


自宅でDIY宿題ライティングマシンを作る
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
必要なツールとマシン
>  |
|
アプリとオンラインサービス
>  |
|
このプロジェクトについて
<図>
 <図>
<図>  <図>
<図> 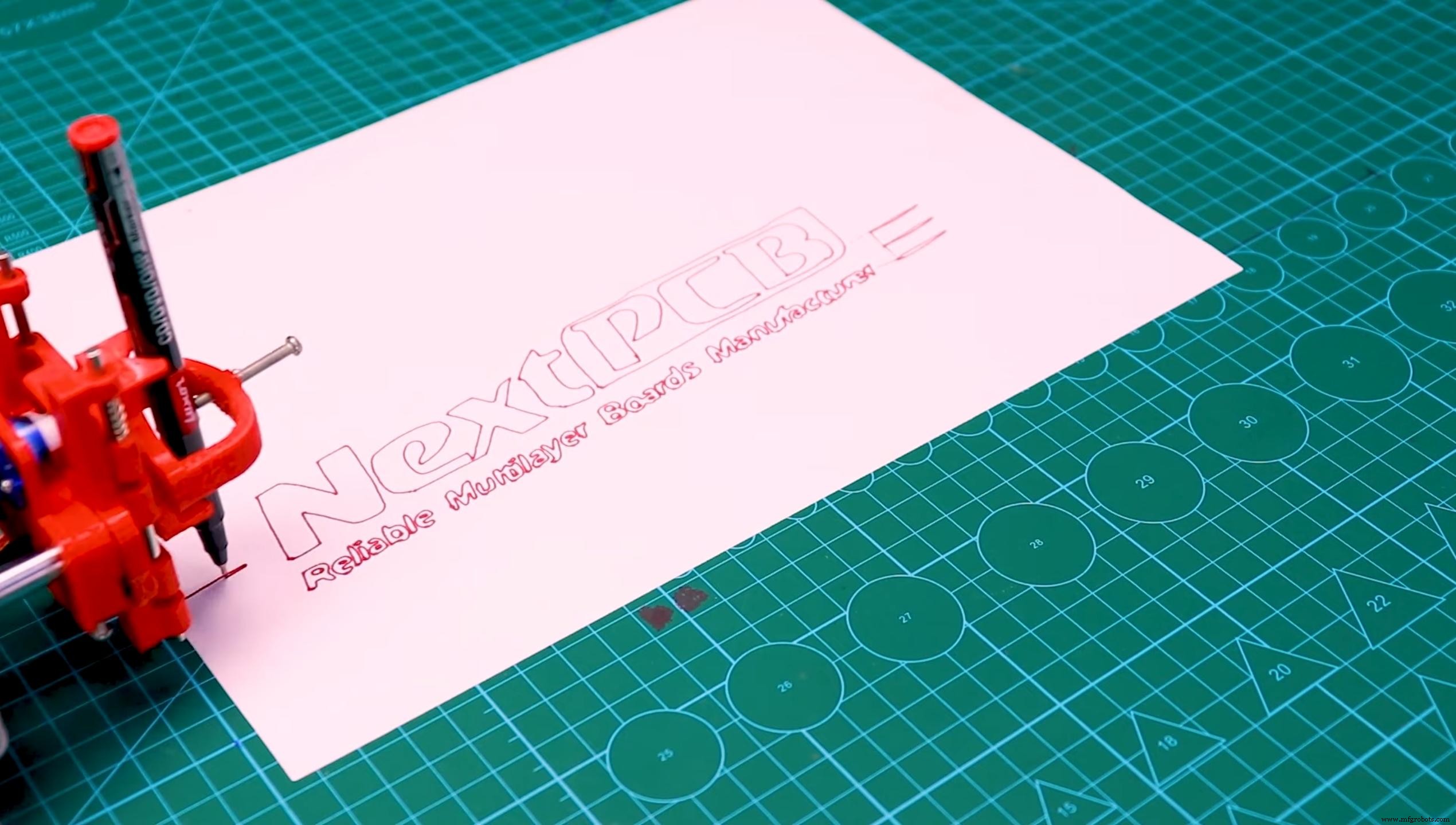
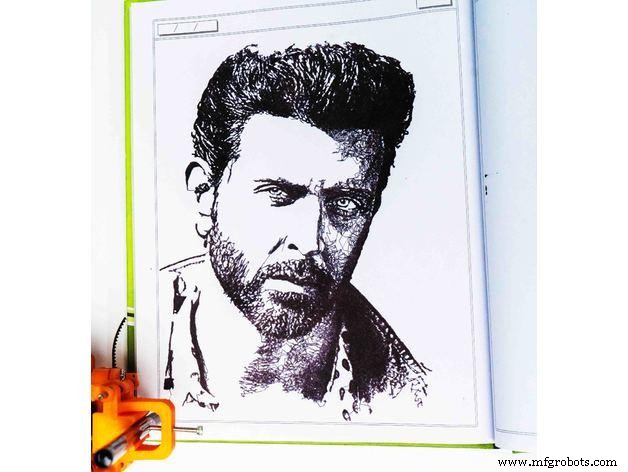
描画ロボット/ペンプロッター/描画マシンは、有名なマシンAxiDrawのオープンハードウェアバージョンであり、ペンプロッターであり、ほぼすべての平面に描画または描画できます。ペン、油性ペン、鉛筆、その他の筆記具で書くことができ、さまざまなアプリケーションを処理できます。
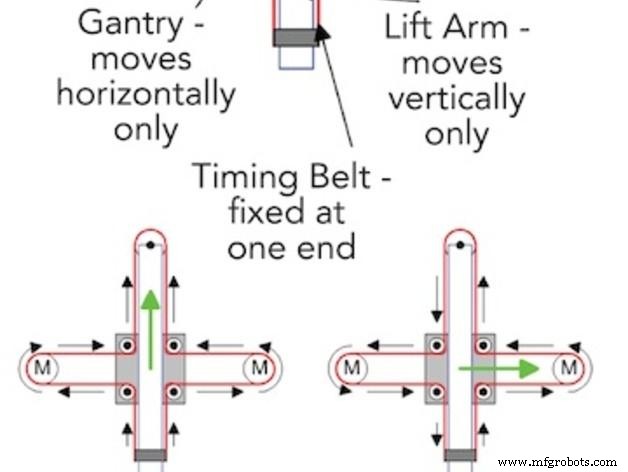
そのユニークなデザインは、マシンを超えて伸びるライティングヘッドを特徴としており、マシン自体よりも大きなオブジェクトを描くことができます。マシンの最大の利点は、マシンのコアXY拡張設計により、本の上に配置できることです。
この描画ロボット/ペンプロッター/描画機は、市販のAxiDrawに似ています。 Arduino Unoコントローラーを搭載し、CNCシールド、GRBLファームウェアを使用しています
描画ロボットの構築コストは、パーツを購入する場所と、Arduinoなどのパーツを既に所有しているかどうかによって異なりますが、75ドルの間です。
私のすべてのプロジェクトはhttps://www.diyprojectslab.com/
にあります。最大描画領域24 * 30CM。
ありがとうNextPCB
NextPCBの支援とサポートにより、このプロジェクトは正常に完了しました。 PCBプロジェクトをお持ちの場合は、ウェブサイトにアクセスして、エキサイティングな割引やクーポンを入手してください。
送料無料0 $ PCBプロトタイプ:https://www.nextpcb.com/pcb-quote?act =2&code =Romeo ...
感謝祭のクリスマスラッキードロー100%勝利:https://www.nextpcb.com/christmas-lucky-draw?code ...
