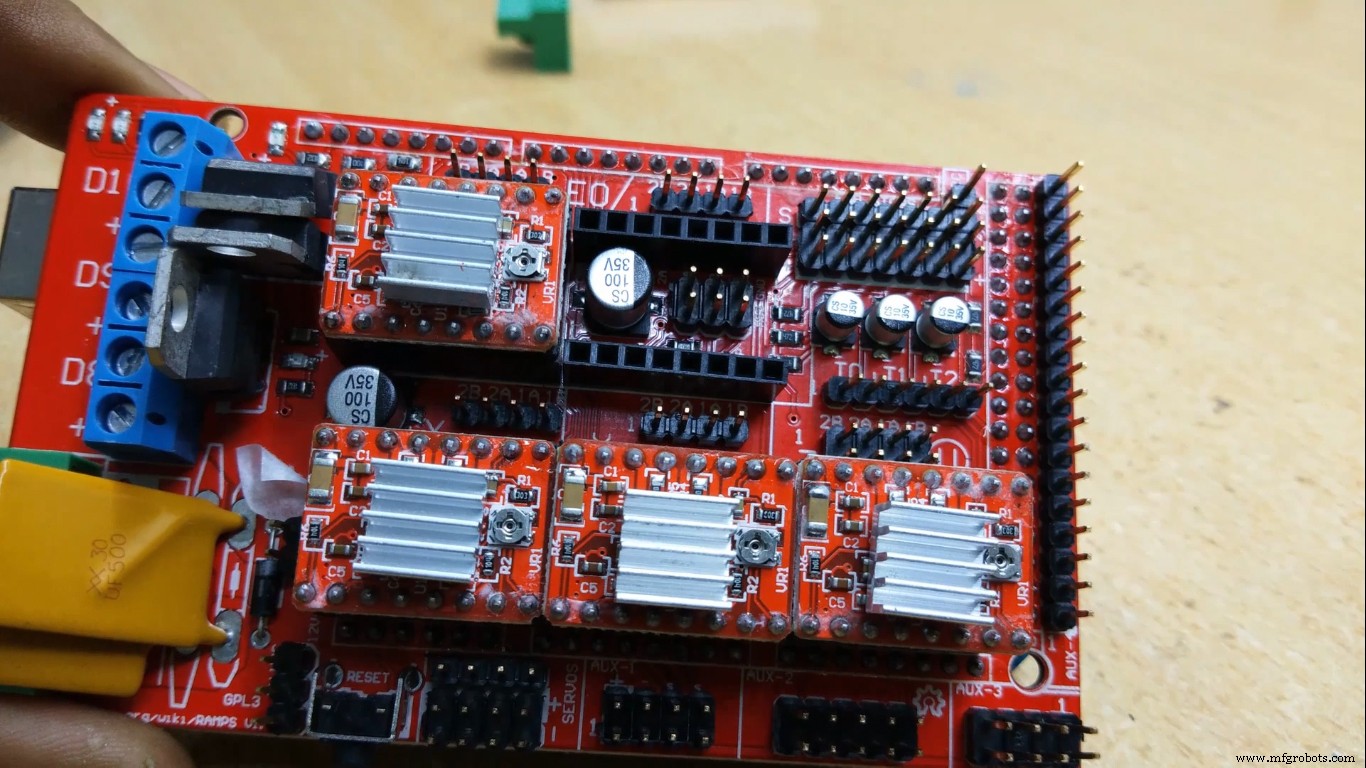
- A4988ステッピングモータードライバーx04番号
- 電源12V / 20A x01番号
必要な機械部品
- アルミセクションパイプ38mmx38mmx02mm
- 厚さ3mmのアクリルシート
- 直径12mmのスチールロッド696mmx02番号
- 直径8mmのスチールロッド562mmx02番号
- 直径8mmのスチールロッド507mmx02番号
- 3mmアルミニウムシート
- SC8UU8mmリニアモーションボールベアリングスライドブッシュX08番号
- SC12UU12mmリニアモーションボールベアリングスライドブッシュX04番号
- SK12UUリニアレールシャフトロッドx04番号
- SK8UUリニアレールシャフトロッドx04番号
- ペデスタルベアリング8mmKP08 x02番号
- T8 8mm親ねじ(ナット付き)500〜550mm x02番号
- ステッピングモーターカプラー5mm〜8mm x02番号
- GT2 20歯フランジ付きプーリー(5mmシャフトx02番号用)
- Nema17取り付けブラケットx02番号
- 押出機x01番号
- 3Dプリンター用1.75mmPLAフィラメントx01Kg。
- GT2プーリー用タイミングベルトx04メートル。
電気部品の簡単な紹介:
- ランプ1.4コントローラーボード:
一般的に、エンドストップスイッチ、ステッピングモータードライバー、ヒートベッド、ホットエンドなどのサーバルをArduinoと接続するために使用されます。
- 光学式エンドストップスイッチ:
これはセンサースイッチの一種であり、3DプリンターのXYZ軸が終了位置に達すると、NOまたはNC(通常開または通常閉)スイッチがトリガーされます。
エンドストップスイッチは、一般的に2種類あります。1。光学式2.単純機械式。好きなものを使うことができます。
- NEMA 17ステッピングモーター:
1回転1.8度で200段のステッピングモーターを使用しました
- PCBヒートベッド:
ヒートベッドは、押し出されたプラスチックを暖かく保ち、反りを防ぎます。
- E3D v6ホットエンド:
ノズルは0.4mmで、温度センサー/サーミスタを取り付けてフィラメントを加熱することでフィラメントが出てきます。
- A4988ステッピングモータードライバー:
ステッピングモーターは12V / 24Vで動作し、Arduinoピンの出力はHIGH状態のときに5Vであるため、ドライバー回路が必要です。
- 電源12V / 20A:
各ステッピングモーターは1相あたり約1.2Aの電流を消費し、合計5つのステッピングモーターが使用され、他の電気部品はある程度の電流を消費するため、最小20Aの電流が適切です。
だから始めましょう!
