


RoboDK のインターフェイスをカスタマイズする 10 の便利な方法
すべてのロボット ユーザーは、プログラミングの好みが異なります。ここでは、RoboDK のインターフェースを自分に合わせてカスタマイズする 10 の優れた方法を紹介します。
他人のキッチンで朝食を作ろうとしたことはありますか?
悪夢ですね!?
カトラリーがどこにあるのかわからず、トースターのボタンの配列はわかりにくく、冷蔵庫はモルドールの山よりも操作が難しそうです。
これは、普段使用しているプログラミング ソフトウェアとは異なるプログラミング ソフトウェアを使用しようとすると、まさにそのように感じられるものです。インターフェースが正しく見えず、慣れるまでに時間がかかる場合があります。
しかし、RoboDK を使用すると、妥協する必要はありません。インターフェイスは非常にカスタマイズ可能です。ニーズに合わせてさまざまな側面の印象的な配列を変更するオプションがあります。
ここでは、RoboDK のインターフェースを好みに合わせてカスタマイズするための 10 の非常に役立つ方法を紹介します。
1.ダークモードに変更
何年も前、私が大学にいたとき、同僚の 1 人が、プログラミング中に「ダーク モード」に変更することの利点について教えてくれました。
ほとんどのソフトウェア パッケージでは、白い背景に黒いテキストが使用されています。ダーク モードでは、すべての色が反対になるようにすべての色が反転されます。つまり、背面の背景に明るいテキストが表示されます。多くの人は、ダーク モードが目の疲れを軽減すると言っています (また、古い CRT モニターのちらつきが軽減されたという証拠もいくつかあります)。
最近の最新の画面では、ダーク モードが本当に目に良いかどうかについては、相反する理論があります — プログラミング中に定期的に目を休めた方がずっと良い — しかし、1 つだけ確かなことは言えます。
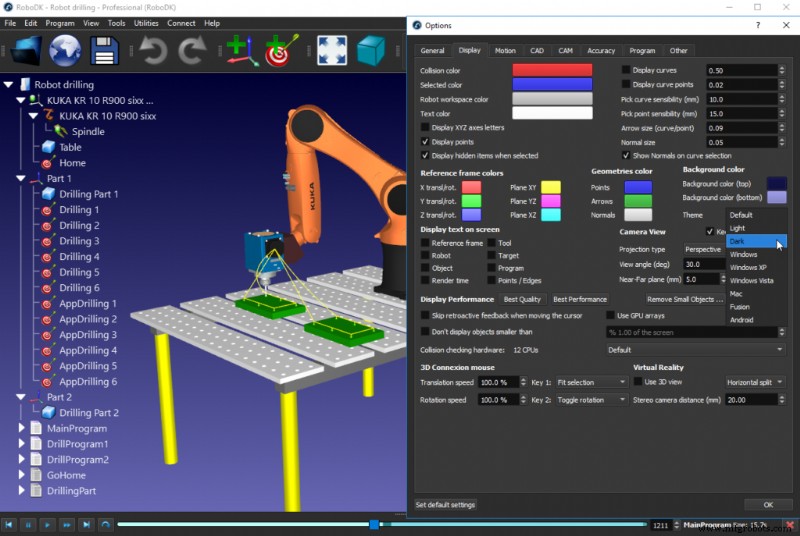
ダーク モードのファンであれば、OS をダーク モードに設定すると、RoboDK が自動的にダーク モードを有効にします。これは、表示オプションでカスタマイズすることもできます ([ツール]> [オプション] ウィンドウ> [表示] タブを選択します)。 )。
OLED ディスプレイ (ただし LCD ではありません) では、ダーク モードは画面で使用される電力を削減することもできます。これは、バッテリー電源で RoboDK を使用している場合に最適です。
2.すべての色を選択
ダーク モードを使用していない場合でも、RoboDK のほぼすべての色を好みに合わせて変更できます。
変更できる色には、衝突の色、テキストの色、点の色、背景色、参照フレームの色、および選択したアイテムの色が含まれます。
これらはすべて、[ツール]> [オプション] ウィンドウ> [表示] タブで変更できます .