ステップ1:必要な部品と材料 <図>
 <図>
<図> 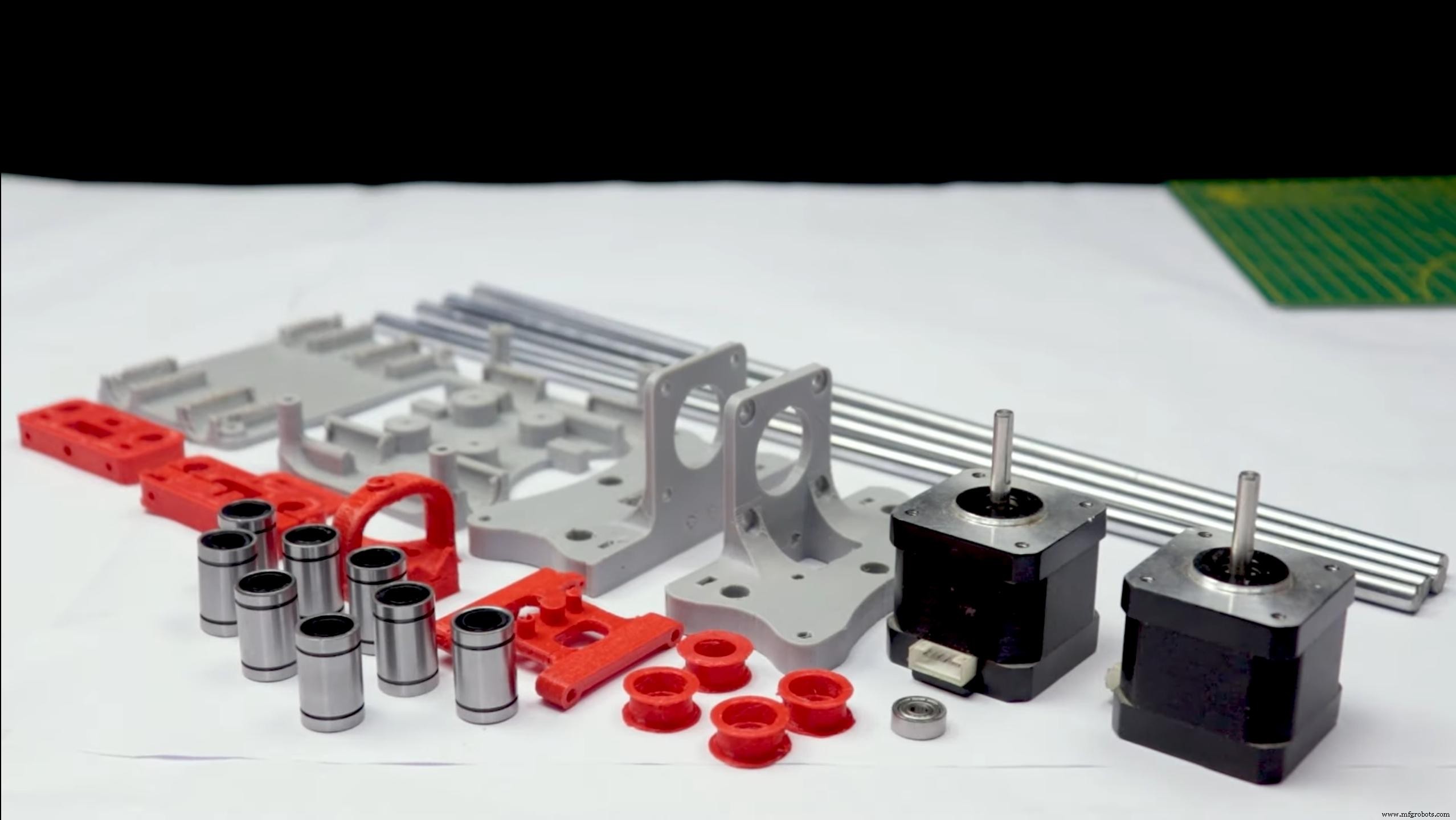
2 x Nema17ステッピングモーターAmazon.com
X軸Amazon.com用の2xリニアロッドM8x 450mm
Y軸Amazon.com用の2xリニアロッドM8x 350mm
Z軸用の2xリニアロッド3mm(古いCDROMから入手できます)
1xスレッドロッドM8x 480mm8 xLM8UUベアリングAmazon.com
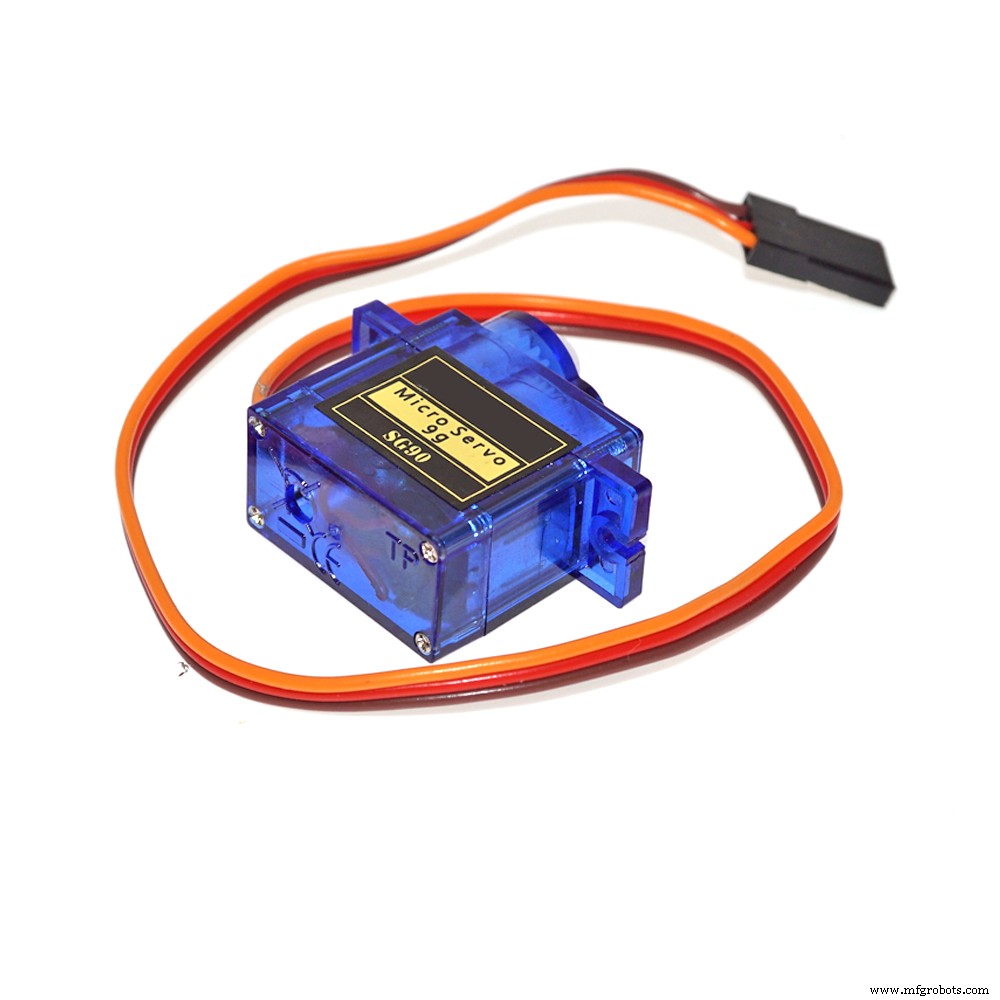
1xサーボSg901xスプリング5m(ボールペンから)Amazon.com
2 x GT2プーリー、16歯Amazon.com
5xベアリング624zzAmazon.com
1 x 2000mmGT2ベルトAmazon.com
1 x Arduino Uno Amazon.com
1 xCNCシールドAmazon.com
ヒートシンク付き2xA4988ステッピングドライバーAmazon.com
6xジャンパーAmazon.com
1 x 12V2A電源装置Amazon.com
ナッツ
- 7 x M3-0.5
- 5 x M4-0.7
- 4 x 5 / 16in-18
アマゾン
ネジ
- 13xフィリップスM3-0.5x 16mm
- 4xフィリップスM3-0.5x 6mm
- 5xフィリップスM4-0.7x35mm
- 1 x Hex M3-0.5 x 20mm
ワッシャー
- 4 x 5/16インチワッシャー
- 4 xM3ワッシャー
ステップ2:3Dプリント <図>
 <図>
<図> 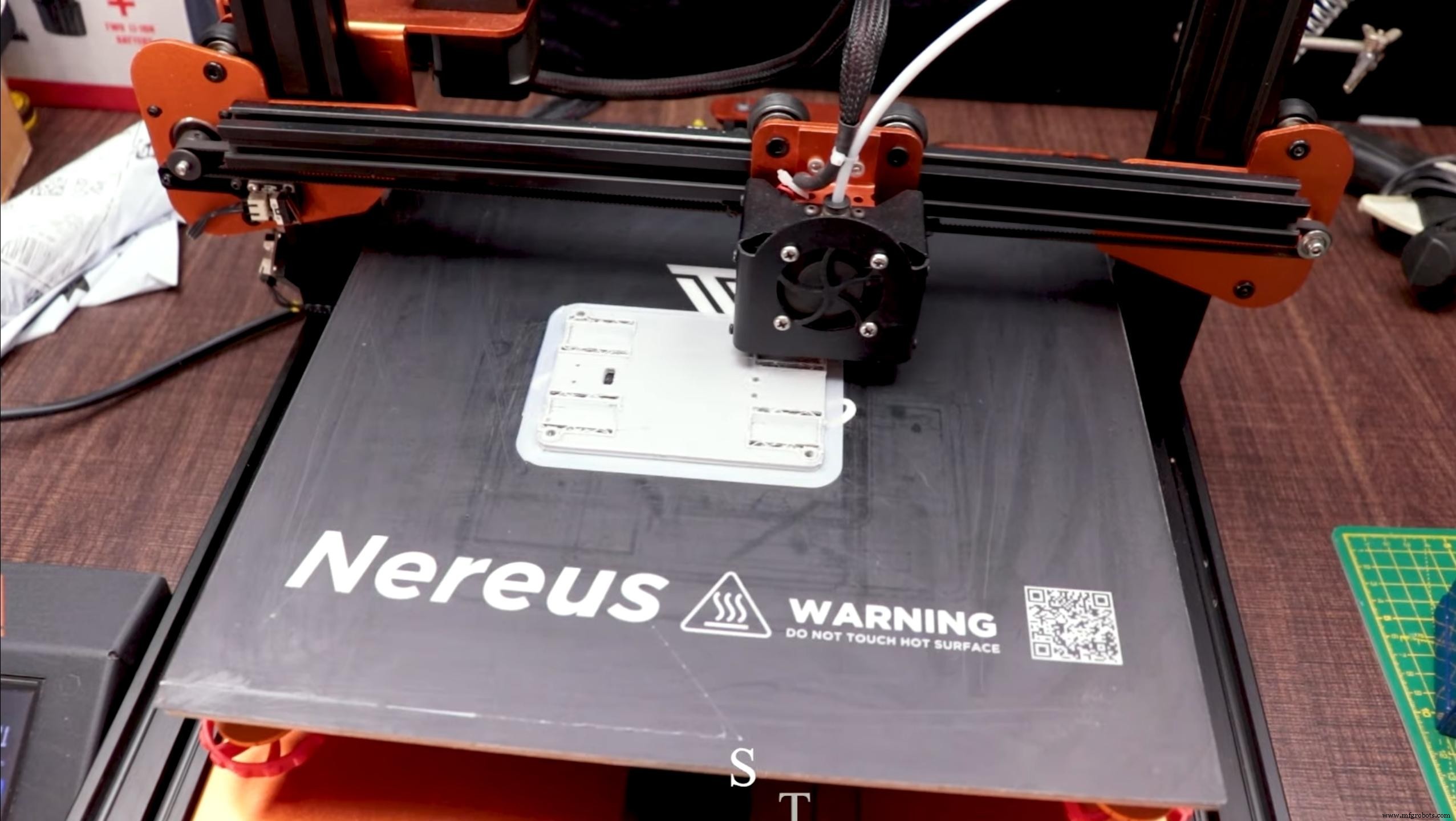
Thingiverseからファイルをダウンロード
Curaまたはその他のスライサーで3Dモデルを開きます。