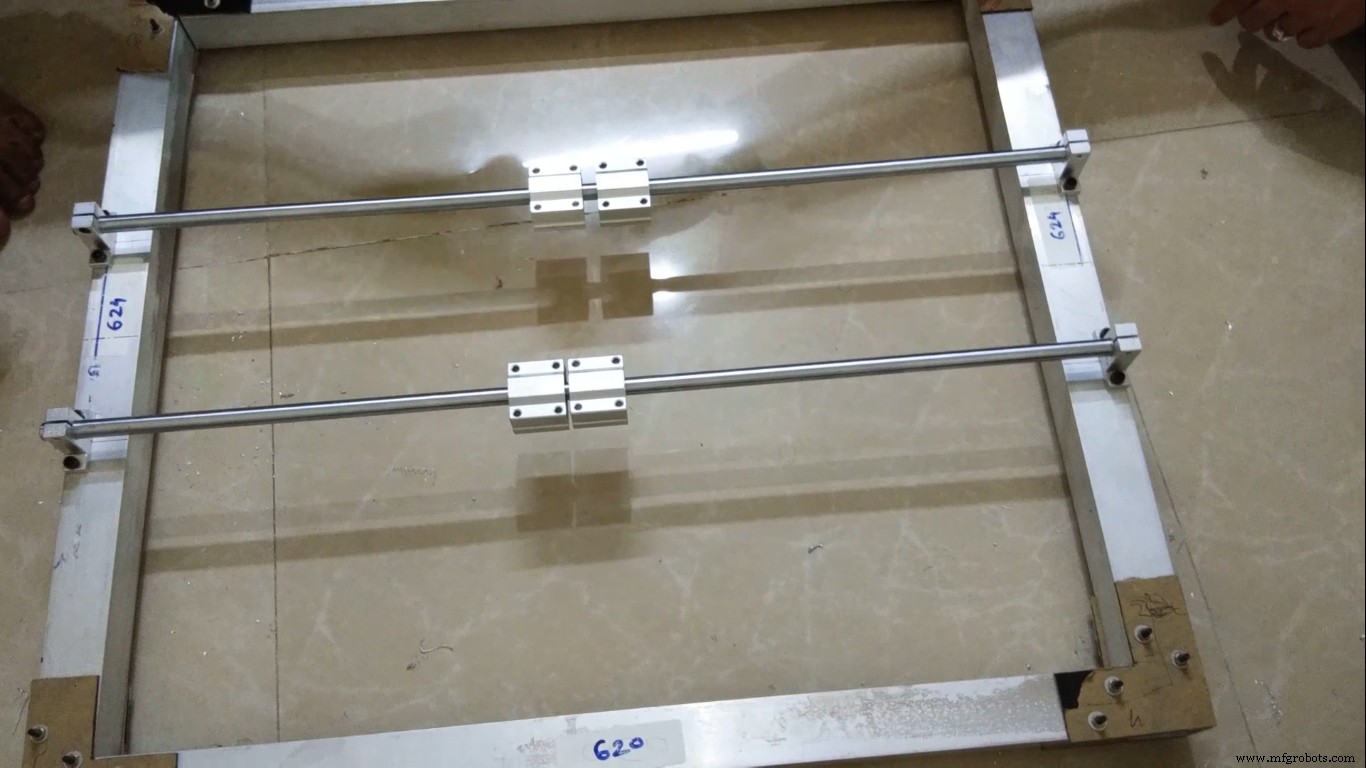
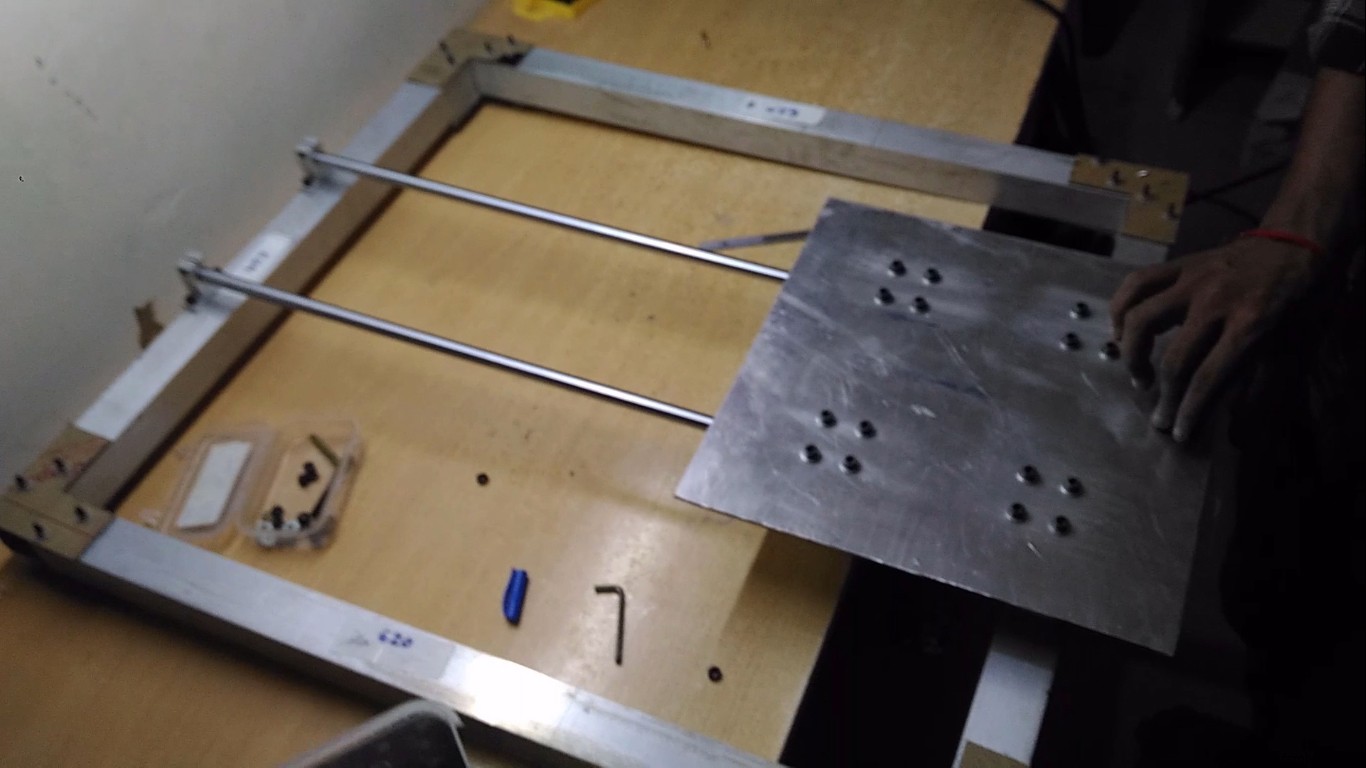
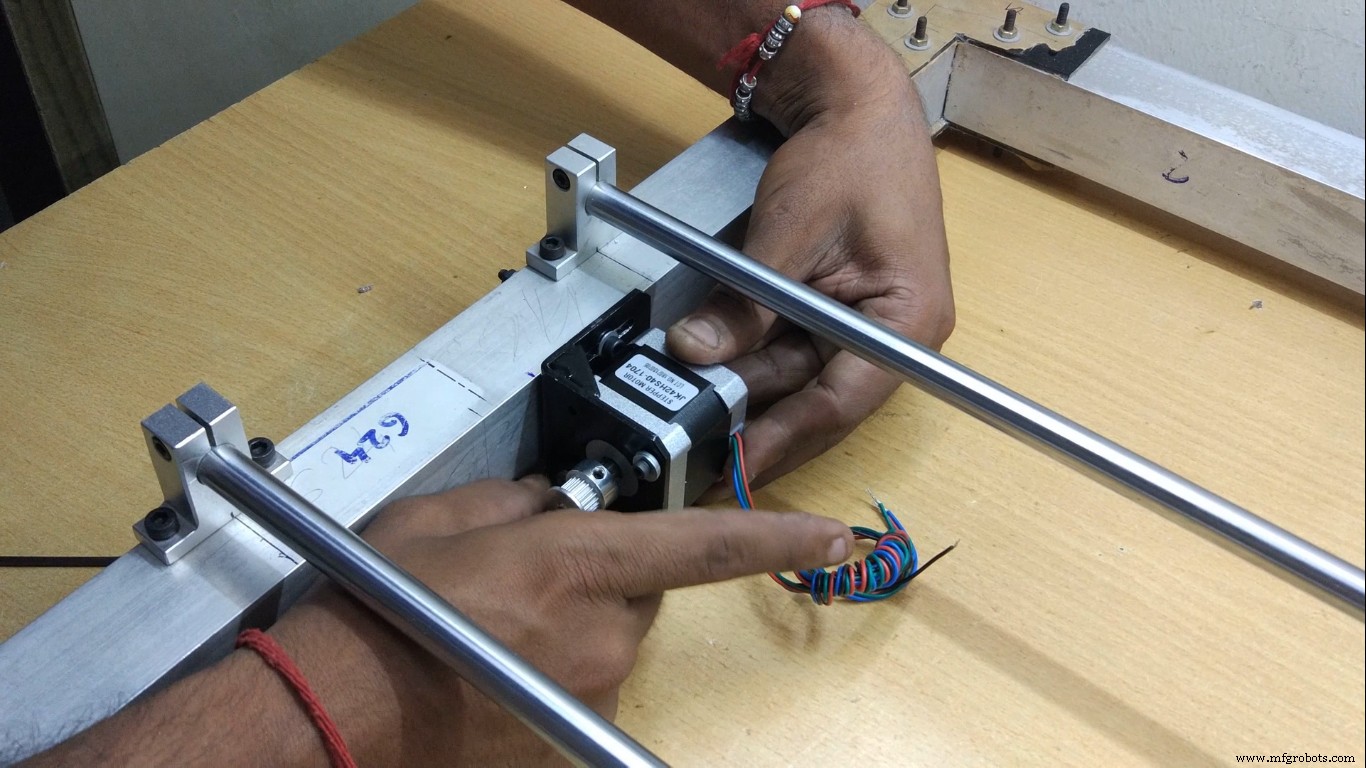
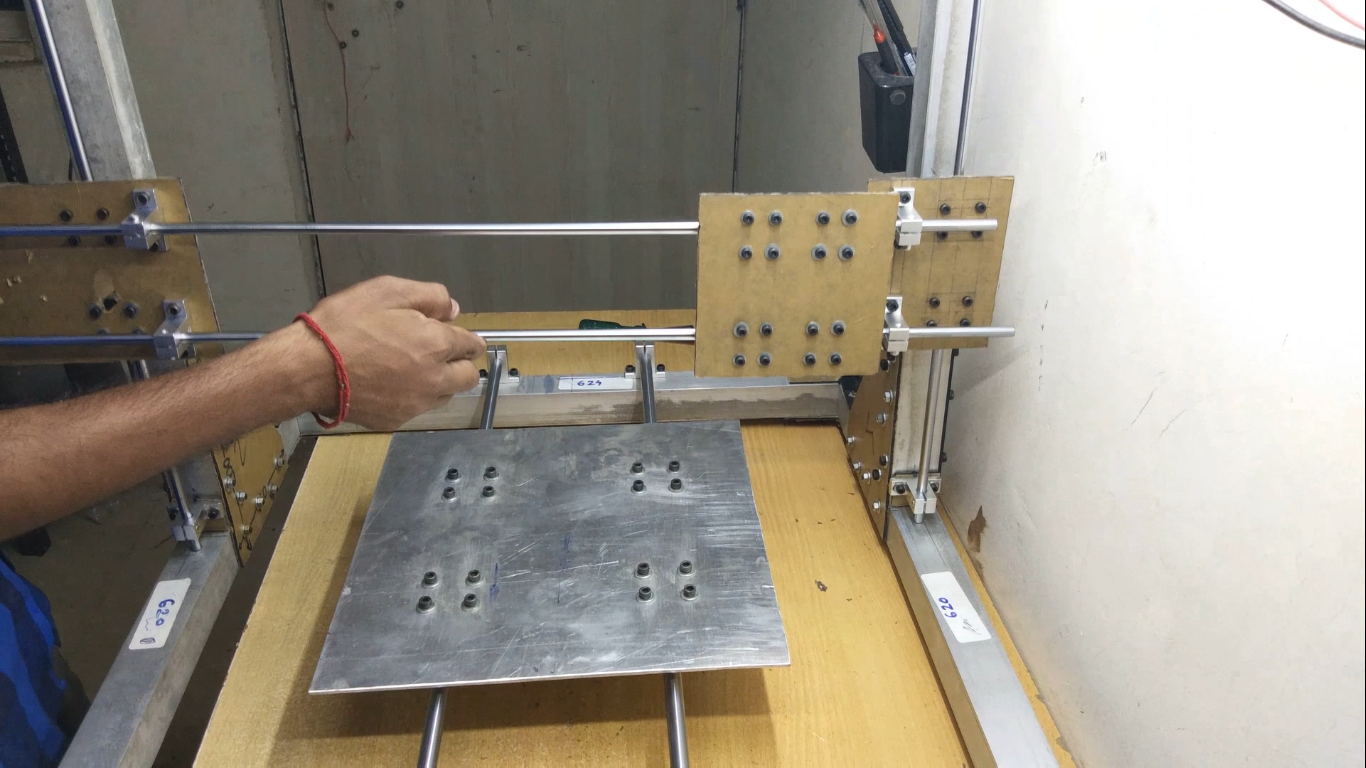
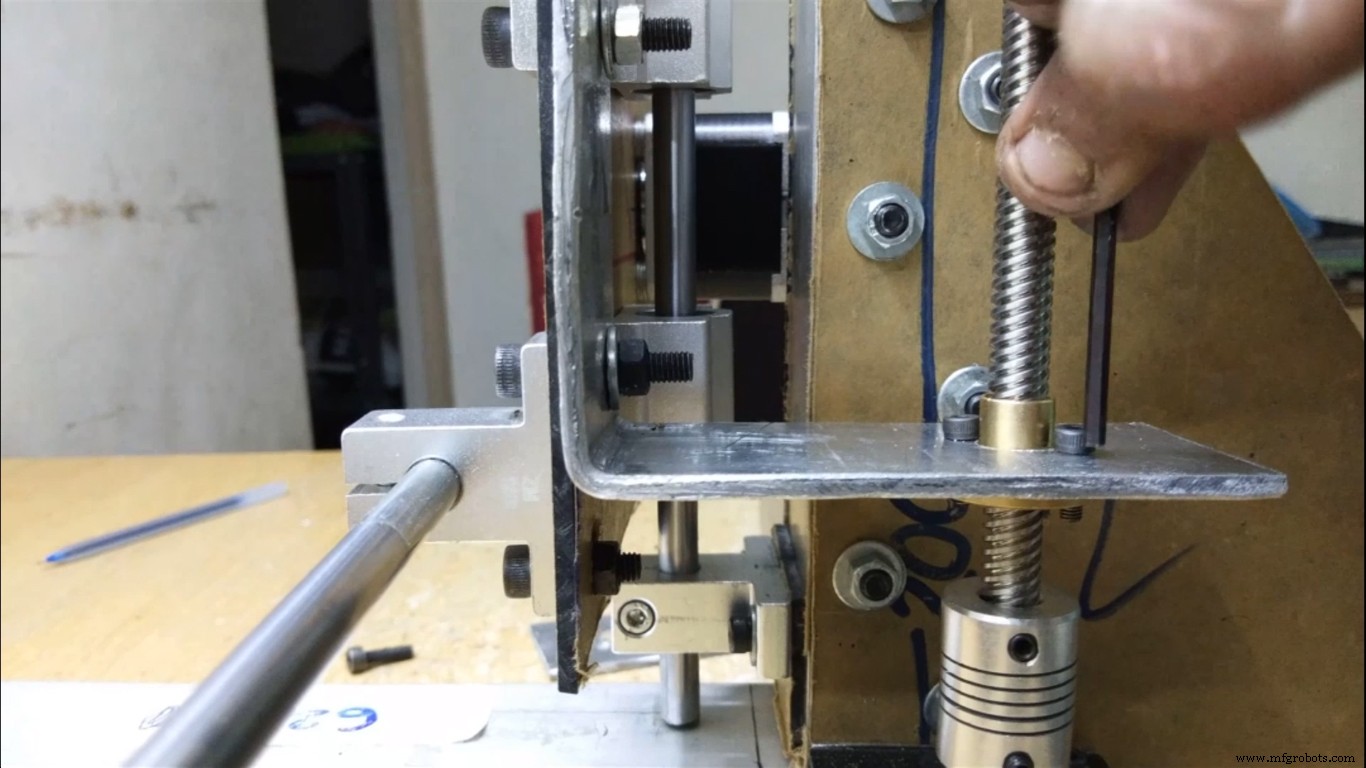
フレームを作成する
まず、CADモデルの寸法に基づいてフレームを作成します。