3.お気に入りのマウス モードに合わせる
さまざまな 3D グラフィックス プログラムのユーザーとして、新しいプログラムに切り替えてマウス モードが異なるとどれだけ煩わしいかを知っています。突然、上が下になり、下が上になり、マウス ホイールの機能が変化し、ボタンの機能が反転します。
RoboDK では、[ツール] メニュー> [オプション] ウィンドウ> [全般] タブからマウス モードを好みのモードに変更できます。 .
4. CAD/CAM パッケージを自動的に一致させる
お気に入りの CAD/CAM パッケージを RoboDK に統合している場合は、当社のプラグインの 1 つを使用して、RoboDK をそのプログラムのビジュアル スタイルとマウス モードに自動的に一致させることができます。
たとえば、SolidWorks プラグインを使用している場合、プラグイン メニューから「SolidWorks テーマ」を設定できます。
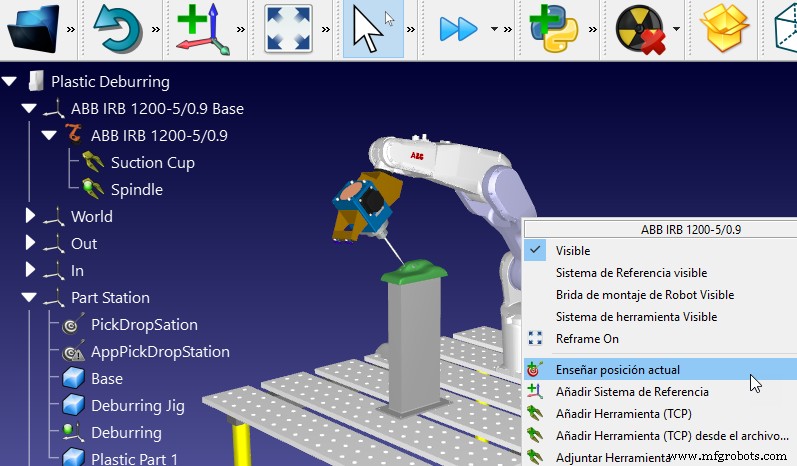
5.言語を変更
メニューが母国語で書かれていると、新しいソフトウェアの操作が常に簡単になります。
RoboDK では、[ツール] メニュー> [言語] から簡単に言語を変更できます。
執筆時点では、最も一般的な 16 の言語のサポートが含まれています。すべての言語が完全に翻訳されているわけではありませんが、主要な機能は示されています。
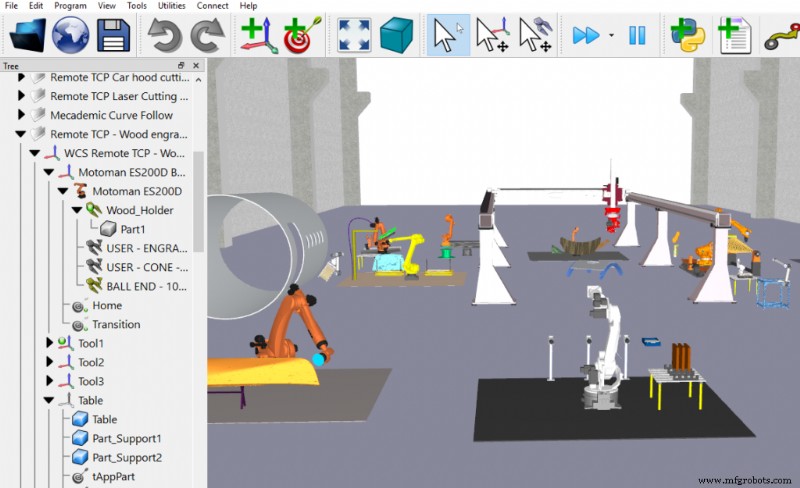
6.視点を切り替える
3D グラフィックスを使用するプログラムには、興味深い問題があります。現実の世界と同じようにオブジェクトを表示したい場合があります (リアルな遠近効果を使用)。また、モデルが現実的でなくても、ビューに寸法をより正確に反映させたい場合もあります。
[ツール] メニュー> [オプション] ウィンドウ> [表示] タブを使用して、2 つのビュー (遠近法と正投影) を切り替えることができます。
7.スイッチ番号の形式
世界のすべての国は、小数点 (.) を使用して 10 進数を区切る国とコンマ (,) を使用する国という 2 つのグループに分けることができます。
例:
- 日本では、数字は次の形式で表記されます: 1,234,567.89 — このフォームは、世界の約 41% の国で使用されています。
- スウェーデンでは、数字は次の形式で表記されます:1.234.567,89 — このフォームは、世界の約 55% の国で使用されています。
- 最後に、カナダでは、数字は文脈に応じて両方の形式で表記されます。 — これは、世界の約 4% の国に当てはまります。