すべてのパーツに75%のインフィルを使用します(70〜100%のインフィルでも機能します)
層の高さが0.10〜0.20mmのすべての部品を印刷
PLAで印刷
ペンホルダー、スライダー、X_Support_L、X_Support_Rのサポートを使用する
注:最長の部分は約10時間かかり、最短の部分は印刷に30分かかりました
PLAはこの設計に適しています。 BuildTakで200℃で印刷します。いかだやつばを必要とする部品はありません。ペンホルダーと立っているZ軸エンドプレートのみをサポートすることをお勧めします。
ステップ3:X軸を組み立てる <図>
 <図>
<図> 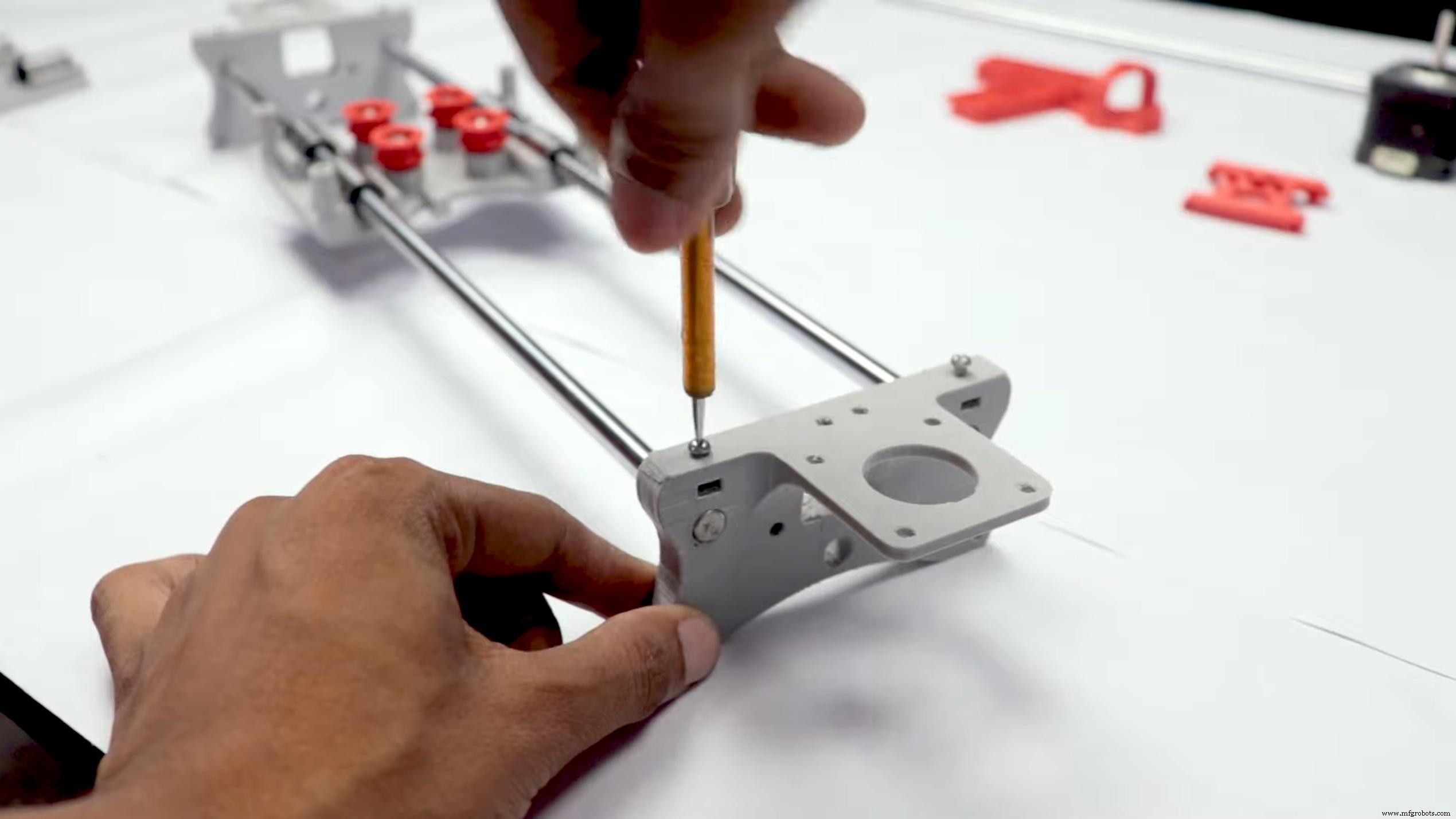
(2)350mmおよび(2)450mmの長さの線形ロッドが必要であることを忘れないでください
(2)450mm 線形ロッドを使用して、いずれかのxサポートパーツに挿入します
- 挿入する穴を滑らかにするために、丸いファイルを使用する必要がある場合があります
- また、ゴム槌を使用してロッドを挿入することもできます
次に、ネジ付きロッドを取り、下の穴に挿入します。 Xサポートパーツの両側に5/16インチのワッシャーと5/16インチのナットを供給します
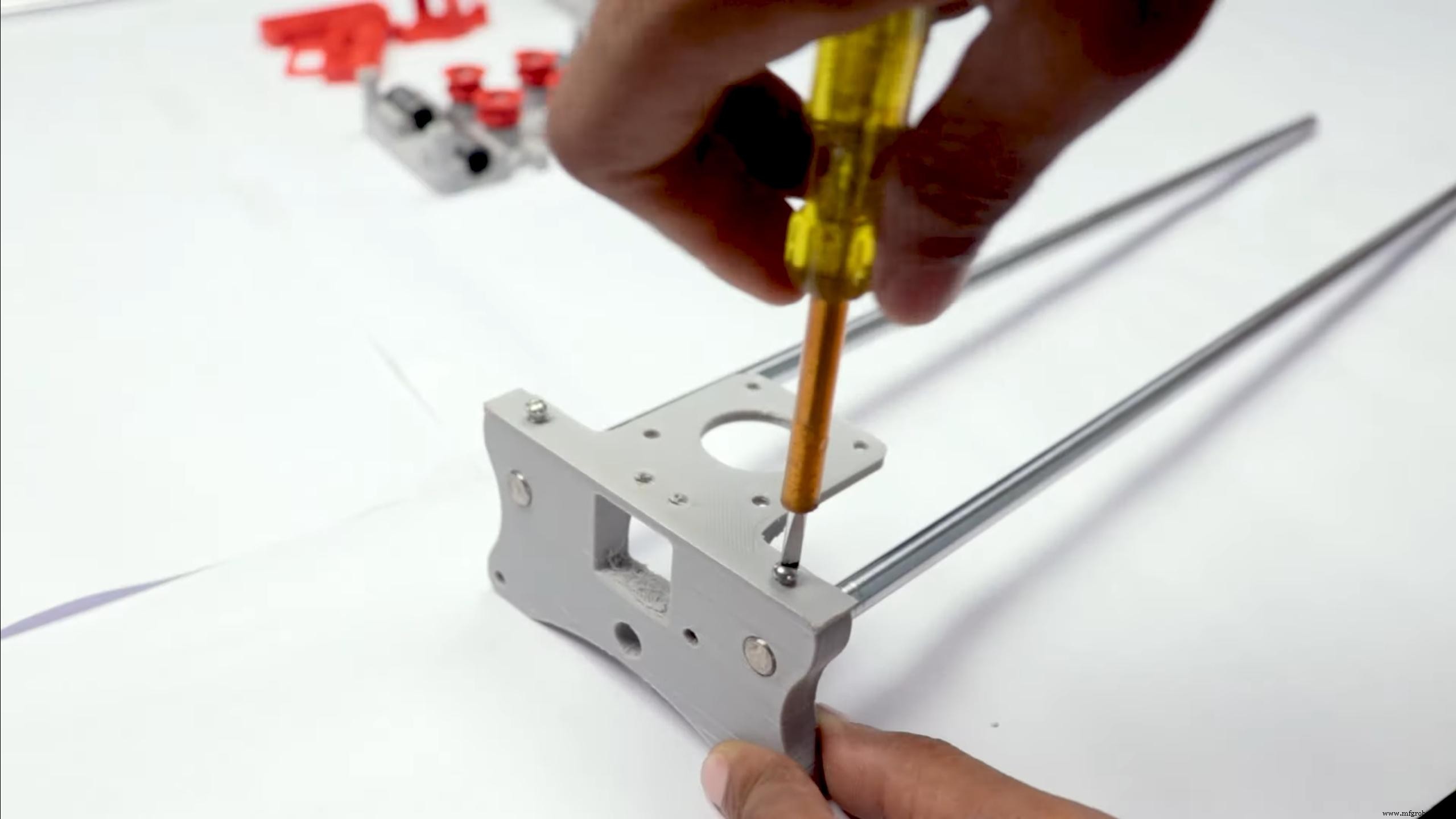
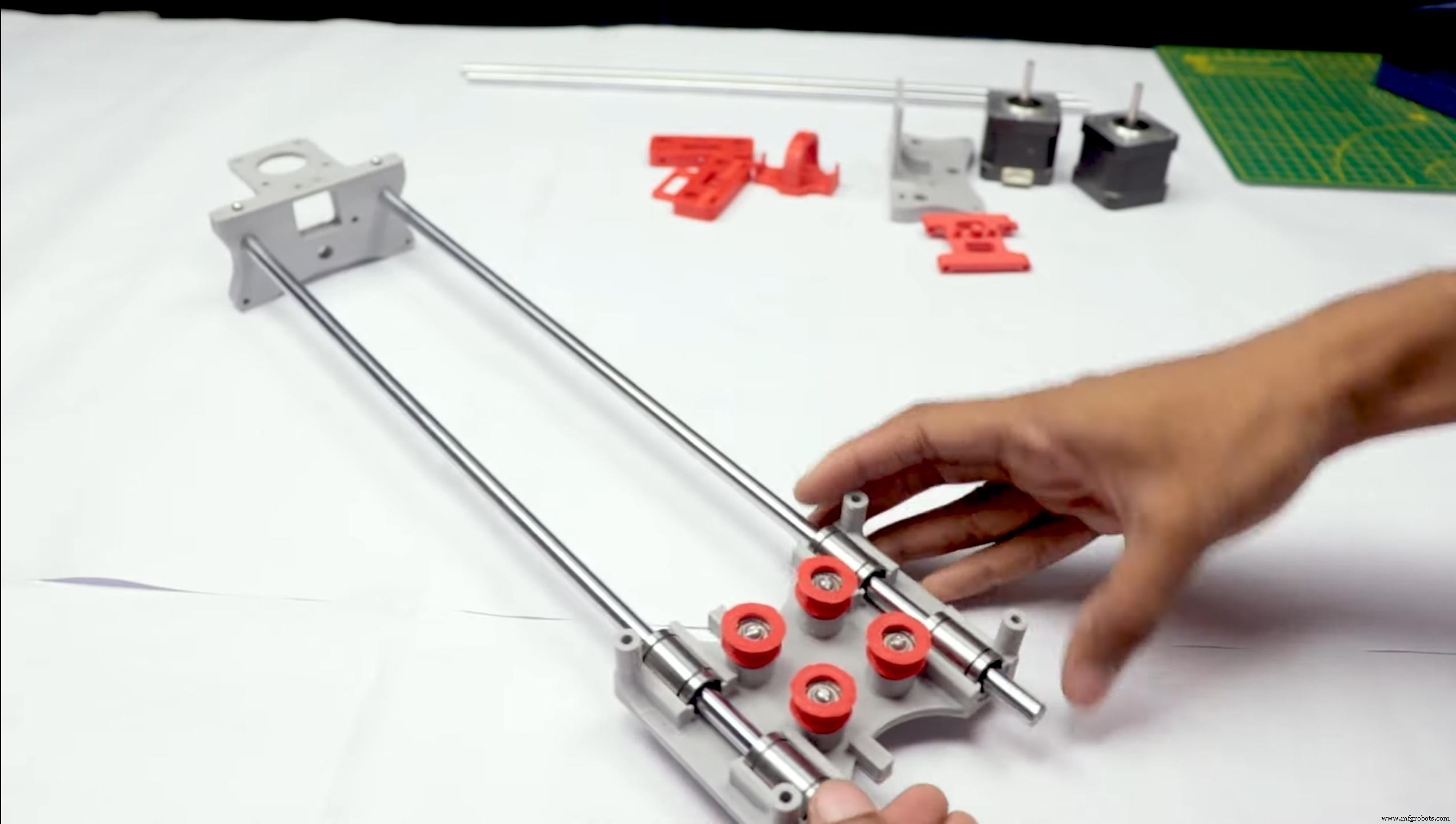
ステップ4:X軸ベアリングを組み立てる <図>
 <図>
<図>  <図>
<図> 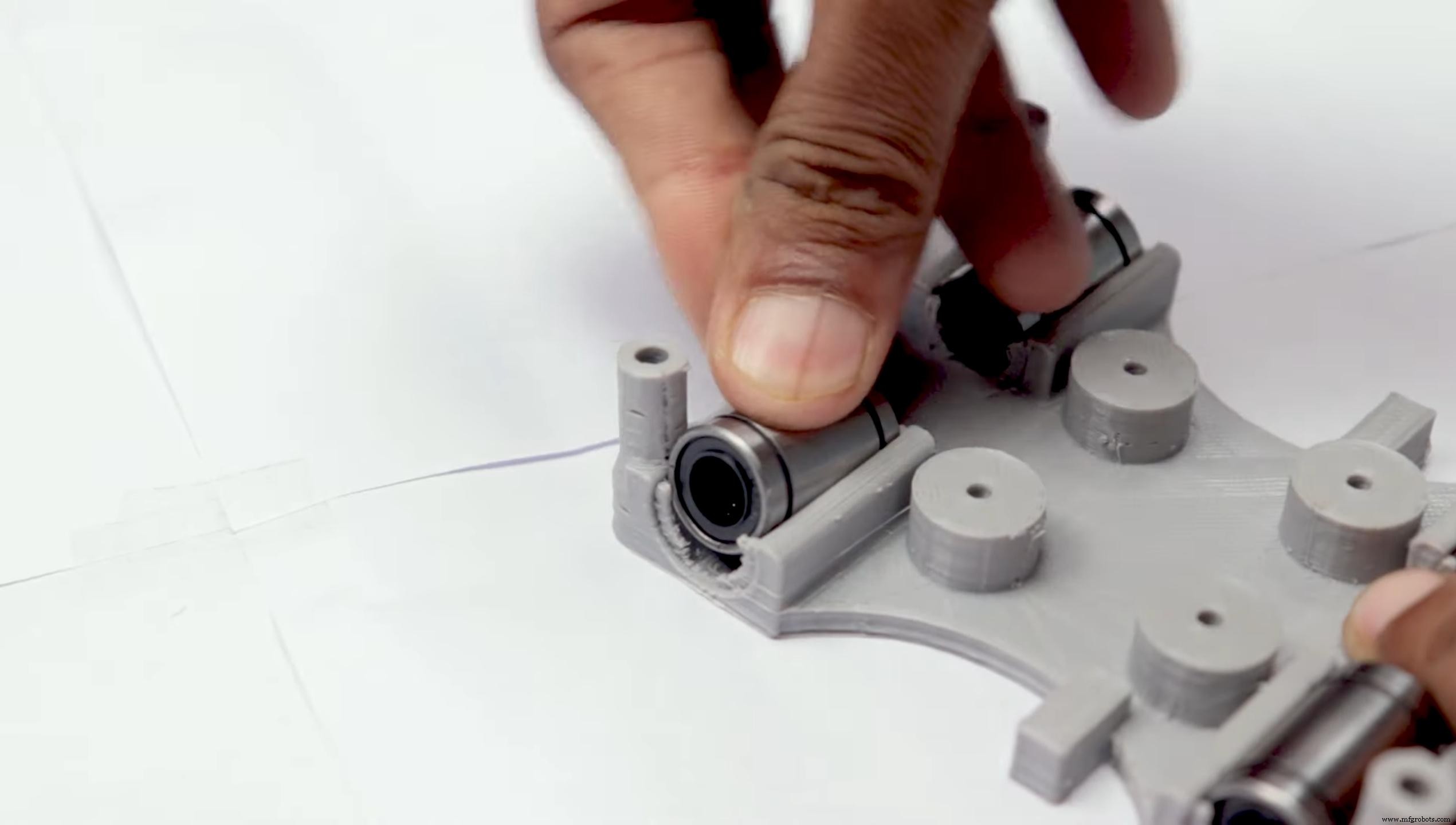 <図>
<図>  <図>
<図>  <図>
<図> 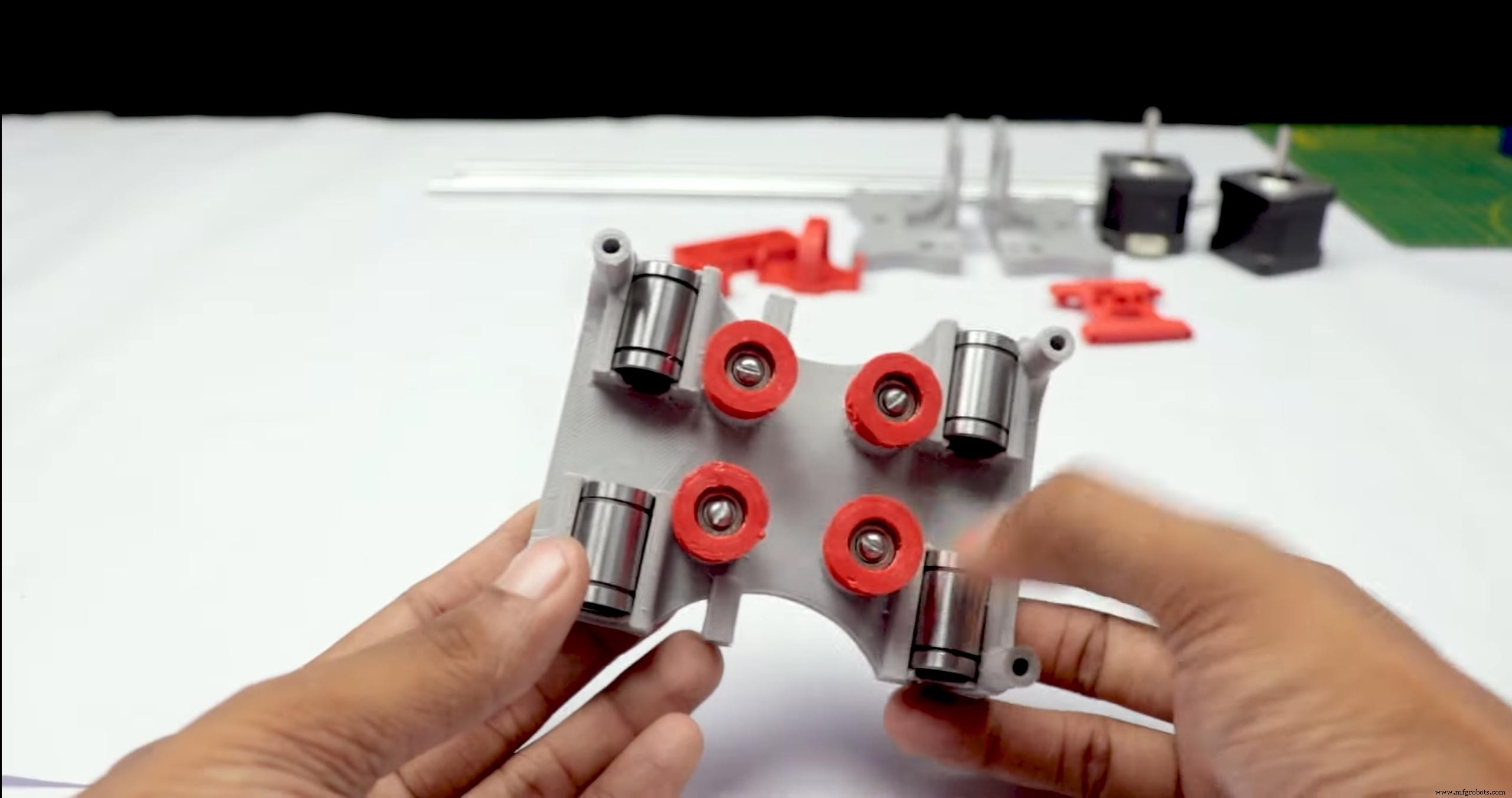
次に、LM8UUベアリングを上部と下部のクラムシェルの所定の位置に押し込みます(上部と下部のクラムシェルはそれぞれ(4)個のベアリングを使用します)