さまざまなパーツの寸法については、すでに26ページのPDFを添付しており、必要な数量が含まれています。部品の数とその寸法 、必要に応じて寸法を変更できます。次に、すべての異なるパーツを一緒に組み立てます。詳細については、私のYouTubeビデオをご覧ください。
<図>
<図>
<図>

<図>
<図>
<図>
<図>

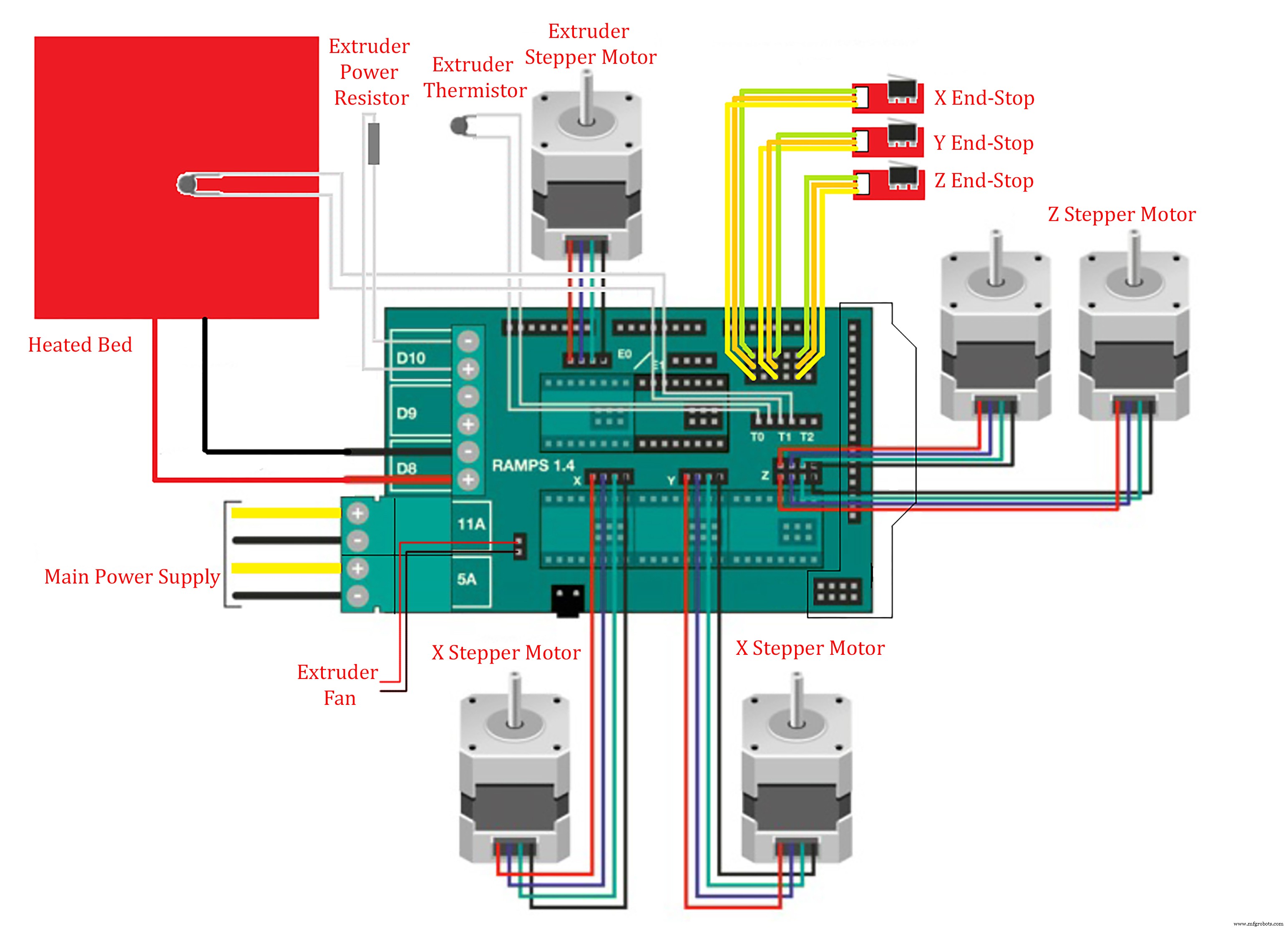
電気接続
このシーンでは、回路図と回路図の画像に従って、必要なものをすべて接続します。そして主電源には12V、20ADC電源を使用しました。詳細については、30:57から33:15までのYouTubeビデオを参照してください。
