


ロボット手首とは:決定的なガイド
製造業では、ロボット工学がさまざまなプロセスを自動化することがよくあります。これらのロボット工学は、企業のプロセスを合理化し、怪我のリスクを軽減するのに役立ちます。このような企業に採用されているロボット工学のほとんどは、ピックアンドプレース、組み立て、パッケージングなどで使用されるロボットアームです。これらのロボットアームに関しては、覚えておくべきいくつかの側面があります。そのうちの1つは、ロボットアームに搭載されているロボット手首です。ほとんどの人は、ロボットアームのこの非常に重要な部分についてあまり知りません。この短い記事では、それが何であるか、そしてそれが何を伴うかについてさらに詳しく説明します。 出典:www。 k-and-s.com
ロボットアームを使用する場合、通常は2つの重要なコンポーネントが機能します。これには、体と腕自体が含まれます。腕には、さまざまな方向に移動できるさまざまな関節を備えたロボットの手首があります。この動きにより、ロボットの手首は、端に取り付けられているエンドエフェクタを制御できます。ロボットアームが実行する必要のあるさまざまなタスクを実行するのに役立ちます。それはすべて、共通の目的を達成するためにそれぞれの役割を果たすさまざまな部分のシステムです。ロボットアームに搭載されているロボットリストには、さまざまなアプリケーションでシームレスに動作できるようにする、少なくとも2〜3個のコンパクトなジョイントが付属しています。 出典:www。 brainkart.com
ロボットの手首のメカニズムはマニピュレーターの大きな部分であり、さまざまなアプリケーションに合わせてエンドエフェクターを方向付けるように機能します。このメカニズムは、軸を中心に回転するアームで構成され、さまざまな方向にさまざまな動きをすることができるジョイントを備えています。使用中のロボット手首機構は、さまざまな作業環境にさらされます。使用中はさまざまな振動にさらされることがわかります。これらの振動は、ロボットの手首とその機能に悪影響を与える可能性があります。
ロボットの手首が最高の状態で機能することを確認する最良の方法は、その性能を注意深く研究することです。エンドエフェクターによって運ばれる負荷に異なる重みをかけ、それがどのように機能するかを確認します。これにより、ペイロードを測定し、適切な場所で使用して損傷を防ぐことができます。さらに、マニピュレータとロボットの手首が正しく構成されていることも確認する必要があります。覚えておくべき手首の構成には、次のものがあります。
この構成は、リストスイベルとも呼ばれます。手首のメカニズムが腕の軸を中心に回転するのが特徴です。
手首機構構成のピッチは、手首曲げとも呼ばれます。手首を上下に回転させるのが特徴です。
ヨーを使用すると、手首の動きと回転が左右に専用になります。
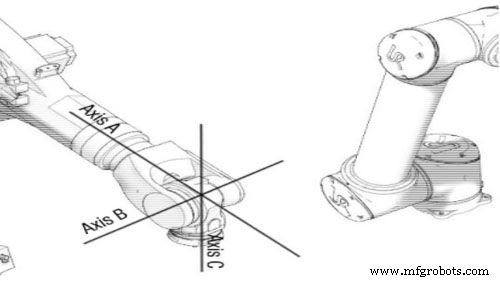
表記TRLは、垂直軸と水平軸の両方で回転できるスライドアームを備えています。
これにより、ロボットの手首は垂直の支柱に対して機能します。これにより、手首は、手元のタスクに応じて上下または内外に移動できます。
LOOという表記は、手首をさまざまな方向に動かすことができる3つのスライドジョイントで構成されています。 3つのスライディングジョイントのうち2つは直交しています。それらは主に直線ロボットとX、Y、Zロボットに見られます。 出典:www。 researchgate.net
使用しているロボットアームの品質が高く、正確に設計されていることを確認することが重要です。ここで考慮すべき最も重要な要素の1つは、作業する手首の構成です。手首が特定のニーズに応じて構成されていることを確認する必要があります。エンドエフェクタは手首がとる方向にのみ移動することを忘れないでください。これは、適切な構成を使用することで、エンドエフェクターが正確にピックアンドプレースできることを示しています。
さらに、右手首の構成は、怪我やロボットアームの損傷のリスクを軽減するのに役立ちます。特定のタスクで手首を動かす方向を決定し、ニーズに合わせて手首を変更します。ロボットの手首はロボットアームの重要な部分であるため、よりスムーズでシームレスな自動化プロセスのために、構成のニーズを確認してください。
ロボットの手首は、さまざまな自動化タスクにロボットアームとマニピュレーターを使用する場合に重要な側面です。ロボットの手首を動かす前に考慮する必要のあるさまざまな構成が特徴です。これにより、エンドエフェクタを正しい方向に動かすように設計された最適な構成で作業していることが保証されます。ロボットアームを入手するときは、ロボットアームの製造元に好みに合わせて構成してもらうことを検討してください。これにより、ビジネスプロセスで簡単に使用できるようになります。 

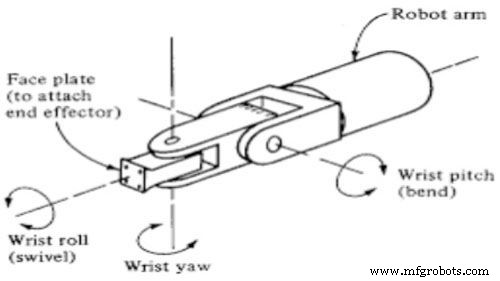
ロール
ピッチ
ヨー
表記TRL
表記TLO
表記LOO
結論
産業用ロボット