(4)624zzベアリングを取り、3Dプリントされたアイドラープーリーに押し込みます。後でY軸を組み立てるときに5番目のベアリングを残します
X軸(キャリッジ)を組み立てます
- (4)M3-0.5 x 20mmネジ、(4)M3ナット、(4)M3ワッシャー、および(4)アイドラープーリーが取り付けられた624zzベアリングを入手します
- 1本のネジを取り、ワッシャーをそのネジに通します。ワッシャーはベアリングに載ります。ナットはキャリッジの下部にあり、ベアリングを所定の位置に固定します
X軸の組み立て(Xサポート)
- クラムシェルを450mm(X軸)の線形ロッドにスライドさせます
- もう一度ゴム槌を使用して、最後のXサポートをリニアロッドに取り付けます
- ロッドが両側で均等に突き出ていることを確認してください
- ネジ付きロッドのもう一方の端をXサポートの穴に通します
- 最後のナットとワッシャーのセットを装着して、Xサポートを所定の位置に保持します
- X軸が完成したので、(2)フィリップスM3-Xサポートごとに0.5 x 16mmのネジを使用して、線形ロッドが滑らないようにすることができます
ステップ5:Y軸を組み立てる <図>
 <図>
<図> 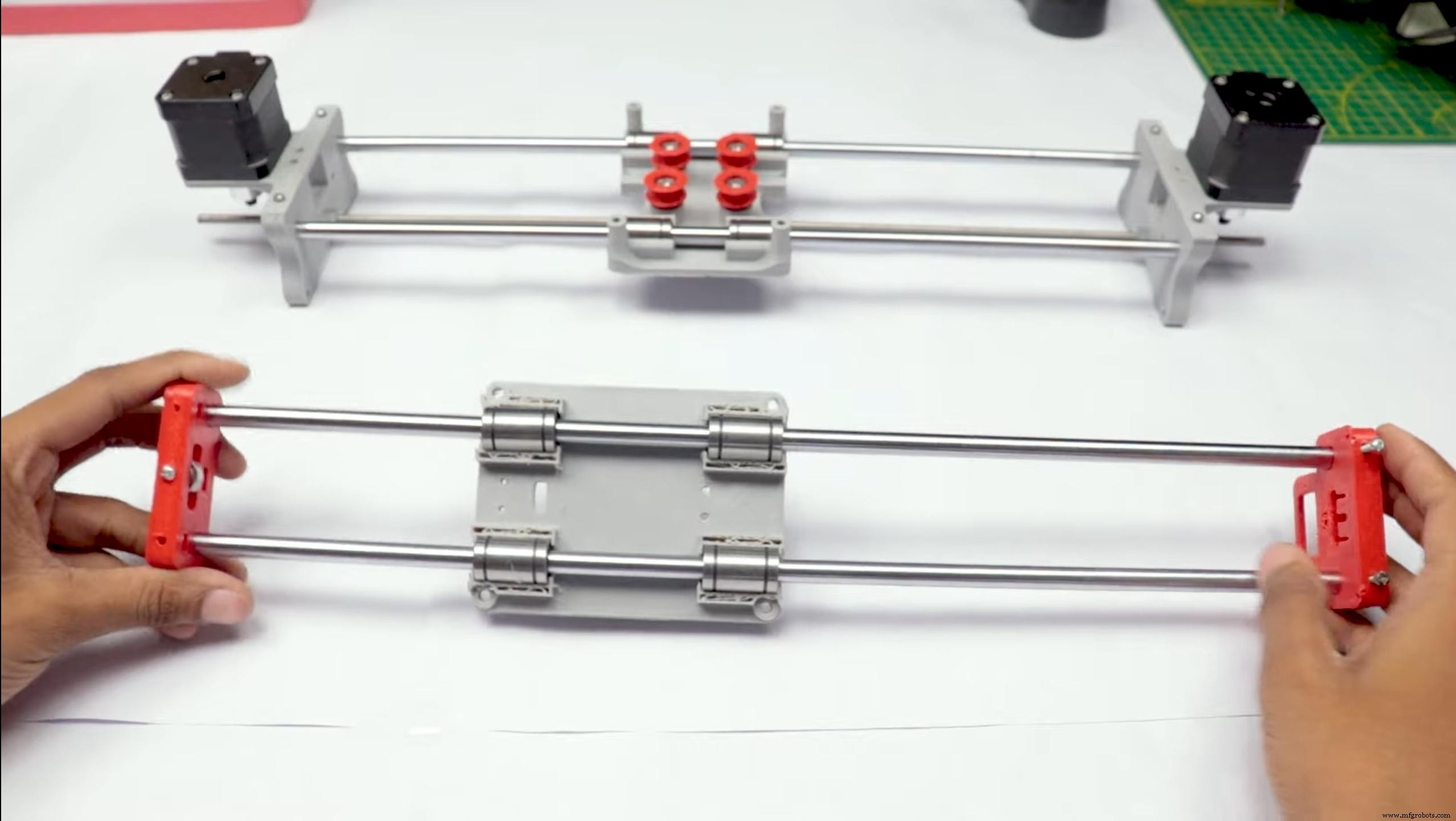 <図>
<図> 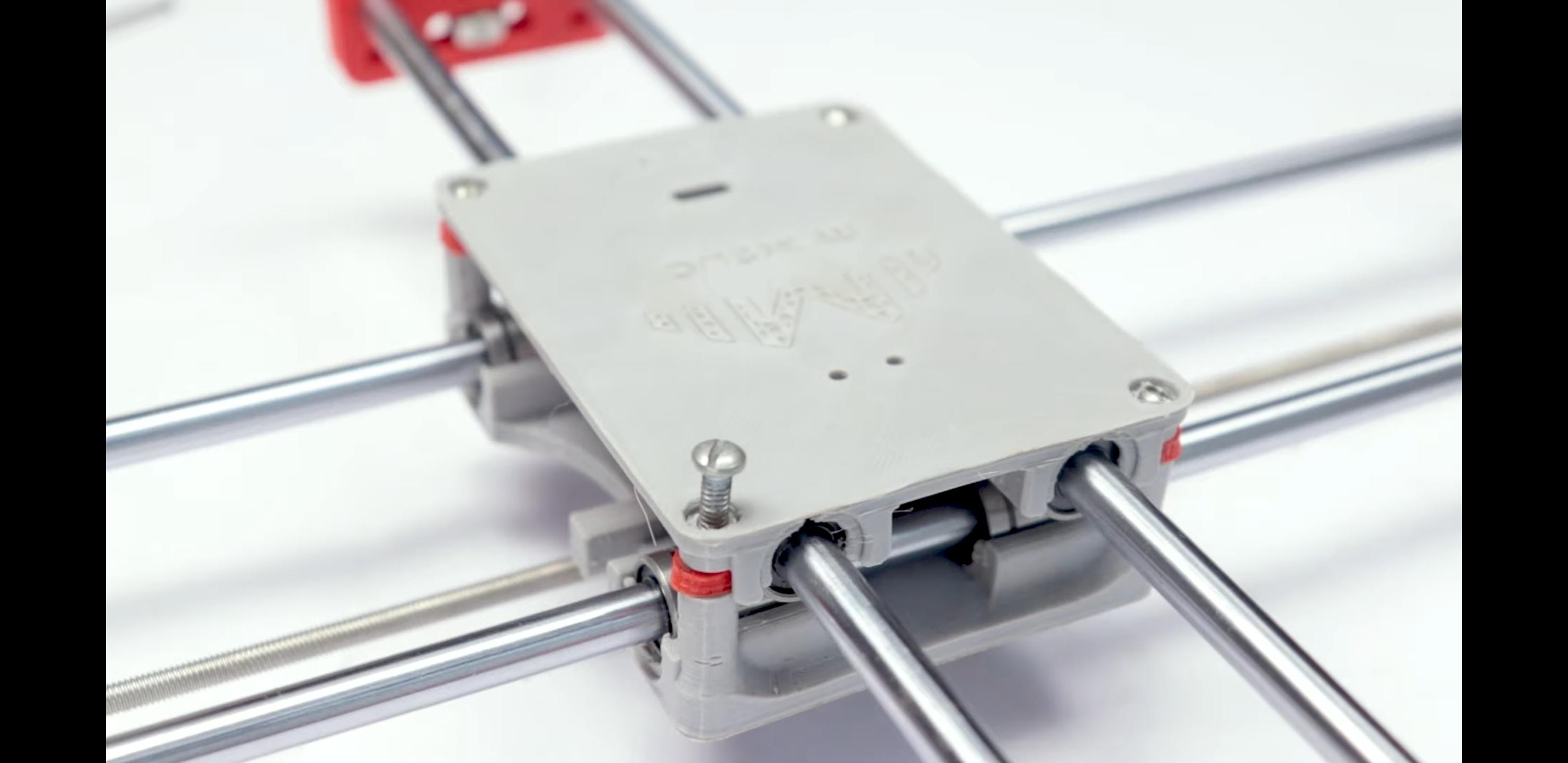
Y-戻る
- (2)350mmの線形ロッドを取り、ゴム槌を使用してYバックピースを挿入します
- (1)M4-0.5 x 35ネジ、(1)M4ナットおよび5番目の624zzベアリングを入手
- リニアロッドを固定するために(2)M3-0.5 x16ネジを入手します
- Yバックピースにネジを挿入するときは、ベアリングをスライドさせます
Yフロント