<図>
<図>
<図>

<図>
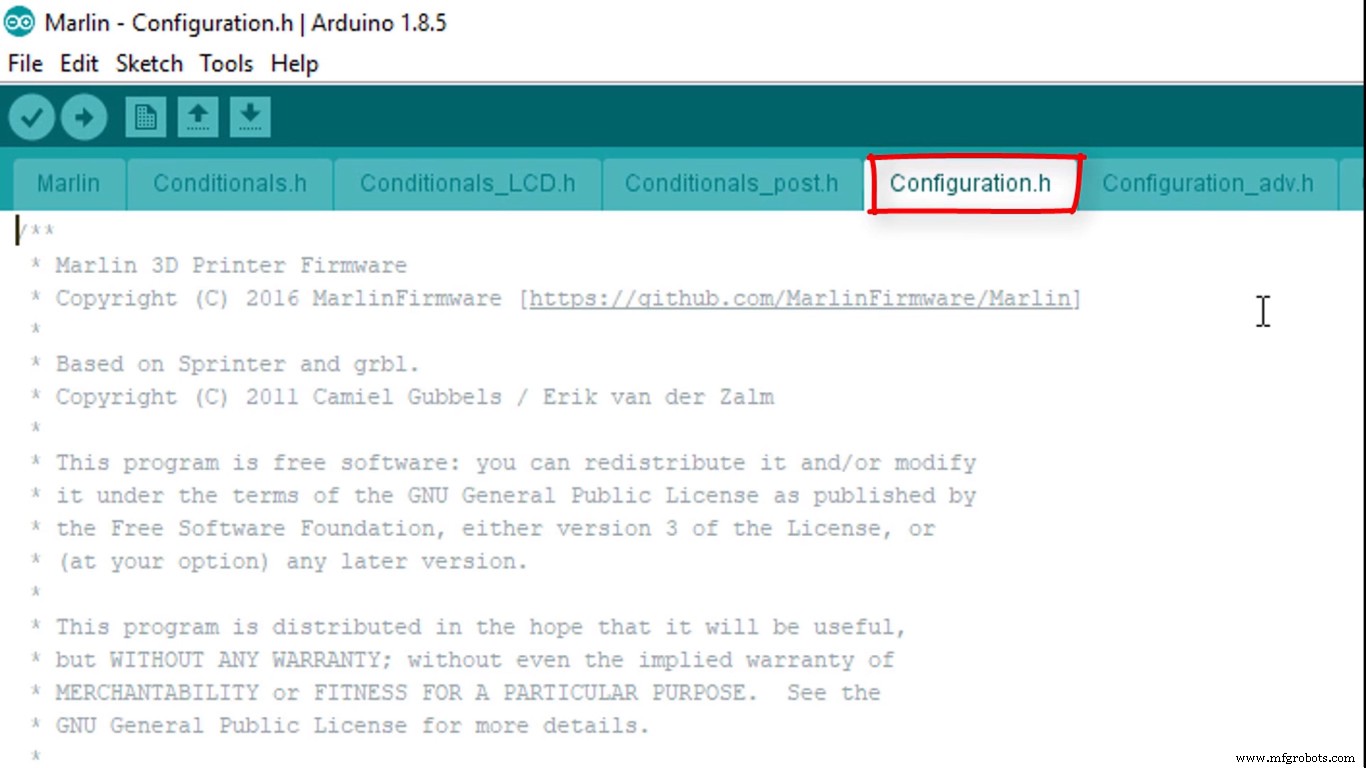
コーディング
コーディング部分には、Arduino IDEソフトウェアを使用し、marlinファームウェアを使用しました。
ダウンロードするには
- Arduino IDE:https://www.arduino.cc/en/Main/Software
- Marlinファームウェア:http://marlinfw.org/