RoboDK の数値ロケールは、[ツール] メニュー> [オプション] ウィンドウ> [全般] タブから変更できます。
8.ツリーのサイズとスタイルを設定
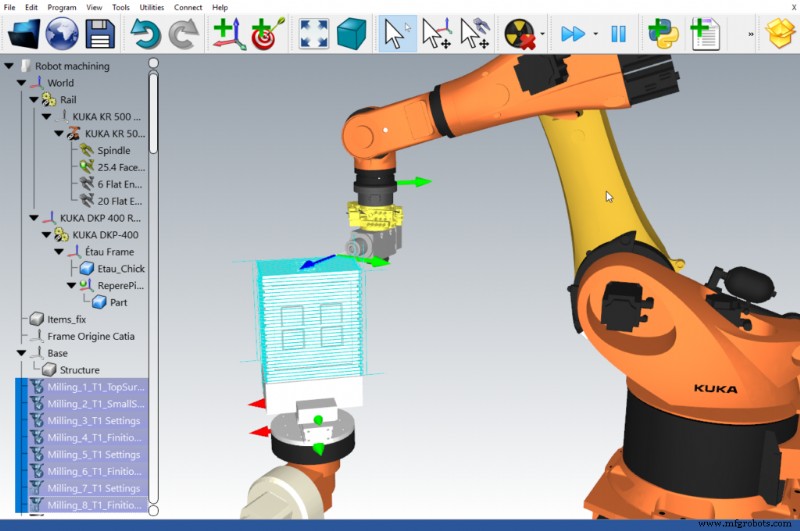
プログラム ツリーは、RoboDK ウィンドウの左側に表示されます。現在のシミュレーションのすべてのオブジェクトとプログラム命令が含まれています。
場合によっては、プログラム ツリーを縮小して、その中のすべての項目をより完全に表示したいことがあります。また、もう一度ズームインしたい場合もあります。
Ctrl を押したままにすると、プログラム ツリーのサイズを変更できます。 キーを押し、マウス ホイールを回転させます。
[表示] メニュー> [ツリーをウィンドウ内に表示] を使用して、ツリーの背景を透明からドッキングに、またはその逆に変更することもできます。
9.速度またはパフォーマンスの最適化
RoboDK は、パフォーマンスの低いコンピューターでも非常にうまく機能します。ただし、計算負荷を軽減するために、一部の表示設定を変更することをお勧めします。
[ツール] メニュー> [オプション] ウィンドウ> [表示] タブで見つけることができる表示パフォーマンスに関する 3 つのオプションがあります。 .これらにより、最高品質または最高パフォーマンスの表示をカスタマイズできます。または、Simplify Object を使用して 3D モデルの頂点の数を減らすことができます。
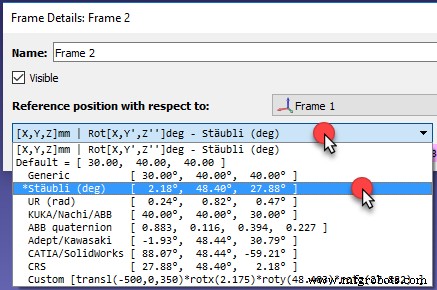
10.オイラー角モードを選択
オイラー角は、空間内の位置と方向を表すためにロボット工学で使用される方法です。腹立たしいことに、すべてのロボット メーカーと CAD/CAM パッケージは、別の座標系に対する座標系 (ポーズとも呼ばれます) の位置を表すために、オイラー角に対してわずかに異なる規則を使用しています。
RoboDK は、すべての主要なロボット メーカーのオイラー角規則をサポートしています。 [ツール] メニュー> [オプション] ウィンドウ> [全般] タブで、各座標系の設定またはデフォルト設定を介して、使用されるそれぞれの規則を変更できます。
オイラー角の完全な紹介については、記事「ロボットのオイラー角:基本入門書」をご覧ください。
どのような好みであっても、RoboDK には選択肢があります!
RoboDK をどのようにカスタマイズしますか? 以下のコメント欄でお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションにご参加ください。
産業用ロボット