- リニアロッド/ YバックピースをLM8UUベアリングに通し、ゴム槌を使用してYフロントピースを取り付けます
ステップ6:X-Y軸(ベルト)を組み立てます <図>
 <図>
<図> 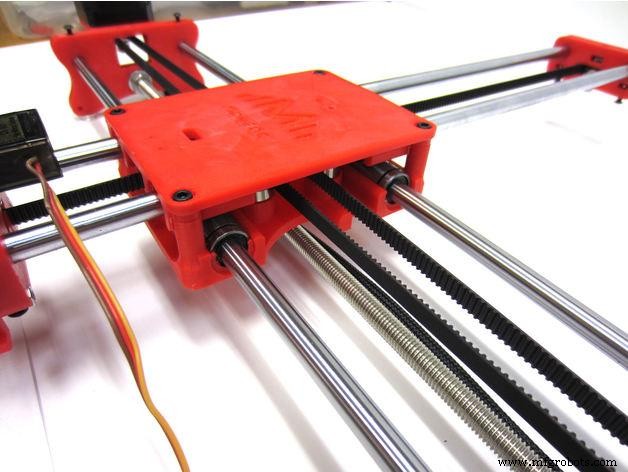 <図>
<図> 
- ラジオペンチを使用して、GT2ベルトをクラムシェルに通しやすくします
- ベルトの両端を取り、ベーススライダーの「歯」に通します
- ベルトはきつく締め、緩んではいけません
- GT2ベルトをオンにすると、クラムシェルが簡単に動かないのが普通です 。
ステップ7:Z軸を組み立てる <図>
 <図>
<図> 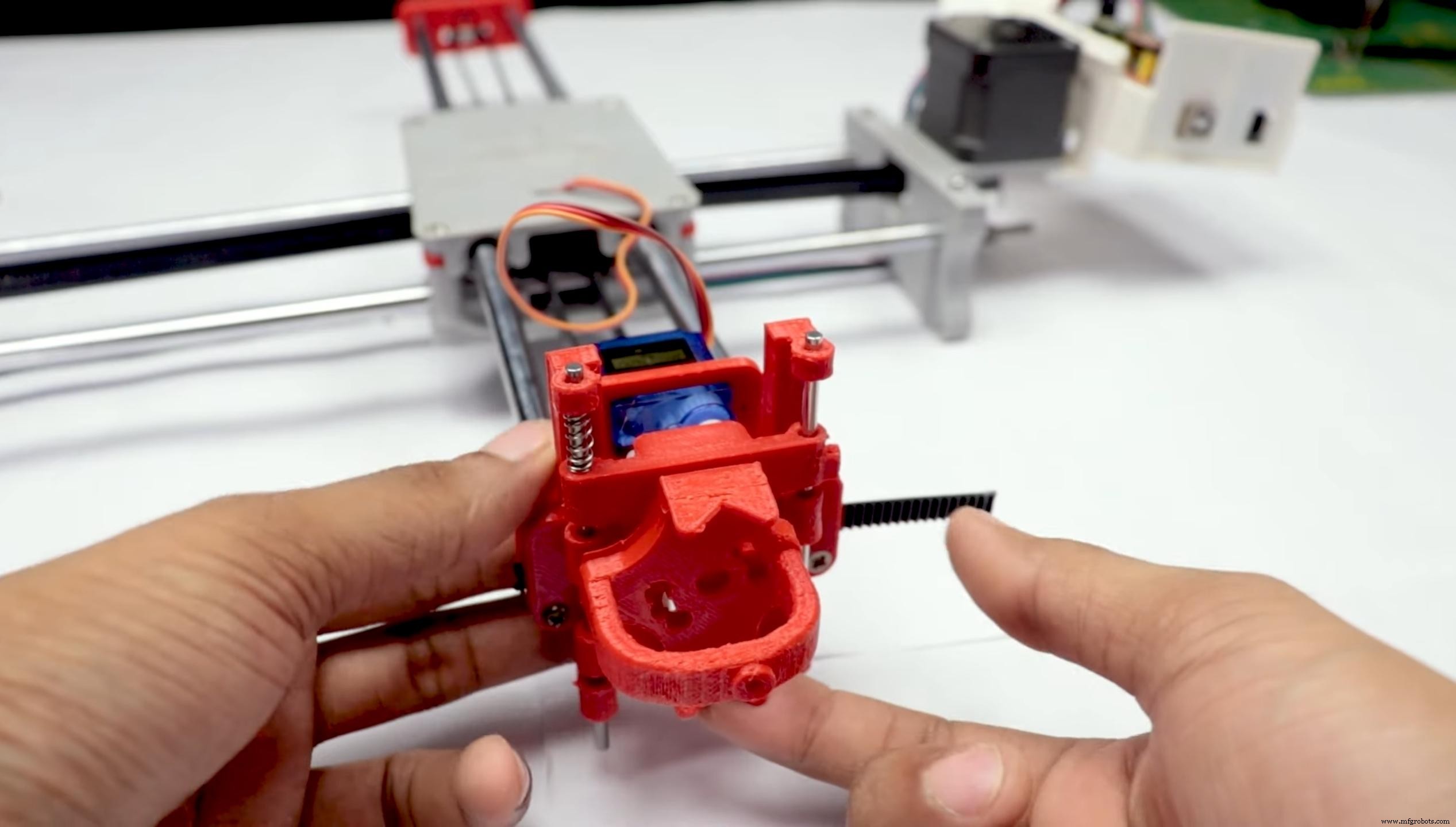 <図>
<図> 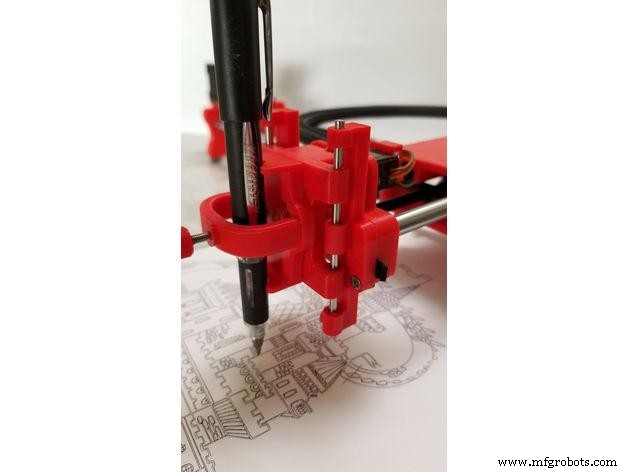
- (2)3mmリニアロッドと次の3Dプリントパーツ(スライダー、ペンホルダー、ベーススライド、3MMメートル法のつまみネジ)を入手します
- (1)六角M3-0.5 x 20mmネジとメートル法のつまみネジを入手して、一緒に押します。瞬間接着剤を使用して一緒に保ちます。
- ベーススライドをYフロント部分に固定するために使用する(3)M3-0.5 x16mmネジを入手します。所定の位置に保持するために、(3)M3-0.5ナットを使用する必要がある場合があります
- スライダーとペンホルダーを一緒に押して、1つのピースを作ります
- 次に、その新しい部品と(2)3mmの線形ロッドを取り、ロッドを穴に通します。スライダーを持ち上げるのに少し圧力がかかるように、2つの部分の間に小さなバネを置きます。スライダーに十分な圧力がかかるまで、スプリングを少し切る必要があるかもしれません。
ステップ8:ELECTRONICS <図>
 <図>
<図> 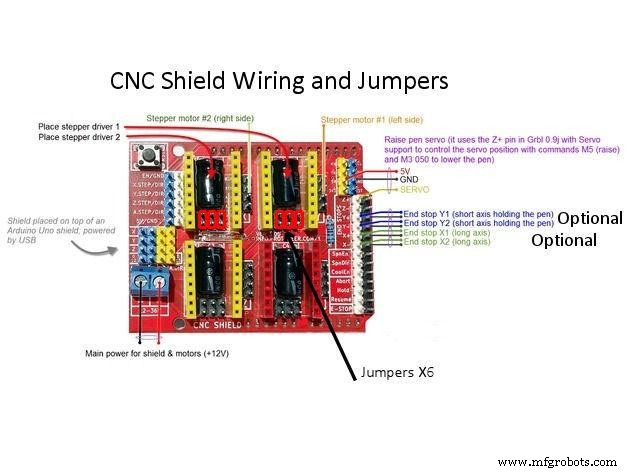 <図>