詳細については、33:18から37:51までのYouTubeビデオを参照してください。
<図>
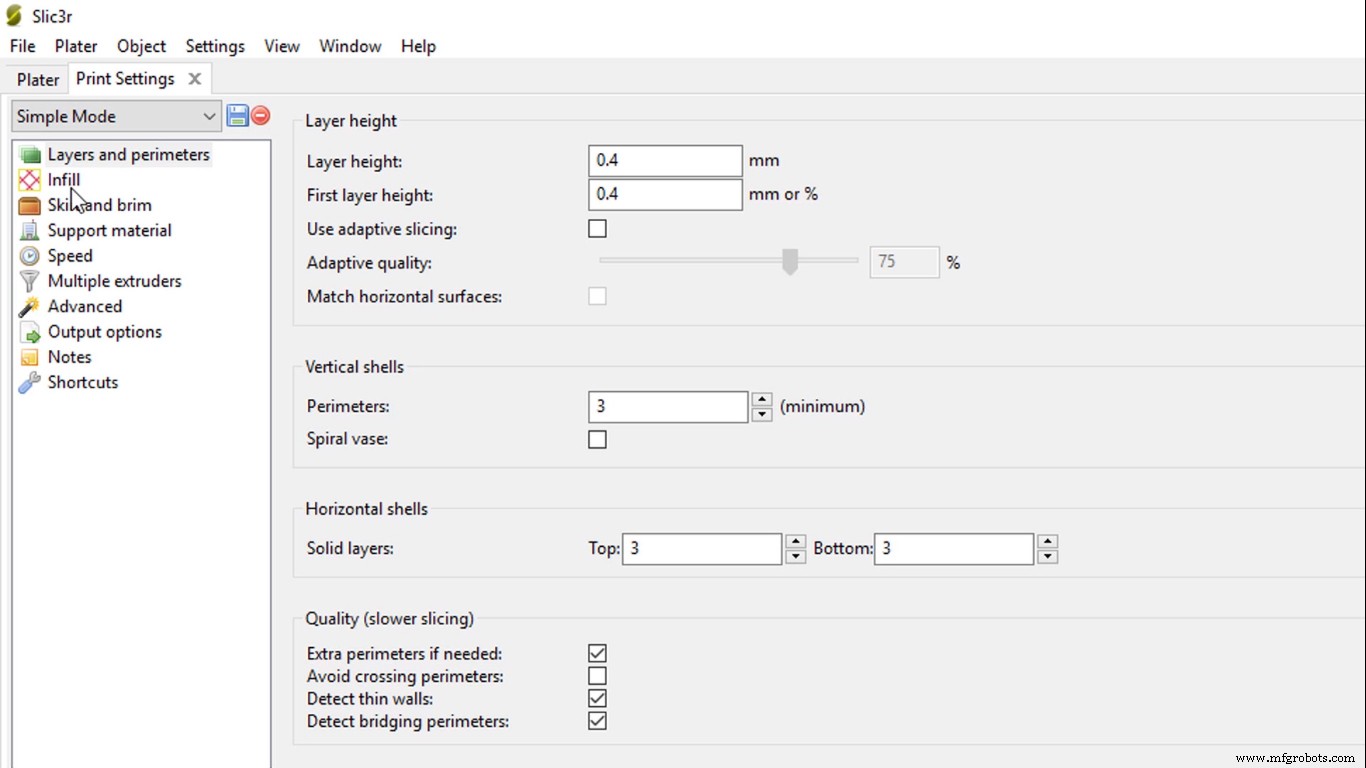
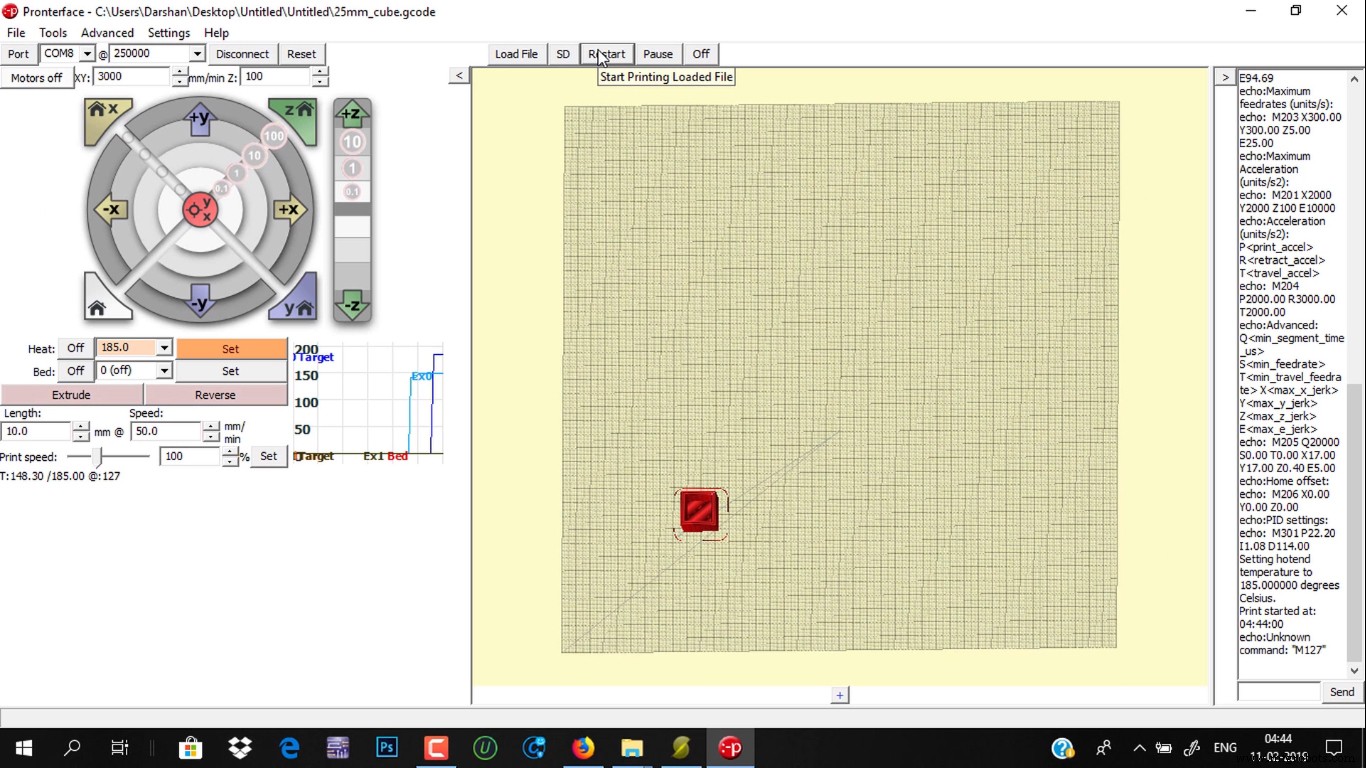
3D印刷ソフトウェア
次のようなオープンソーススライサーアプリケーション用のソフトウェアは他にもあります:
3D Slicer、Slic3r、Ultimaker Cura、Repetier-ホストしかし私は使用しました。
- Slic3r:https://slic3r.org/