<図> 
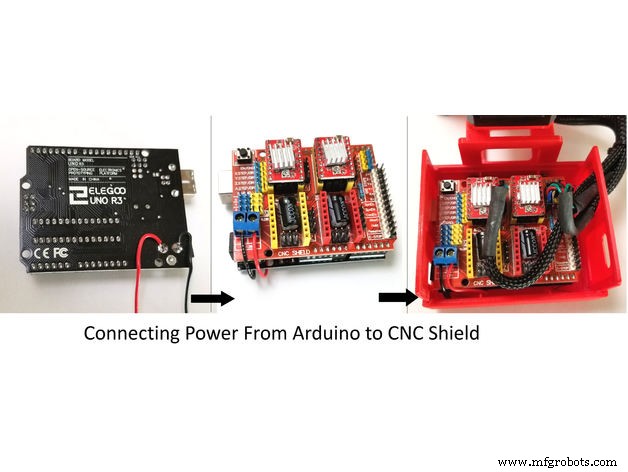
エレクトロニクス
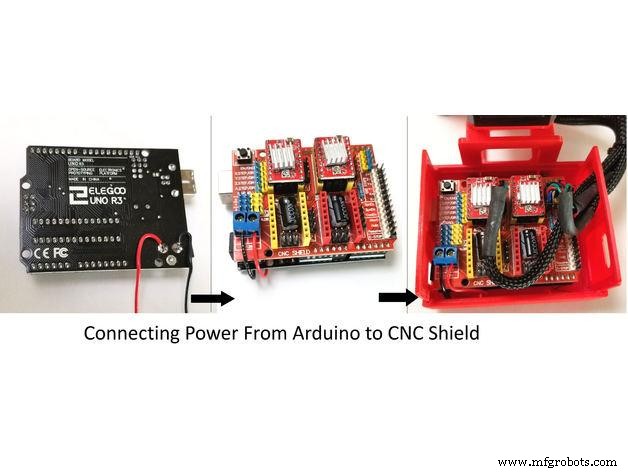
Arduino unoCNCシールドを使用できることをお勧めします
すべての回路の準備ができました
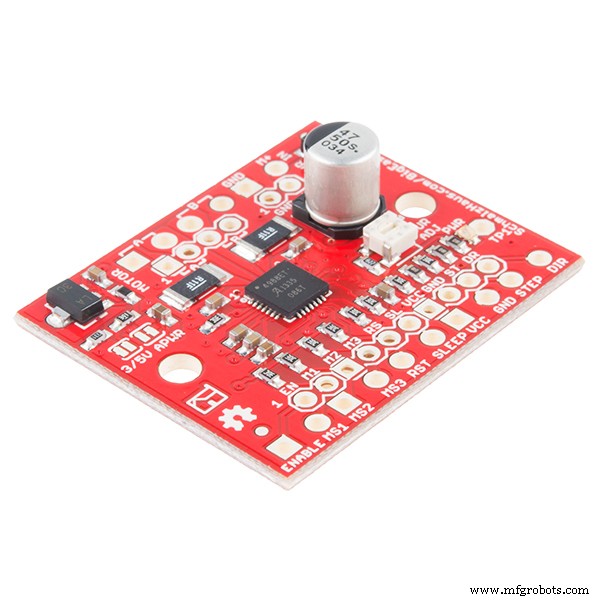
1)4個のA4988ステッピングモータードライバー
2)拡張ボードA4988ドライバー
3)Arduino UNOまず、ヒットシンクを取り、A4988モータードライバーに固執します。
4個のA4988ステッピングモータードライバーを拡張ボードA4988ドライバーモジュールに接続し、次にarduinoを拡張ボードに接続してすべての配線を接続しますシールドにはマイクロステッピングコントロールも組み込まれています-つまり、大きなCNCのようにフルステップまたはハーフステップを使用する代わりにモーターを1/16または1/32ステップ移動させて、レーザーを可能な限り最高の精度で移動させることができます。ただし、モーターはより多くの電力を消費します。モーターはより速く熱くなります。
マイクロステッピングモードを使用するには、いくつかのモードピンを一緒に短絡します。組み合わせが異なれば、解像度も異なります。可能なさまざまな構成については、チャートを参照してください。シールドがプログラムされたら、A4988ドライバーをシールドに追加し、残りの電子機器を配線します。
ステッピングモーターのコイルを見つけるには、マルチメーターを使用します。 2本のワイヤーの間に抵抗がある場合は、コイルがあります。回路図では、コイルは同じ色の2本のワイヤーで表されています。
ステップ9:ソフトウェア <図>
 <図>
<図> 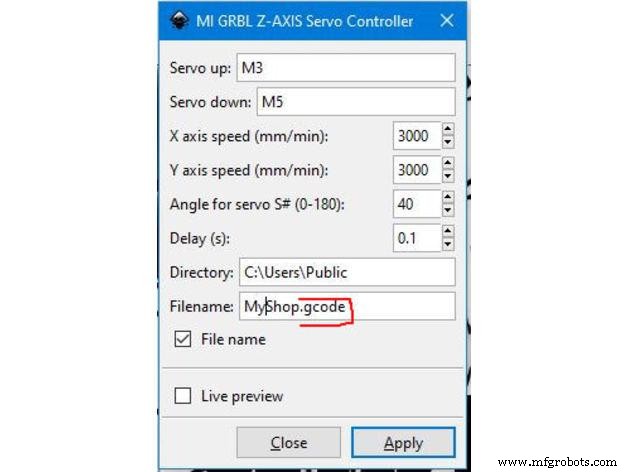 <図>
<図> 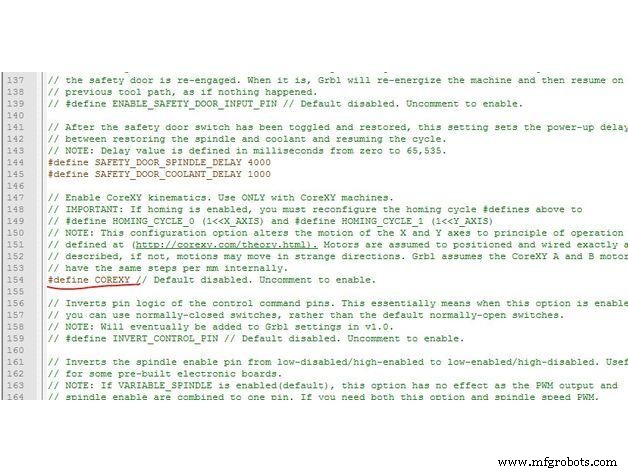 <図>
<図> 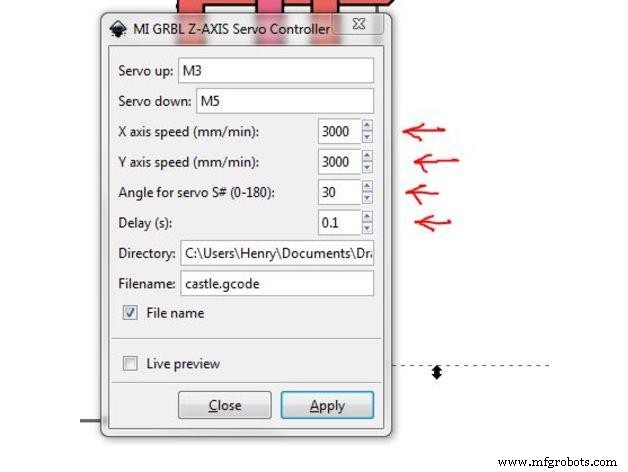 <図>
<図> 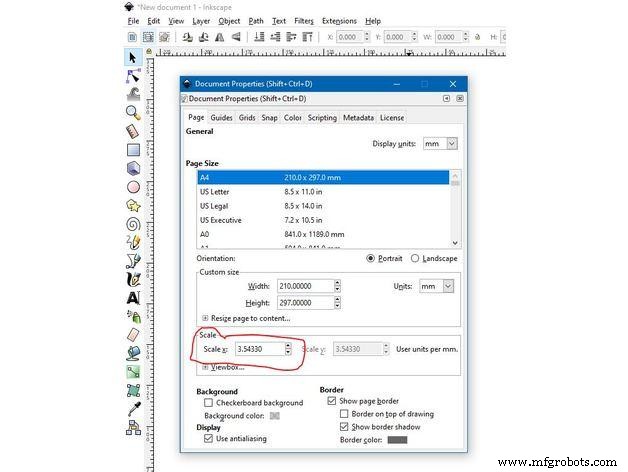 <図>
<図> 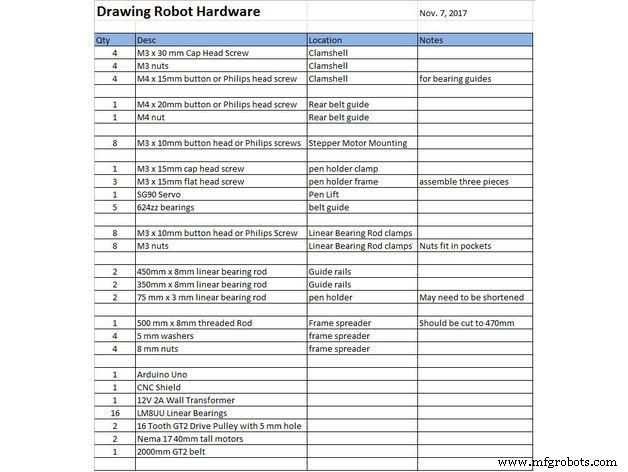 <図>
<図> 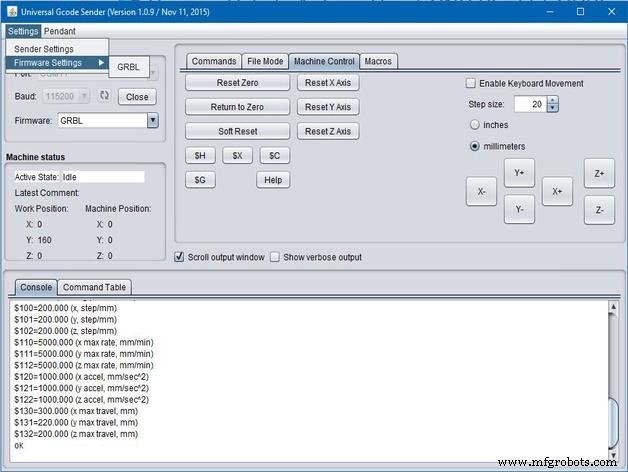 <図>
<図> 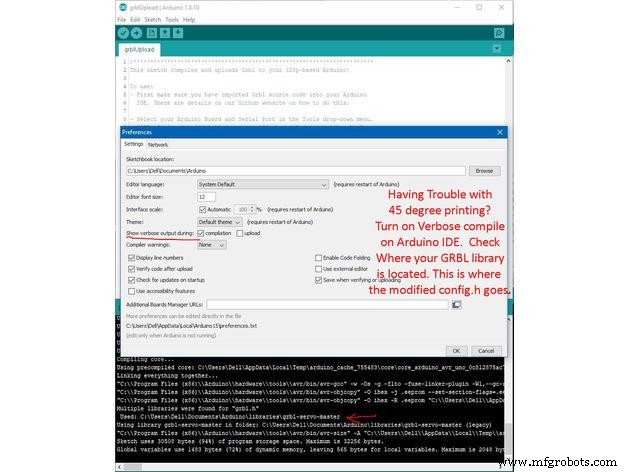
グラフィックデザインソフトウェア(グラフィックの描画またはインポート)であるInkscape
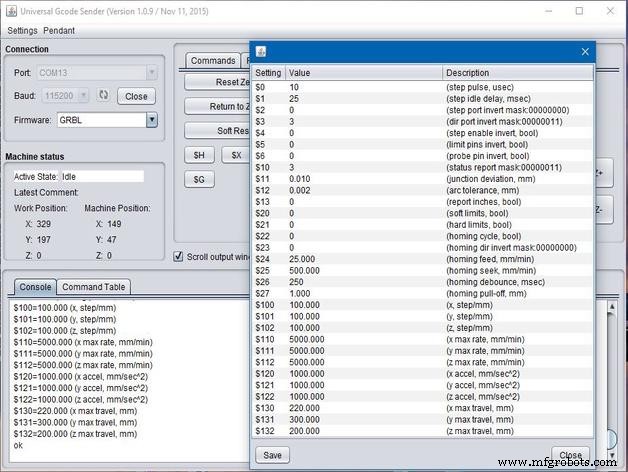
Inkscape MI GRBL Extension(グラフィックをGコードに変換)Universal G Code Sender(Gコードをロボットに送信して描画モーションを発生させます)ArduinoファームウェアであるGRBL(Arduino Unoにプログラムされています)
Arduino:https://www.arduino.cc/en/software
ユニバーサルGコード送信者:https://winder.github.io/ugs_website / ...
Inkscape:https://inkscape.org/release/inkscape ..
4xiDraw&kmレーザー:https://drive.google.com/file/d/1YO8 -...
処理:https://processing.org/download/
Gコード処理への描画:https://drive.google.com/file/d/1PIFx ...
フルセットアップのビデオを見る