- Printrun:http://www.pronterface.com/
詳細については、38:24から43:10までのYouTubeビデオを参照してください。
<図>
<図>
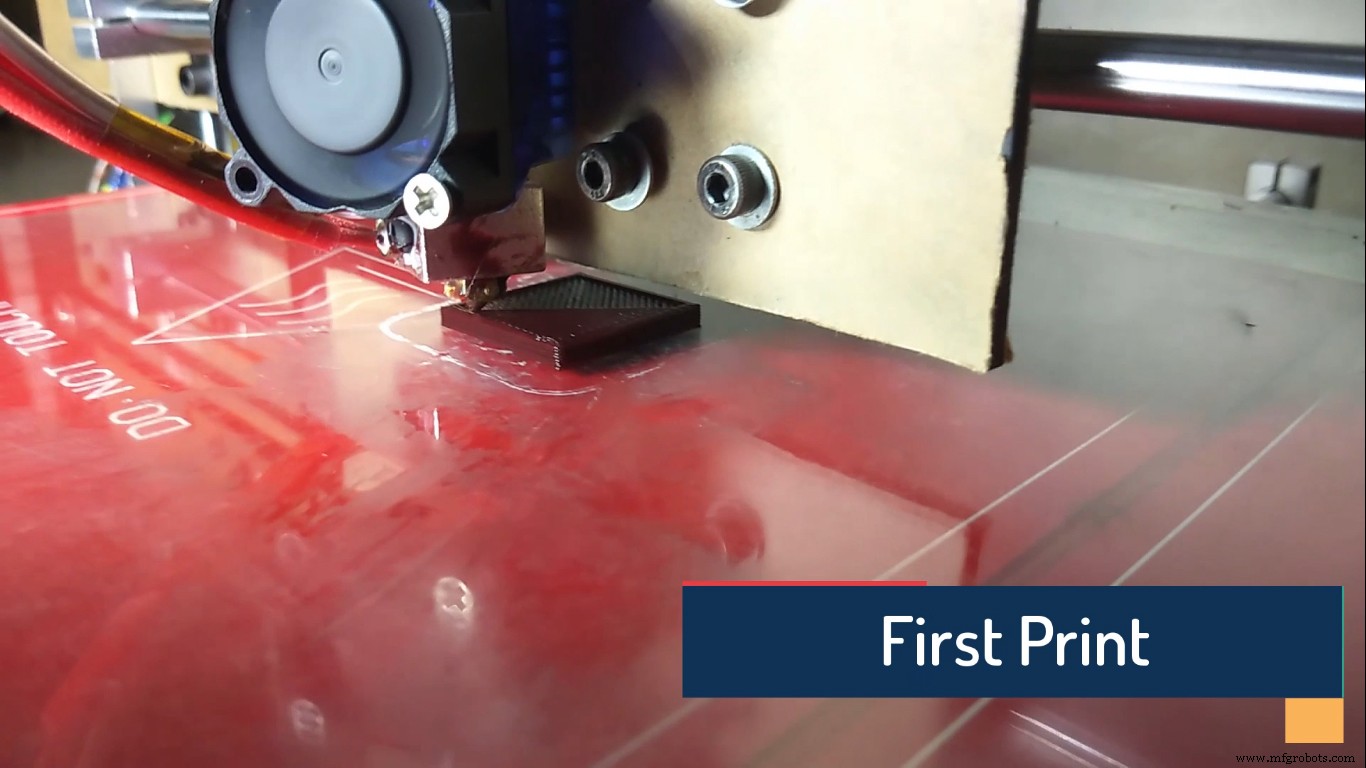
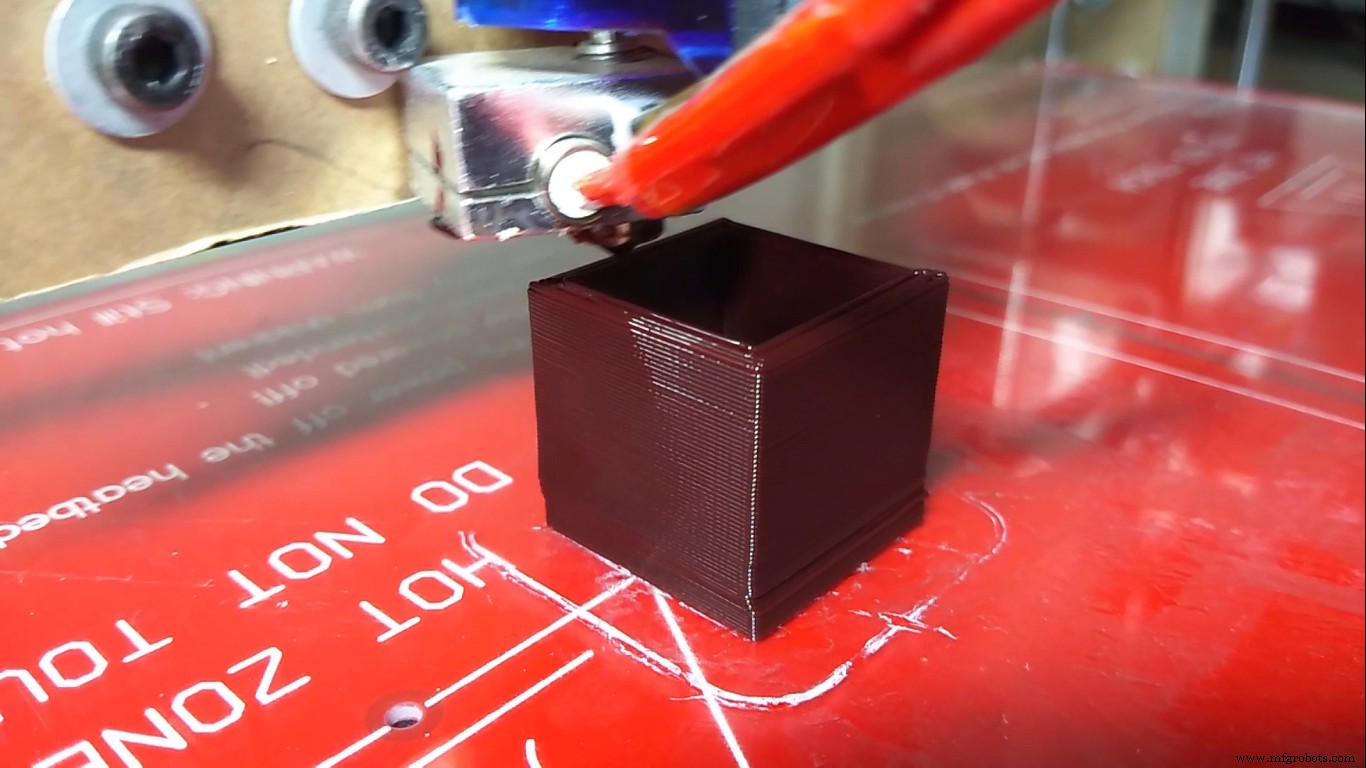
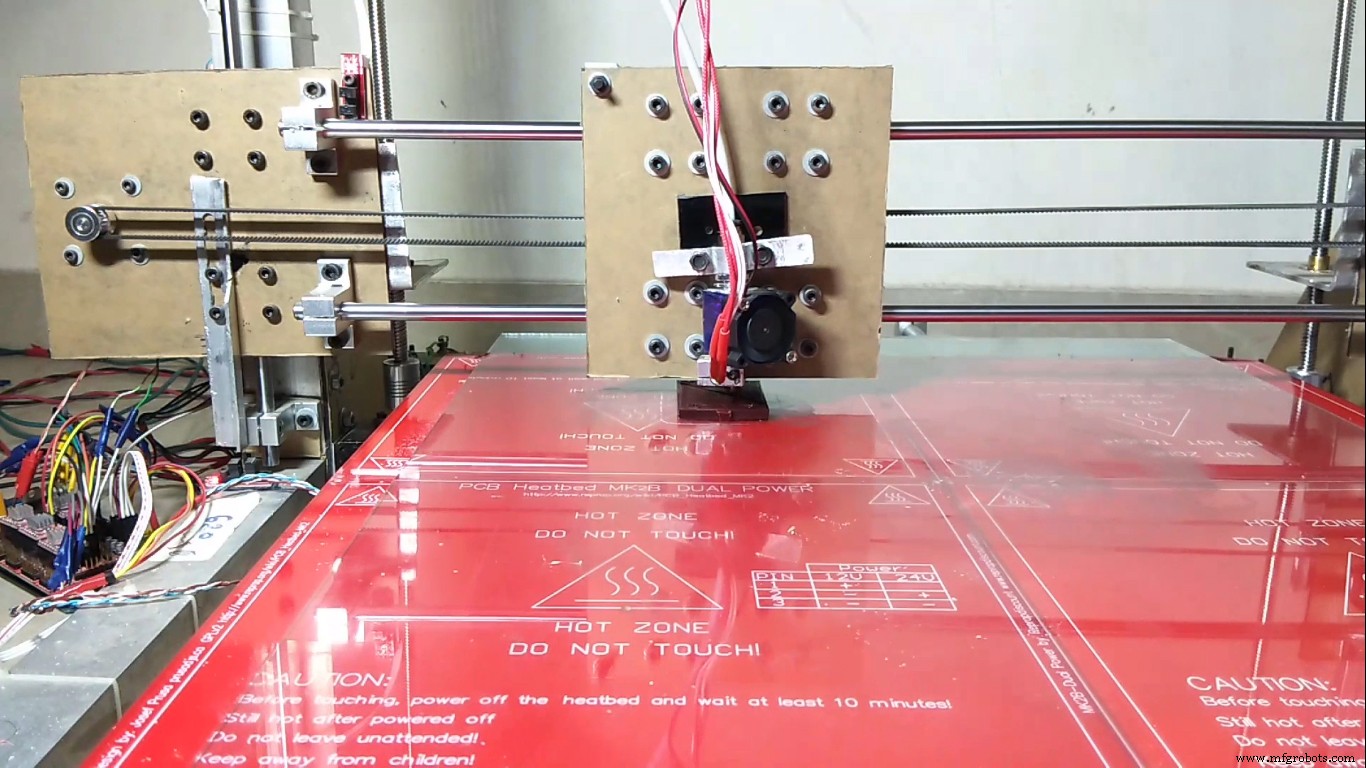
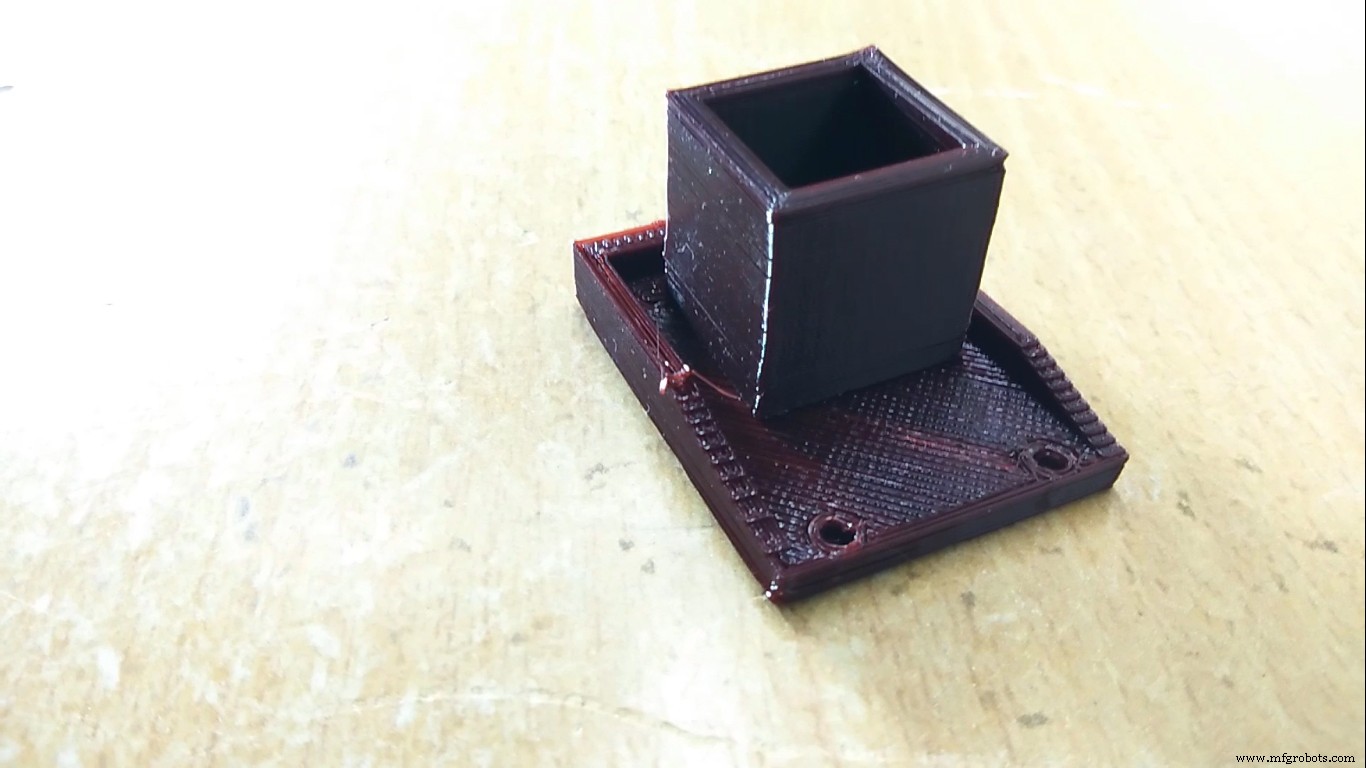
出力結果