ステップ10:作業中の製図機
コード
- grblコード
grblコード Arduino
/ ********************************************** *************************このスケッチは、Grblをコンパイルして328pベースのArduinoにアップロードします!使用方法:-まず、GrblソースコードをArduinoIDEにインポートしたことを確認します。これを行う方法については、Github Webサイトに詳細があります。-[ツール]ドロップダウンメニューで、Arduinoボードとシリアルポートを選択します。注:Grblは、Unoのような328pベースのArduinoのみを公式にサポートしています。他のボードを使用しても機能しない可能性があります!-次に、[アップロード]をクリックするだけです。上級ユーザー向け:Grblで他に何ができるかを知りたい場合は、カスタマイズ用の追加オプションと、有効または無効にできる機能がいくつかあります。 Arduino IDEがGrblソースコードファイルを保存している場所にファイルシステムをナビゲートし、お気に入りのテキストエディタで「config.h」ファイルを開きます。内部には、数十の機能の説明と#definesがあります。 #definesにコメントを付けるかコメントを外すか、割り当てられた値を変更して変更を保存し、ここで[アップロード]をクリックするだけです。 Copyright(c)2015 Sungeun K.JeonMITライセンスの下でリリースされました。詳細については、license.txtを参照してください。******************************************* **************************** /#include//このファイルは変更しないでください!
回路図
製造プロセス