結局のところ、私はすべての作業を完了し、プリンターは印刷の準備ができています。添付の画像は、私の3Dプリンターからの最初の印刷の結果です。
<図>
 <図>
<図>  <図>
<図> 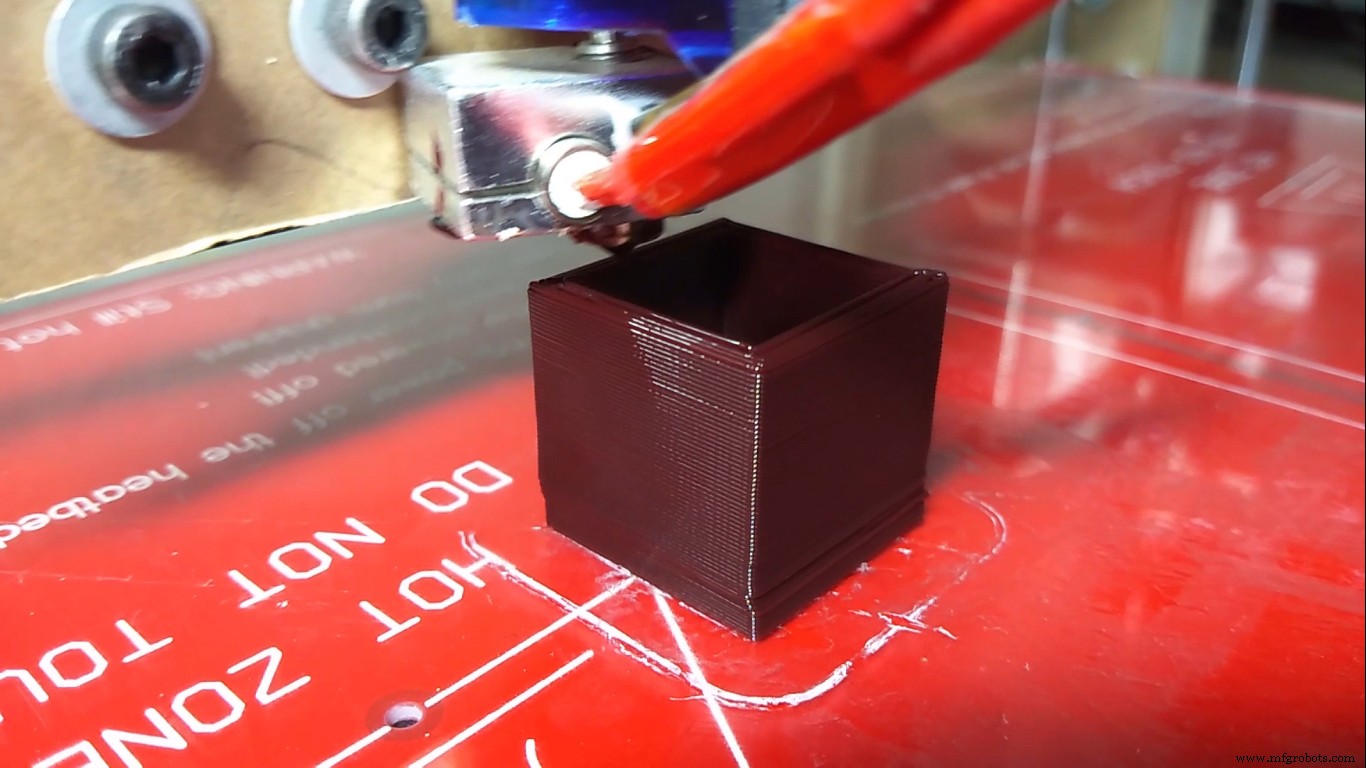 <図>
<図> 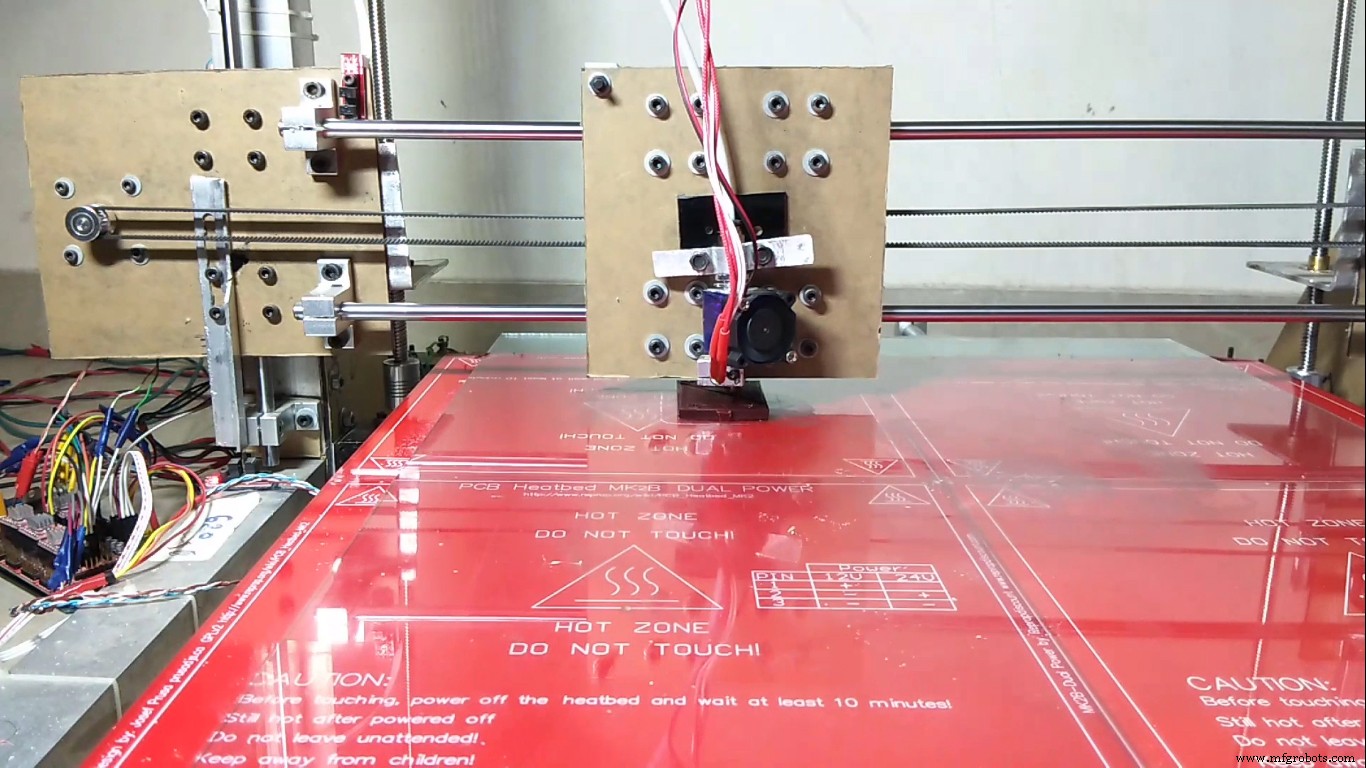 <図>
<図> 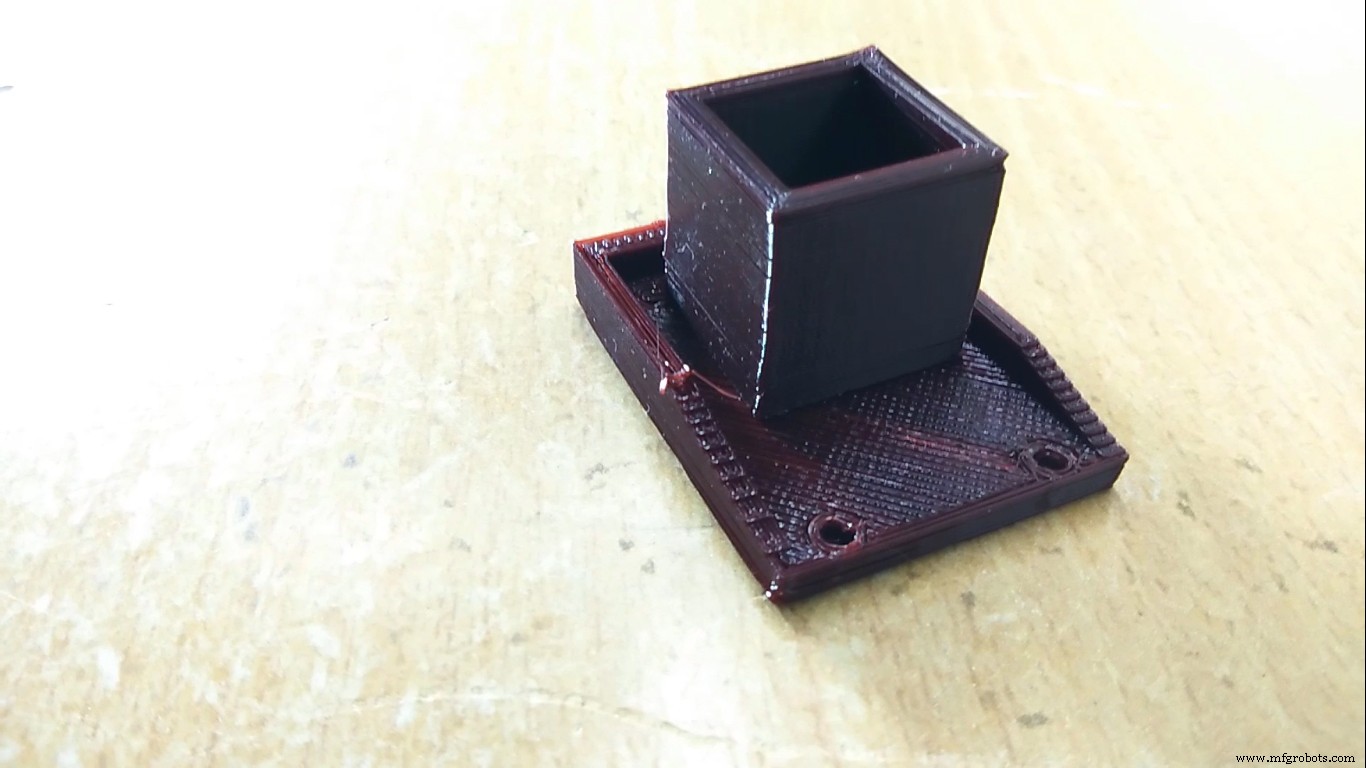
<図>

<図>
<図>
<図>
コード
- Marlin-1.1.x.zip(marlinファームウェア)
Marlin-1.1.x.zip(marlinファームウェア) Arduino
3Dプリンター用のmarlinファームウェアarduinoコードプレビューなし(ダウンロードのみ)。
カスタムパーツとエンクロージャー
25 mmキャリブレーションキューブ3Dプリンターフレームの寸法、必要な部品とその数量 回路図
ステッピングモーターの接続図、Ramps 1.4、Arduino mega、エンドストップスイッチ、ステッピングモータードライバー、 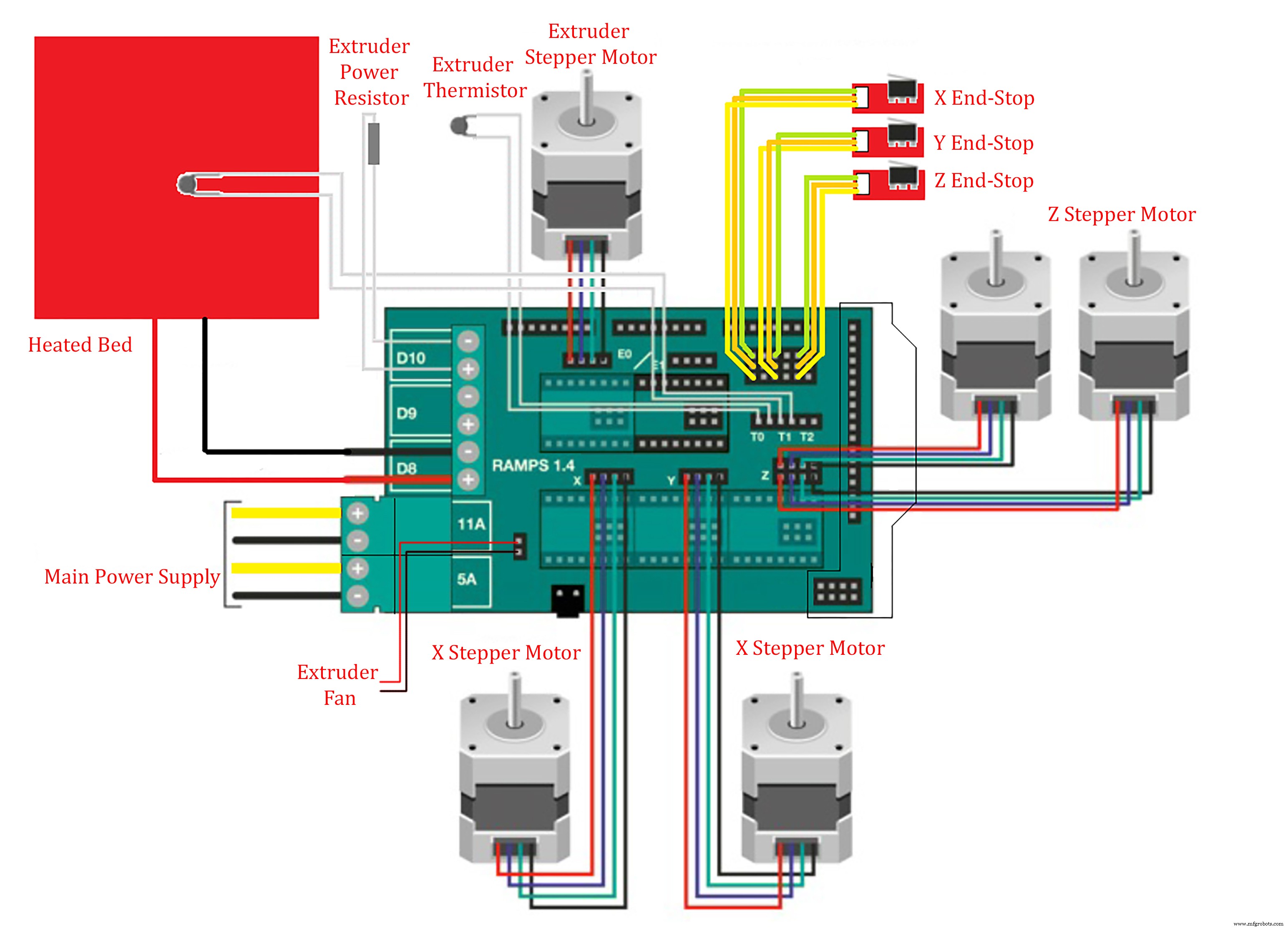
製造プロセス